MESURE DE DISTANCE PAR ULTRASONS

MESURE DE DISTANCE
PAR ULTRASONS
A l p h o n s e D E L A P O R T E / A m i n e N A J A R
P r o j e t P R - 2001
S e m e s t r e 2
2013 - 2014

Page 2
Table des matières
I- Introduction .......................................................................................................................... 4
1) Cahier des charges ...................................................................................................................... 5
2) Schéma du détecteur .................................................................................................................. 6
3) Test préliminaire ........................................................................................................................ 7
II. Émission du signal ................................................................................................................ 9
1) Circuit d’émission ........................................................................................................................ 9
2) Nomenclature des composants ..................................................................................................... 9
3) Génération du signal .................................................................................................................. 10
4) Amplification du signal ............................................................................................................... 11
5) Tests .......................................................................................................................................... 12
III. Réception du signal ........................................................................................................... 13
1) Circuit de réception .................................................................................................................... 13
2) Amplification du signal ............................................................................................................... 13
3) Redressement du signal .............................................................................................................. 14
4) Nomenclature des composants ................................................................................................... 14
5) Tests .......................................................................................................................................... 15
IV. Comparateur à Hystérésis ................................................................................................. 17
1) Explication du circuit .................................................................................................................. 17
2) Tests : ........................................................................................................................................ 18
3) Nomenclature des composants : ................................................................................................. 18
V. Oscillateur ......................................................................................................................... 18
1) Explication du circuit .................................................................................................................. 18
2) Tests .......................................................................................................................................... 20
3) Nomenclature des composants : ................................................................................................. 21
VI. Volume ............................................................................................................................. 22
1) Explication du circuit : ................................................................................................................ 22
2) Nomenclature des composants : ................................................................................................. 22
VII. Interrupteur ..................................................................................................................... 23
1) Explication du circuit : ................................................................................................................ 23
2) Nomenclature des composants : ................................................................................................. 23
VIII. Amplificateur de Puissance ............................................................................................. 24
1) Explication du circuit .................................................................................................................. 24
2) Test ............................................................................................................................................ 26
3) Nomenclature des composants : ................................................................................................. 26
IX. Affichage sur l’écran LCD ................................................................................................... 27
1) Branchement de l’écran LCD : ..................................................................................................... 27
2) Organigramme : ......................................................................................................................... 27
3) Code source :.............................................................................................................................. 28

Page 3
4) Tests : ........................................................................................................................................ 31
X. Schémas et Nomenclature .................................................................................................. 33
1) Schéma simplifié du circuit ......................................................................................................... 33
2) Schéma détaillé du circuit ........................................................................................................... 34
XI. Conclusion ........................................................................................................................ 35
XII. Bibliographie .................................................................................................................... 36

Page 4
I- Introduction
Les ultrasons sont des vibrations mécaniques, de même nature que le son, mais inaudibles
à l'oreille humaine car leur fréquence est supérieure à 20kHz. Ces ondes sont utilisées
dans plusieurs technologies telles que les radars et les sonars.
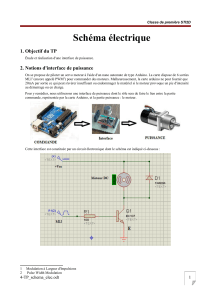
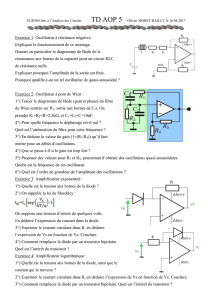
Un télémètre à ultrasons, dont le schéma synoptique est représenté à la figure 1,
fonctionne selon le principe du radar : une onde est émise en direction de l’objet dont on
veut connaître la distance. L’écho est ensuite détecté par le récepteur incorporé du
télémètre. Connaissant la vitesse de propagation du son (340 mètres par seconde), il
devient facile de déduire la distance parcourue par l’onde. A l’aide de notre FPGA
(Arduino), on peut alors afficher cette distance sur un écran et/ou utiliser cette donnée
numérique pour produire un son. La vitesse de celui-ci qui deviendra de plus en plus
rapide au fur et à mesure que le détecteur se rapproche de l’obstacle. Une application de
ce principe consiste en les radars de recul.
Figure 1 : Principe du détecteur de proximité.

Page 5
1) Cahier des charges
Avant de commencer tout travail, il convient de se fixer un cahier des charges afin de
cerner précisément les objectifs de notre projet. Le cahier des charges nous impose les
conditions suivantes :
o Durée de réalisation : vingt-huit semaines
o Performance : le télémètre doit mesurer une distance de quelques décimètres
o Précision : l’utilisateur est alerté par un son audible et répété à une fréquence d’environ
0.5 Hz pour un obstacle à 30 cm et répété à une fréquence de 5 Hz pour un obstacle à 5
cm.
o Alimentation : une alimentation générant du ± 5 V fournira les tensions nécessaires
pour le montage extérieur à l’Arduino.
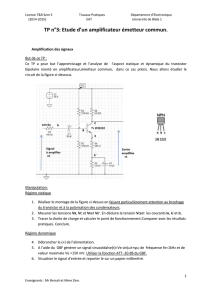
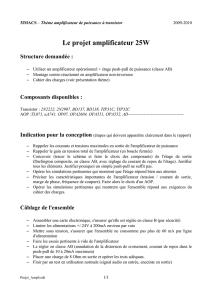
o Principe de fonctionnement : la mesure à l’aide du télémètre se fait par le calcul d’un
déphasage entre l’émission et la réception de salves, selon la méthode précisée à la
figure 2.
Figure 2 : Principe de Mesure
o Prototypage du détecteur : plaquette SK10.
o Réalisation du détecteur : circuit imprimé dans lequel seront placés tous les composants.
La relation entre la durée d’aller-retour de l’ultrason t et sa distance D par rapport à l’obstacle
est donnée par la relation suivante, V étant la vitesse de l’ultrason dans l’air :
La distance est divisée par 2 car l’impulsion fait un aller-retour.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%