Le cas o`u l’´energie totale E est E

Energie cinétique et potentielle
autre aspect géométrique
On peut aussi expliciter l’aspect géométrique en montrant que le temps est un paramètre qui
peut être déduit de la trajectoire. Par exemple considérons la conservation de l’énergie pour
un problème à une dimension:
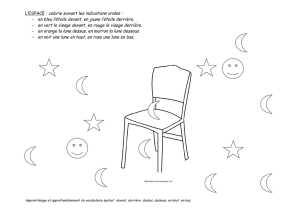
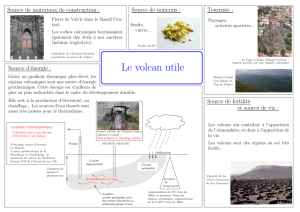
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
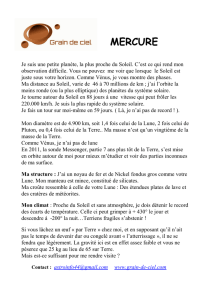
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103
Le temps peut être déterminer par l’intégrale:
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103

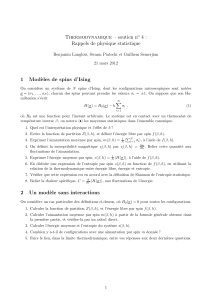
Energie cinétique et potentielle autre
aspect géométrique
Cette intégrale permet de dire qu’il est impossible d’atteindre un point d’équilibre instable et
de s’y arrêter en un temps fini.
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103
Soit x un point d’équilibre instable
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103
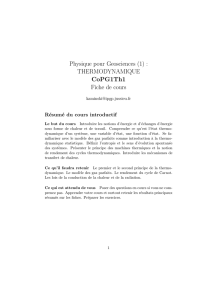
Energie potentielle de telle
sorte que la vitesse est nulle
par conservation de l’énergie
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103

Energie cinétique et potentielle autre
aspect géométrique
Cette intégrale permet de dire qu’il est impossible d’atteindre un point d’équilibre instable et
de s’y arrêter en un temps fini.
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103
dans le voisinage de car le point est instable
Le cas o`u l’´energie totale Eest E2s’analyse de la mˆeme fa¸con. Si ce n’est que cette fois l’´equation qui
d´etermine les points d’arrˆet o`u l’´energie cin´etique est nulle :E2=U(r)pr´esente plusieurs solutions r0
1,r3;
r4,r5et r6.On reconnaˆıt une situation analogue `a la pr´ec´edente dans le cas de r6:une trajectoire ouverte
qui repart vers l’infini et qui s’approche au plus `a r6du centre. Une autre possibilit´e de trajectoire s’o↵re
maintenant `a nous :des trajectoires ferm´ees o`u rest born´e par exemple :r4rr5.La vitesse s’annule
en r4et r5et la force est r´epulsiveen r4et attractiveen r5puisque les pentes de U(r)sontrespectivement
positiveet n´egative. Pour la valeur de l’´energie ´egale `a E3,seule la trajectoire ferm´ee r00
1rr2est
autoris´ee (r0
1et r00
1sonttrop proches de r1, pour la clart´e du graphique ils ont ´et´e omis).
Enfin, les points marqu´es ⌦ou ?sontdes points o`u la trajectoire est r´eduite aun point. Il s’agit donc
de points o`u seule la situation immobile est autoris´ee. Ce sontles points o`u le potentiel U(r)pr´esente un
extremum. On appelle ces positions des positions d’´equilibre. La force totale agissantsur le point y est en
e↵et nulle (puisque la d´eriv´ee du potentiel est nulle). Ces ´equilibres sontqualifi´es de stables ⌦ou instables
?en fonction du comportementde la force au voisinage des points d’´equilibre. Si la force ram`ene le point
vers la position d’´equilibre alors la position est dite stable et U00(r)>0. Si la force continue d’´eloigner le
pointde la position, alors l’´equilibre est dit instable et U00(r)<0. En premi`ere approximation, le potentiel
et la force qui en r´esulte peuvents’obtenir par le d´eveloppementen s´erie du potentiel autour du pointen
question :
6-65 U(r)⇡U(r⌦) + 1
2(rr⌦)2U00(r⌦) + . . .
F(r)⇡ (rr⌦)U00(r⌦) + ...
En premi`ere approximation le comportementau voisinage des points d’´equilibre stable est le comportement
d’un oscillateur harmonique. La constante de rappel ´equivalente est donn´ee par la d´eriv´ee seconde du
potentiel au pointd’´equilibre U00(r⌦).
