9 travail et energie www stsmsth blogspot com

Travail et énergie
A.FIZAZI Univ-BECHAR LMD1/SM_ST
195
1/ TRAVAIL ET PUISSANCE ( ) :
La puissance :
Définition :Soit
M
un point matériel de vitesse
v
par rapport au
référentiel
R
.La puissance de la force
F
àlaquelle est soumise
M
est
définie à chaque instant par la relation 6.1 :
.
-1
watt(W) P
NF PFv
m.s v
=
(6.1)
Le travail :
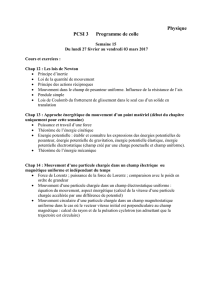
Définition :le travail de la force
F
entre l’instant
t
,quand le point
matériel
M
est en
M
de position
OM r
=
,et l’instant
tdt
+
quand
M
est en
'
M
de position
OM'=r+dr
,est la grandeur exprimée en joule :
.
dW P dt
=(6.2)
D’après la définition de la vitesse, on a :
''.
OM OM MM dr v dt
===
Ainsi on en déduit l’expression du travail de la force
F
pour un déplacement
élémentaire
d
:
dW = F.dr
(6.3)
A
B
r
F
T
F
M
T
v
O
'
M
C
Fig 6.1
Remarquons que le travail est un produit scalaire du vecteur force et du vecteur
déplacement.
..cos
dW F dr
=
(6.4)
Notons que .cos
T
FF
=
.Si on pose
dr ds
=
,on obtient alors une nouvelle
expression du travail qui est :
VI/TRAVAIL ET ENERGIE
011123111411156 781119111:11156
:::676067+%/2*6327&20
:::676067+%/2*6327&20

Travail et énergie
A.FIZAZI Univ-BECHAR LMD1/SM_ST
196
.
T
dW F ds
=(6.5)
Cela veut dire que le travail est égal au produit de déplacement élémentaire par la
composante de la force suivant la direction du déplacement.
Pour un déplacement total de
A
(à l’instant
A
t
) à
B
(à l’instant
B
t
)tout au long de la
courbe
C
, on obtient l’expression :
..
BB
T
AA
WFdrFds
==
(6.6)
Dans le cas particulier où la force
F
est constante en module et en sens, et le
corps se déplaçant suivant une trajectoire rectiligne, le travail de cette force
est :
..
BB
T
AA
FF W FdsFds WFs
====
(6.7)
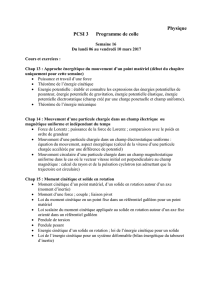
La force qui ne travail pas est la force perpendiculaire au déplacement
(
/2
=
).
Par exemple :Le corps représenté sur la figure 6.2 est soumis à quatre forces
constantes, et se déplace sur un plan horizontal.
P
F
f
N
C
v
N
F
Soit
s
le déplacement du corps, et donc de chacune des forces :
Le travail de la force
F
:
..cos
F
WFs
=
Le travail de la force résistante
f
:
.
f
Wfs
=
Le travail du poids
P
:
0
P
W
=
Le travail de la force normale
N
:
0
N
W
=
Dans le mouvement circulaire, le travail de la force normale est nul (figure 6.3).
Si
,,
xyz
FFF
sont les composantes rectangulaires de la force
F
,et
,,
dx dy dz
les composantes rectangulaires du vecteur de déplacement
élémentaire
dr
,alors :
.(. . .)
BB
xyz
AA
W F dr F dx F dy F dz
== ++
(6.8)

Travail et énergie
A.FIZAZI Univ-BECHAR LMD1/SM_ST
197
Cas de plusieurs forces : Si le corps est soumis à plusieurs forces
123
, , ........ ,
n
FF F F
dont la résultante est
R
F
,le travail effectué par ces
forces est égal au travail de la résultante :
123
123
..............
. . . .......... .
.
n
n
R
dW dW dW dW dW
dW F dr F dr F dr F dr
dW F dr
=+++ +
=+++ +
=
(6.9)
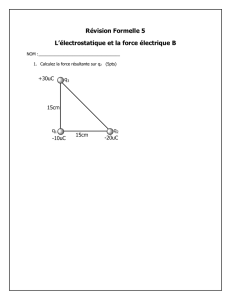
Exemple 6.1 :
Calculer le travail nécessaire pour allonger un ressort suspendu verticalement, comme
indiqué sur la figure (6.4), de
3
cm
sans aucune accélération, sachant que la constante de
raideur est
1
50 .
kNm
=.
Réponse :
2
0
2
1
..
2
2.25.10
x
Fkx dW kxdx W kx
WJ
===
=
Exemple 6.2 :
Une force
2( )
FtN
=
agit sur une particule de masse
2
mkg
=
.Calculer le travail
effectué par cette force durant la première seconde, sachant que la particule était
initialement au repos.
Réponse :
Partant de l’expression du travail :
.
WFdx
=
Dans ce cas la force est une fonction du temps et non du déplacement. Il est
indispensable d’exprimer le déplacement en fonction du temps. Calculons d’abord la
vitesse en fonction du temps :
1
2
0
1
22.. )
2
-1
dv t
F=ma F=m t v dt v t (m.s
dt m
===
Exprimons le déplacement en fonction du temps :
22
11
22
dx
vtdxtdt
dt
== =
Revenons à l’expression du travail et remplaçons
dx
par l’expression à laquelle nous
sommes parvenue :
1
24
00
11
.2.
24
x
W F dx t t dt W t W=0.25J
== =
Exemple 6.3 :
Une particule est soumise à la force
2
2
Fxyixj
=+
.Calculer le travail effectué par
la force
F
quand la particule se déplace du point
(0,0)
au point
(2,0)
suivant une droite.
Fig 6.4
F
T
+
:::676067+%/2*6327&20
:::676067+%/2*6327&20

