DM1 DYNAMIQUE BRAS DE ROBOT A MUSCLES ARTIFICIELS PSI Les Ulis

PSI Les Ulis
DM1
CI
8
:
Dynamique des systèmes
Sciences Industrielles pour l’Ingénieur 1/4
Figure
1
:
Fig1
DM1 DYNAMIQUE
BRAS DE ROBOT A MUSCLES ARTIFICIELS1
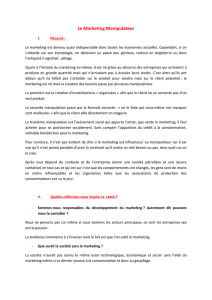
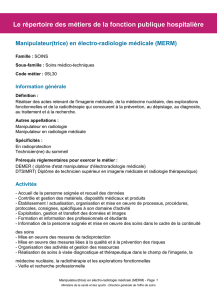
I PRESENTATION DU SUJET
L’utilisation de l’énergie pneumatique pour
l’actionnement des manipulateurs présente des
propriétés qui s’avèrent intéressantes pour les
applications en milieu hostile ou du type
biomécanique.
L’étude proposée concerne un manipulateur à
muscles artificiels. Ce dernier, représenté sur
les figures 1 et 2, est un manipulateur à
structure anthropomorphique à 7 degrés de
liberté activés par des paires de muscles
artificiels montés en opposition.
II ETUDE DU
MANIPULATEUR
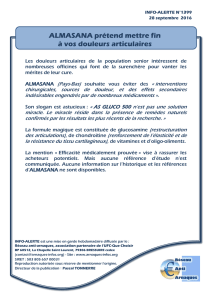
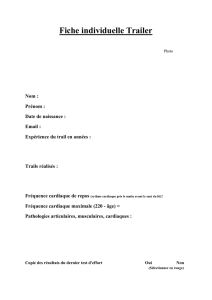
II.1 Modélisation
Pour simplifier l’étude, on se limite
à un manipulateur dont la chaîne
cinématique ouverte est présentée
sur les figures 3 et 4. La
configuration du manipulateur est
fixée par les trois coordonnées
articulaires
zet
ϕ
θ
,
qui fixent la
position du repère
),,,(
33333
zyxOR
lié à l’organe
terminal, par rapport au repère
),,,(
00010
zyxOR
lié à la base du
manipulateur.
Le vecteur position du point
3
O
est
défini dans l’espace opérationnel
par ses coordonnées dans le repère
0
R
telles que :
00000031
zzyyxxOO
r
r
r
++=
.
1
CCP 2001
Figure 2 : Schéma cinématique du manipulateur

PSI Les Ulis
DM1
CI
8
:
Dynamique des systèmes
Sciences Industrielles pour l’Ingénieur 2/4
L’accélération de la pesanteur
g
r
est telle que
0
zgg
r
r
−=
et le repère
),,,(
00010
zyxOR
sera considéré
comme galiléen. L’optimisation du volume atteignable par l’organe terminal a conduit à adopter les
longueurs projetées dans le plan
),,(
001
yxO
r
r
avec
LOOOO ==
3221
Le bras 1 est en liaison pivot sans frottement par rapport à la base fixe du manipulateur.
Il est
soumis à un couple
zC
r
1
par l'intermédiaire d'un actionneur dont le corps est solidaire de la base fixe.
L'avant-bras 2 est soumis à un couple
zC
r
12
par l'intermédiaire d'un actionneur dont le corps est
solidaire du bras 1. Par construction, les débattements admissibles sont tels que les angles
2
0
π
θ
<<
et
2
2
3
π
ϕ
π
<<−
.
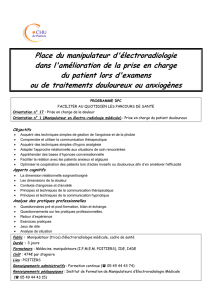
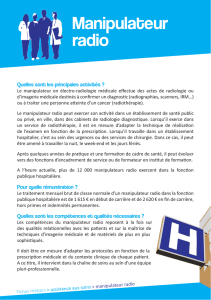
II.2 Modèle géométrique
En fonction de la tâche à réaliser, le calculateur central du manipulateur établit une trajectoire dans
l’espace opérationnel qu’il doit convertir dans l’espace articulaire afin d’élaborer les consignes à
émettre vers les boucles locales de chaque actionneur. Le travail abordé dans cette question est
destiné à :
• établir une relation liant les coordonnées opérationnelles (x
0
, y
0
, z
0
), en fonction des
coordonnées articulaires (θ, ϕ, z). On définit alors le modèle géométrique direct.
• inverser cette relation et établir une relation entre les coordonnées articulaires (θ, ϕ, z) en
fonction des coordonnées opérationnelles (x
0
, y
0
, z
0
). On définit alors le modèle géométrique
inverse.
II.2.1 Modèle géométrique direct
Q1/
Soit
O O x t x y t y z t z
1 3 0 0 0 0 0 0
= + +( ) ( ) ( )
r
r
r
. Calculer les coordonnées opérationnelles x
0
, y
0
et
z
0
en fonction des coordonnées articulaires θ, ϕ et z.
Figure 3 : Paramétrage géométrique du manipulateur