Aspects g´eom´etrique II
Une autre fa¸con d’expliciter l’aspect g´eom´etrique est de montrer que le temps test un param`etre qui
peut ˆetre d´eduit de la trajectoire. Si nous repartons de la conservation de l’´energie pour un probl`eme `a une
dimension, on peut ´ecrire :
6-66 1
/
2mv2=EU(x)!1
/
2m✓dx
dt ◆2
= (EU(x)) !rm
2
dx
pEU(x)=dt
Le temps est donc d´etermin´e par l’int´egrale :
6-67 t2t1=rm
2Zx2
x1
dx
pEU(x)
Cette int´egrale nous permet aussi de dire qu’il est impossible d’atteindre un pointd’´equilibre instable et de
s’y arrˆeter en un temps fini. En e↵et si x⌦est le pointd’´equilibre instable et que l’on choisit comme ´energie
totale la valeur de l’´energie potentielle en ce pointE=U(x⌦)de telle sorte que la vitesse yest nulle en
vertu de la conservation d’´energie, alors le temps n´ecessaire pour yarriver est de la forme :
6-68 t⌦t1=rm
2Zx⌦
x1
dx
pEU(x)⇡rm
2Zx⌦
x1
dx
pEU(x⌦)1
/
2U00(x⌦)(xx⌦)2
Th´eor`emes/ ´energie cin´etique - potentielle 103
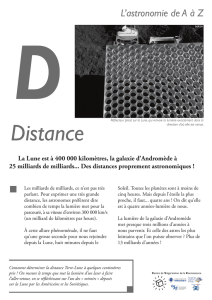
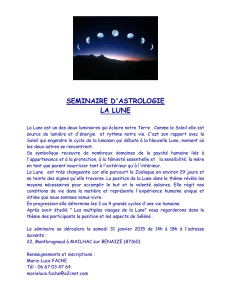
en partantx1suffisammentpr`es de x⌦.De plus le caract`ere instable nous impose que U00 <0, ce qui nous
permet d’affirmer :
6-69 t⌦t1⇡rm
2Zx⌦
x1
dx
p1
/
2|U00(x⌦)||x⌦x|=rm
|U00(x⌦)|Zx⌦
x1
dx
|x⌦x|
Cette expression diverge logarithmiquement. Autrementdit, le pointxse rapporche de x⌦exponen-
tiellementlentement avec un temps caract´eristique d´efini par U00 et la masse :
6-70 |xx⌦|⇡et/⌧⌧=rm
|U00(x⌦)|
Th´eor`emes/ ´energie cin´etique - potentielle 104
en partantx1suffisammentpr`es de x⌦.De plus le caract`ere instable nous impose que U00 <0, ce qui nous
permet d’affirmer :
6-69 t⌦t1⇡rm
2Zx⌦
x1
dx
p1
/
2|U00(x⌦)||x⌦x|=rm
|U00(x⌦)|Zx⌦
x1
dx
|x⌦x|
Cette expression diverge logarithmiquement. Autrementdit, le pointxse rapporche de x⌦exponen-
tiellementlentement avec un temps caract´eristique d´efini par U00 et la masse :
6-70 |xx⌦|⇡et/⌧⌧=rm
|U00(x⌦)|
Th´eor`emes/ ´energie cin´etique - potentielle 104
en partantx1suffisammentpr`es de x⌦.De plus le caract`ere instable nous impose que U00 <0, ce qui nous
permet d’affirmer :
6-69 t⌦t1⇡rm
2Zx⌦
x1
dx
p1
/
2|U00(x⌦)||x⌦x|=rm
|U00(x⌦)|Zx⌦
x1
dx
|x⌦x|
Cette expression diverge logarithmiquement. Autrementdit, le pointxse rapporche de x⌦exponen-
tiellementlentement avec un temps caract´eristique d´efini par U00 et la masse :
6-70 |xx⌦|⇡et/⌧⌧=rm
|U00(x⌦)|
Th´eor`emes/ ´energie cin´etique - potentielle 104
en partantx1suffisammentpr`es de x⌦.De plus le caract`ere instable nous impose que U00 <0, ce qui nous
permet d’affirmer :
6-69 t⌦t1⇡rm
2Zx⌦
x1
dx
p1
/
2|U00(x⌦)||x⌦x|=rm
|U00(x⌦)|Zx⌦
x1
dx
|x⌦x|
Cette expression diverge logarithmiquement. Autrementdit, le pointxse rapporche de x⌦exponen-
tiellementlentement avec un temps caract´eristique d´efini par U00 et la masse :
6-70 |xx⌦|⇡et/⌧⌧=rm
|U00(x⌦)|
Th´eor`emes/ ´energie cin´etique - potentielle 104

Energie cinétique et potentielle autre
aspect géométrique
On se rapproche du point d’équilibre instable exponentiellement lentement avec un temps
caractéristique qui dépend de la masse de l’objet et de la dérivée seconde du potentiel.
