Ce document est l’aboutissement d’une idée qui a évolué sur... plus logique possible dans les explications qui y sont écrites.... Avant propos

1
Avant propos
Ce document est l’aboutissement d’une idée qui a évolué sur plusieurs années. J’espère avoir été le
plus logique possible dans les explications qui y sont écrites. Vous y trouverez par ordre de
transcription :
Mes observations des cas avérés de sur-unité virtuelle et du fonctionnement d’un alternateur.
Mes constations.
Mes déductions logiques qui résultent de ces constatations.
L’expérimentation mentale des mes déductions.
La confrontation des résultats de cette expérimentation mentale en conformité avec les lois physiques.
Similitude entre gravitation et phénomène électromagnétique
Formulation
Il manque l’expérimentation pratique.

2
Observations des cas avérés de sur-unité virtuelle
La poulie:
La poulie équilibre deux charges suspendues grâce à la gravitation et au support de poulie qui
compense la gravitation. C’est la terre par l’intermédiaire du support de poulie qui assume la
compensation.
En rompant cet équilibre avec une faible énergie les deux charges vont se déplacer. Cette faible
énergie permet aux deux charges d’exprimer leur énergie potentielle équilibrée.
Pendant le temps ∆t de déplacement nous avons une apparence de sur-unité. Car la faible énergie de
déséquilibre à l’origine du mouvement n’est pas génératrice de l’énergie des deux charges en
mouvement. C’est la gravitation qui est génératrice de l’énergie des deux charges en équilibres et la
terre qui assument la compensation de l’action d’équilibrage. Sans compter qu’il a fallu développer
de l’énergie pour mettre les charges en position adéquate.
Nous avons donc pendant un temps ∆t, une apparence de sur-unité dans le respect de la loi de la
thermodynamique. Exemples : certains Ascenseurs à bateaux, monte charge, ascenseur pour le
personnel, pont-levis, Barrages hydroélectriques, Ballons dirigeables, Bateaux, …
Les ballons dirigeables et non dirigeables :
Sans entrer dans les détails, c’est la poussée de l’atmosphère qui équilibre la gravitation responsable
du poids du ballon et le maintien à une certaine altitude.
Les bateaux :
Sans entrer dans les détails, c’est la poussée de l’eau qui équilibre la gravitation responsable du poids
du bateau et le maintient au dessus de l’eau.
Le fonctionnement d’un alternateur actuel qui n’est pas un cas de sur-unité.
Quand l’alternateur est en charge normale, l’effet de la réactance d’induit est un couple antagoniste
sur l’axe moteur. Il faut alors appliquer sur l’axe moteur un couple suffisant pour compenser le couple
de l’effet de la réactance d’induit. Les machines actuelles ont en général un rendement de 80%.
Pv = puissance à vide
Pu = 0
Pa = Pu + pertes en charge
Pu = x
A vide En charge, en fonctionnement normal
M M

3
Constatations
Ces cas de sur-unité virtuelle autorisent des rendements (η) avérés supérieurs à l’unité, tout en
respectant les lois de la physique. Ils nous permettent dans bien des applications de faire des
économies effectives d’énergie. Ces économies sont recherchées et appliquées. Car elles nous
permettent de faire des économies budgétaires avérées et de moins polluer.
Pour les trois premières observations irréfutables, la nature de l’action qui assure l’équilibre des
énergies est indépendante du résultat qui est la sur-unité
La réactance d’induit des alternateurs réagis au différentiel de rotation et ces effets s’y opposent. Que
l’induit ou l’inducteur soit en rotation et l’autre statique, le résultat est le même.
Information fournie non constatée : Les champs magnétiques se propagent à une vitesse équivalente à
celle de la lumière.
Déductions logiques qui résultent de ces constatations.
S’il faut appliquer sur l’axe de l’alternateur un couple suffisant pour compenser le couple de l’effet de
la réactance d’induit. Je peux en déduire que la compensation de Pu en charge est égale à l’effet de la
réactance d’induit.
Si la nature de l’action qui assure l’équilibre des énergies est indépendante du résultat. Je peux
m’affranchir de la gravitation, pour la remplacer par des phénomènes électromagnétiques.
Fort de ces observations avérées, de ces constatations et des déductions logiques qui en résultent ; je
propose un assemblage qui respecte les critères précédents avec l’avantage de la continuité de
mouvement. J’utilise les mêmes phénomènes physiques connus qui ont déjà fait leur preuve.