Travail et énergie
A.FIZAZI Univ-BECHAR LMD1/SM_ST
198
Réponse :
D’après les données nous voyons que la particule se déplace parallèlement à l’axe
OX
, et par conséquent
00
ydy
==
.
De là on peut calculer facilement le travail effectué :
2
(. .) (2.0. .0) 0
xy
W F dx F dy x dx x W
=+= +=
Ceci était prévisible puisque la force est perpendiculaire au vecteur déplacement :
2.
0
.
Fxj Fdr W
dr dx i
=
=
=
2/ ENERGIE CINETIQUE(IJKL )
Nous avons vu que T
dW F ds
=
. Partant de cette expression on peut déduire ce qui
suit :
.
T
dv ds
dW F ds m ds dW m dv dW mvdv
dt dt
== ==(6.10)
Intégrons l’expression 6.10 du travail élémentaire, et tirons la définition de l’énergie
cinétique :
22
11
22
B
BA
A
Wmvdv W mv mv
==
(6.11)
Où
a
v
est la vitesse du mobile au point
A
et
B
v
sa vitesse au point
B
.
Définition :L’énergie cinétique d’un point matériel de masse
m
,de vitesse
instantanée
v
est l’expression :
2
1
2
c
Emv
=(6.12)
Et puisque
pmv
=
,onpeut écrire aussi :
2
2
c
p
E
m
=(6.13)
Théorème de l’énergie cinétique( ):
Enoncé : «La variation de l’énergie cinétique d’un point matériel entre
deux instants est égale au travail de la résultante de toutes les forces qui lui
sont appliquées entre ces deux instants »
cic
i
WE WE
= =
(6.14)
Exemple 6.4 :
Quelle est la vitesse initiale
0
v
orientée verticalement vers le haut, communiquée à un
corps pour qu’il atteigne une hauteur
h
en dessus de la surface de la terre ? (On néglige tous
les frottements).

Travail et énergie
A.FIZAZI Univ-BECHAR LMD1/SM_ST
199
Réponse :
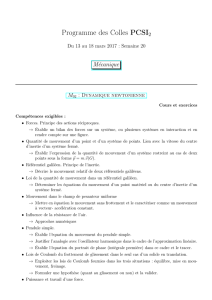
La seule force qui agit sur le corps est son poids
P
:
z
h
Z
0
v
=
0
v
P
R
X
()
Mt
O
00
2
.
T
mM
Pmg G
R
==
2
T
mM
PmgG
z
==
22
0
22
00
PgR R
g g ; g=-g.k
Pg z z
===
z
On applique le théorème de l’énergie cinétique :
c
WE
=
22
0
11
..
22
Rh Rh
RR
mv mv P dz = mg dz
++
=
Le corps atteint sa hauteur maximale quand
0
v
=
,d’où :
2
22
00 0
2
20
00 0
11
0..
2
12.
.
Rh
Rh
R
R
Rh
R
R
mv m g dz g R
zz
gRh
vgR v
zRh
+
+
+
==
==
+
3/ LES FORCES CONSERVATIVES OU DERIVANT D’UN POTENTIEL
(QRSTQJ UV RWX SQR Y Z[L )
Définition :On dit d’une force qu’elle est conservative (ou conservatrice), ou
dérivant d’un potentiel, si son travail est indépendant du chemin suivi, quelque
soit le déplacement probable entre le point de départ et le point d’arrivée.
Si la trajectoire
C
est fermée, alors :
00
C
C , W= F.dr W
==
(6.15)
Exemple du poids :Dans un système de coordonnées cartésiennes, où
OZ
est la
verticale orientée vers le haut, on a :
PF mgk
==
(6.16)
En utilisant l’expression du déplacement élémentaire en coordonnées
cartésiennes,
on écrit :
...
dr dx i dy j dz k
=++
On peut en déduire : .
dW F dr mgdz
==
.En intégrant cette dernière
expression, on se rend compte que le travail pour un déplacement entre deux
Z
O
k
P
g
Fig 6.6
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%