en partantx1suffisammentpr`es de x⌦.De plus le caract`ere instable nous impose que U00 <0, ce qui nous
permet d’affirmer :
6-69 t⌦t1⇡rm
2Zx⌦
x1
dx
p1
/
2|U00(x⌦)||x⌦x|=rm
|U00(x⌦)|Zx⌦
x1
dx
|x⌦x|
Cette expression diverge logarithmiquement. Autrementdit, le pointxse rapporche de x⌦exponen-
tiellementlentement avec un temps caract´eristique d´efini par U00 et la masse :
6-70 |xx⌦|⇡et/⌧⌧=rm
|U00(x⌦)|
Th´eor`emes/ ´energie cin´etique - potentielle 104
en partantx1suffisammentpr`es de x⌦.De plus le caract`ere instable nous impose que U00 <0, ce qui nous
permet d’affirmer :
6-69 t⌦t1⇡rm
2Zx⌦
x1
dx
p1
/
2|U00(x⌦)||x⌦x|=rm
|U00(x⌦)|Zx⌦
x1
dx
|x⌦x|
Cette expression diverge logarithmiquement. Autrementdit, le pointxse rapporche de x⌦exponen-
tiellementlentement avec un temps caract´eristique d´efini par U00 et la masse :
6-70 |xx⌦|⇡et/⌧⌧=rm
|U00(x⌦)|
Th´eor`emes/ ´energie cin´etique - potentielle 104

Energie cinétique et potentielle
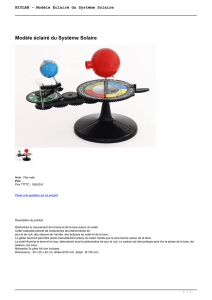
Champ de gravitation
Pour la gravitation locale nous avons vu que:
alors on asuccessivement :
6-44
P=!
f·!
v=✓@U
@x!
1x+@U
@y!
1y+@U
@z!
1z◆•˙x!
1x+ ˙y!
1y+ ˙z!
1z
=@U
@x
dx
dt @U
@y
dy
dt @U
@z
dz
dt
=d
dtU(x, y, z)
Pdt =dT=d U(x, y, z)
ce qui correspond `a ce que l’on d´esirait. Le th´eor`eme de l’´energie cin´etique devientalors :
6-45 1
/
2mv2(t2)1
/
2mv2(t1) = Zt2
t1d U(x, y, z) = U(x2, y2, z2) + U(x1, y1, z1)
et ne d´epend plus de la trajectoire qui `a permis le passage du pointP1={x1, y1, z1}au pointP2=
{x2, y2, z2}.
Les forces qui peuvents’´ecrire sous cette forme sontdites forces conservatives et la fonction U(x, y, z)
s’appelle l’´energie potentielle correspondante `a la force !
f.L’op´erateur !
rqui permet `a partir d’une fonction
scalaire U(x, y, z)(on pr´ef´erera dire d’un champ scalaire) de passer `a une force !
fest appell´e gradient.
L’expression (6-45)peut encore s’´ecrire sous la forme d’une conservation :
6-46 1
/
2mv2(t2) + U(x2, y2, z2) = 1
/
2mv2(t1) + U(x1, y1, z1)def
=E
qui nous indique l’invarianceau cours du temps de la somme de l’´energie cin´etique et de l’´energie potentielle.
Cette somme est appel´ee ´energie totale du syst`eme.
Les forces fondamentales de la physique sont conservatives ;
elles d´erivent donc d’un potentiel U.
Pour la gravitation locale, nous avons :
6-47 !
f=m!
g=mg!
1z=!
rU> U(x, y, z) = mgz
et la conservation de l’´energie totale s’´ecrit donc :
6-48 1
/
2mv2+mgz=E
Gravitation universelle
Nous pouvons ´evaluer le potentiel pour chaque force rencontr´ee. Par exemple, pour la gravitation universelle,
la force qui s’exerce de Asur Best donn´ee par
6-49 !
FA/B =G MAMB
|AB|3!
BA
Dans un syst`eme inertiel de r´ef´erence centr´e en O,nous pouvons calculer la puissance au pointB:
6-50 PB=!
FA/B·!
vB=G MAMB
|AB|3✓!
BA·d
dt!
OB◆
Th´eor`emes/ ´energie cin´etique - potentielle 99
alors on asuccessivement :
6-44
P=!
f·!
v=✓@U
@x!
1x+@U
@y!
1y+@U
@z!
1z◆•˙x!
1x+ ˙y!
1y+ ˙z!