4
L’expérimentation mentale de mes déductions.
J’utilise un système d’engrenages dessinés si dessous.
Les axes des engrenages A et B ne sont pas solidaires.
J’impose les conditions : Ø des engrenages de l’axe moteur = x
Ø de l’engrenage de l’axe A = x/2
Ø de l’engrenage de l’axe B = x
Si l’axe moteur tourne à une vitesse angulaire V = ω, la vitesse de A sera 2ω et celle de B sera ω.
En fonction des rapports d’engrenages de 1/2, si l’engrenage A reçoit un couple Ea, et l’engrenage B
un couple Eb = Ea/2, ces deux couples vont s’équilibrer sur l’axe moteur.
Le couple perpendiculaire au plan de rotation, du à la distance entre les deux engrenages moteur, est
compensé par les paliers de l’axe moteur.
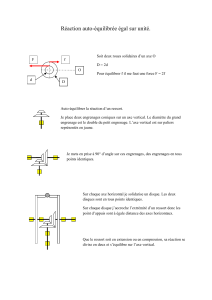
J’utilise un alternateur bis rotors (rotor A et rotor B). De
sorte que l’induit et l’inducteur soient tout les deux
solidaires de leur axe respectif A et B de la boîte.
J’entraîne l’ensemble par un moteur solidaire de l’axe
moteur. Le moteur n’est pas représente sur le schéma
Je mets l’ensemble en rotation en appliquant sur l’axe
moteur un couple supérieure aux pertes.
Je mets l’alternateur bis rotor en charge normale.
La réactance d’induit tend à figer les rotors A et B, son
effet (E) se répartie en deux valeurs Ea et Eb, qui ne
peuvent être que égales, car la réactance d’induit utilise
comme point d’appuis et point d’action les rotors A et B.
Ea = Eb au niveau des Rotors. Car si Ea ou Eb devait être
différents ils se rééquilibreraient immédiatement du fait
des points d’appui et d’action communs à la réactance
d’induit.
Ea et Eb vont se reporter respectivement sur les engrenages
A et B de la boîte d’engrenages.
Similitude des résultats de l’expérimentation mentale
Ea=2Eb
Eb
Axe moteur
Axe A
Axe B
(creux)
Ø = x
Ø = x/2
Boîte d’engrenages
A B
Alternateur bis-rotors
V = ω
V = 2ω
Boîte d’engrenages

5
Conformité avec les lois de la physique.
Les valeurs Ea = Eb des effets de la réactance d’induit sur les deux rotors A et B ne seront plus égales
une fois reportées sur leur engrenage respectif. Car le rapport d’engrenage entre A et B est de ½.
Sur l’engrenage A la valeur sera Ea = 2 Eb et sur l’engrenage B la valeur Eb sera égale à Ea/2.
Le rapport de ½ inversé de la boîte d’engrenage, reporte Ea et Eb sur l’axe moteur tel que, Ea = Eb.
Sur l’axe moteur Ea – Eb = 0, donc les effets de la réactance d’induit sont équilibrés et il n’y a aucune
opposition au couple moteur.
Conséquence : la puissance nécessaire à la rotation de l’alternateur bis rotors en charge ne dépasse pas
celle nécessaire aux pertes. Le courant induit qui a pour origine la variation temporelle ∆t du flux
inducteur ∆Φ, est maintenu par le couple moteur qui ne rencontre aucune opposition.
C’est un cas de sur-unité apparente, car des phénomènes d’équilibrage sont en action comme dans
les cas incontestables observés. Ce n’est pas le couple moteur, compensateur des pertes qui assure
l’équilibrage des effets de la réactance d’induit ; mais le courant d’utilisation induit générateur de cette
réactance d’induit. Bien que je ne suis pas limité par le temps ni par la distance, cela m’autorise à
utiliser l’apparent gain d’énergie effectivement disponible comme pendant l’espace temps ∆t des cas
incontestables observés de sur-unité virtuelle.
Le rendement classique d’un alternateur est de 80%, (80/20+80) ou (80/100).
Donc (80%+20%) d’énergie à fournir pour obtenir 80% d’énergie en sortie.
Pour l’assemblage proposé avec les mêmes phénomènes physiques je fournie 20% pour obtenir 80%.
Ce qui détermine un rendement de 80/20 = 400%
Ce rendement est obtenu en respectant la loi de la thermodynamique comme dans les cas
d’observations incontestables de sur-unité virtuelle.
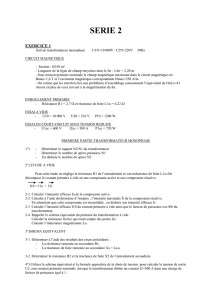
A B
Eb = Ea sur les engrenages de l’axe moteur Ea
Le couple perpendiculaire au
plan de rotation est compensé sur
les paliers de l’axe moteur.
Couple
moteur
2ω ω
Effet (E) de la réactance
d’induit répartie en Ea + Eb = E
 6
7
6
7
1
/
7
100%