1z
=@U
@x
dx
dt @U
@y
dy
dt @U
@z
dz
dt
=d
dtU(x, y, z)
Pdt =dT=d U(x, y, z)
ce qui correspond `a ce que l’on d´esirait. Le th´eor`eme de l’´energie cin´etique devientalors :
6-45 1
/
2mv2(t2)1
/
2mv2(t1) = Zt2
t1d U(x, y, z) = U(x2, y2, z2) + U(x1, y1, z1)
et ne d´epend plus de la trajectoire qui `a permis le passage du pointP1={x1, y1, z1}au pointP2=
{x2, y2, z2}.
Les forces qui peuvents’´ecrire sous cette forme sontdites forces conservatives et la fonction U(x, y, z)
s’appelle l’´energie potentielle correspondante `a la force !
f.L’op´erateur !
rqui permet `a partir d’une fonction
scalaire U(x, y, z)(on pr´ef´erera dire d’un champ scalaire) de passer `a une force !
fest appell´e gradient.
L’expression (6-45)peut encore s’´ecrire sous la forme d’une conservation :
6-46 1
/
2mv2(t2) + U(x2, y2, z2) = 1
/
2mv2(t1) + U(x1, y1, z1)def
=E
qui nous indique l’invarianceau cours du temps de la somme de l’´energie cin´etique et de l’´energie potentielle.
Cette somme est appel´ee ´energie totale du syst`eme.
Les forces fondamentales de la physique sont conservatives ;
elles d´erivent donc d’un potentiel U.
Pour la gravitation locale, nous avons :
6-47 !
f=m!
g=mg!
1z=!
rU> U(x, y, z) = mgz
et la conservation de l’´energie totale s’´ecrit donc :
6-48 1
/
2mv2+mgz=E
Gravitation universelle
Nous pouvons ´evaluer le potentiel pour chaque force rencontr´ee. Par exemple, pour la gravitation universelle,
la force qui s’exerce de Asur Best donn´ee par
6-49 !
FA/B =G MAMB
|AB|3!
BA
Dans un syst`eme inertiel de r´ef´erence centr´e en O,nous pouvons calculer la puissance au pointB:
6-50 PB=!
FA/B·!
vB=G MAMB
|AB|3✓!
BA·d
dt!
OB◆
Th´eor`emes/ ´energie cin´etique - potentielle 99
la conservation de l’énergie s’écrit donc:
Nous avons vu la force universelle de gravitation:
alors on asuccessivement :
6-44
P=!
f·!
v=✓@U
@x!
1x+@U
@y!
1y+@U
@z!
1z◆•˙x!
1x+ ˙y!
1y+ ˙z!
1z
=@U
@x
dx
dt @U
@y
dy
dt @U
@z
dz
dt
=d
dtU(x, y, z)
Pdt =dT=d U(x, y, z)
ce qui correspond `a ce que l’on d´esirait. Le th´eor`eme de l’´energie cin´etique devientalors :
6-45 1
/
2mv2(t2)1
/
2mv2(t1) = Zt2
t1d U(x, y, z) = U(x2, y2, z2) + U(x1, y1, z1)
et ne d´epend plus de la trajectoire qui `a permis le passage du pointP1={x1, y1, z1}au pointP2=
{x2, y2, z2}.
Les forces qui peuvents’´ecrire sous cette forme sontdites forces conservatives et la fonction U(x, y, z)
s’appelle l’´energie potentielle correspondante `a la force !
f.L’op´erateur !
rqui permet `a partir d’une fonction
scalaire U(x, y, z)(on pr´ef´erera dire d’un champ scalaire) de passer `a une force !
fest appell´e gradient.
L’expression (6-45)peut encore s’´ecrire sous la forme d’une conservation :
6-46 1
/
2mv2(t2) + U(x2, y2, z2) = 1
/
2mv2(t1) + U(x1, y1, z1)def
=E
qui nous indique l’invarianceau cours du temps de la somme de l’´energie cin´etique et de l’´energie potentielle.
Cette somme est appel´ee ´energie totale du syst`eme.
Les forces fondamentales de la physique sont conservatives ;
elles d´erivent donc d’un potentiel U.
Pour la gravitation locale, nous avons :
6-47 !
f=m!
g=mg!
1z=!
rU> U(x, y, z) = mgz
et la conservation de l’´energie totale s’´ecrit donc :
6-48 1
/
2mv2+mgz=E
Gravitation universelle
Nous pouvons ´evaluer le potentiel pour chaque force rencontr´ee. Par exemple, pour la gravitation universelle,
la force qui s’exerce de Asur Best donn´ee par
6-49 !
FA/B =G MAMB
|AB|3!
BA
Dans un syst`eme inertiel de r´ef´erence centr´e en O,nous pouvons calculer la puissance au pointB:
6-50 PB=!
FA/B·!
vB=G MAMB
|AB|3✓!
BA·d
dt!
OB◆
Th´eor`emes/ ´energie cin´etique - potentielle 99
 6
7
8
9
10
11
6
7
8
9
10
11
1
/
11
100%