PSI Les Ulis
DM1
CI
8
:
Dynamique des systèmes
Sciences Industrielles pour l’Ingénieur 3/4
II.2.2 Modèle géométrique inverse
Q2/
Montrer que les coordonnées articulaires θ, ϕ et z en fonction de x
0
, y
0
, z
0
et L s’écrivent :
2 2
0 0
cos
2 2
x y
L
ϕ
+
=
et
0
0
arctan
2
y
x
ϕ
θ
= −
.
On rappelle que
cos cos cos cosa b a b a b
+ =
+
−
2
2
2
et
sin sin sin cosa b a b a b
+ =
+
−
2
2
2
.
II.2.3 Application
Q3/
Ecrire les équations du modèle géométrique inverse si le point O
3
suit une trajectoire
rectiligne selon l’axe
( , )O x
1 0
r
Valider ce résultat graphiquement à l’aide d’un schéma ; définir
alors la course des actionneurs dans le cas où
L O O L
< <
1 3
3
2
.
II.3 Elaboration du modèle cinématique - dimensionnement en vitesse
Comme pour le modèle géométrique, le travail abordé dans cette question permet d'établir un modèle
cinématique direct qui lie les vitesses opérationnelles aux vitesses articulaires. Dimensionner les
actionneurs en vitesse requiert la connaissance des vitesses articulaires en fonction des vitesses
opérationnelles (inversion du modèle cinématique).
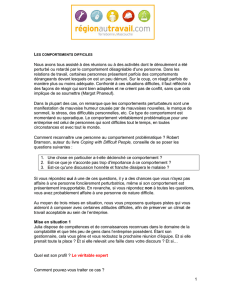
Le robot étudié a une longueur de bras L = 0,5 m. On se place dans la même configuration de
fonctionnement qu'à la Q3/, où le centre de la pince O
3
suit toujours une trajectoire rectiligne selon
l'axe
( , )O x
1 0
r
telle que, à t = 0,
mOO 5,0
31
=
et à t = 1 s,
mOO 75,0
31
=
avec la loi du mouvement
donnée figure 5.
Q4/
Dériver simplement le modèle géométrique inverse obtenu en Q3/ et déterminer les
vitesses articulaires
•
θ
,
•
ϕ
et
•
z
en fonction des grandeurs opérationnelles
•
0
x
,
•
0
z
, de la
grandeur déjà calculée
θ
et de la longueur L.
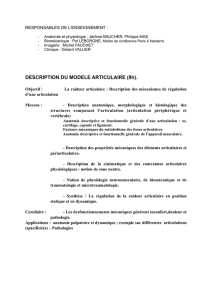
Fig5 –Positions et vitesses
Q5/
Vérifier vos résultats à l'aide de la figure 5, à l'instant t = 0.75 s et indiquer l'état des
différentes grandeurs articulaires obtenues.
II.4 Elaboration du modèle dynamique - Dimensionnement en couple
Le travail abordé dans cette question permet d'établir les couples que doivent fournir les actionneurs
en cours de mouvement. On se limitera à un mouvement dans le plan
),,(
001
yxO
r
r
et à l'étude du système
matériel S = {1,2} constitué du bras 1 et de l'avant-bras 2.
On modélise le robot par :

PSI Les Ulis
DM1
CI
8
:
Dynamique des systèmes
Sciences Industrielles pour l’Ingénieur 4/4
• le bras 1 avec son équipement, de centre d'inertie G
1
tel que
111
2
x
L
GO r
=
, de masse m, de
longueur O
1
O
2
= L, d'inertie I par rapport à l'axe
),(
1
zG
r
considéré comme un axe principal
d'inertie.
• l'avant-bras 2 avec son équipement, de centre d'inertie G
2
tel que
222
2
x
L
GO r
=
, de masse m,
de longueur
22
)( xrLCO
r
−=
, d'inertie I par rapport à l'axe
),(
2
zG
r
considéré comme un axe
principal d'inertie.
• le poignet 3, caractérisé par son centre O
3
, de masse négligeable et tel que
33
xrzzCO
r
r
+=
.
Q6/
Déterminer le moment cinétique en O1 du solide 1 dans le mouvement de 1 par rapport au
référentiel galiléen R
0
.
Q7/
Déterminer le moment cinétique en G2 du solide 2, dans le mouvement de 2 par rapport au
référentiel galiléen. En déduire le moment cinétique
0/2,1 RO
σ
que l'on écrira sous la forme
( ) ( )
zBA
RO
r
))(.(
0/2,1
•••
++=
θϕϕθϕσ
.
Q8/
En déduire l'expression du moment dynamique du système S : {1,2} :
0/,1 RSO
δ
Q9/
Appliquer le théorème du moment dynamique en O
1
au système matériel S en projection sur
l'axe
z
et déterminer le couple C
1
que doit fournir l'actionneur pour obtenir un tel
mouvement. Vérifier votre résultat dans le cas simple où
•
ϕ
= 0 et
ϕ
= 0 tout au long du
mouvement
On se place dans la même configuration de fonctionnement que dans la partie précédente (II.3) et on
prend les valeurs I = 0.045 kg.m
2
et m = 1.7 kg :
Q10/
Dériver l'expression obtenue à la question 4 afin de déterminer les accélérations
articulaires en fonction des grandeurs opérationnelles
••
0
x
,
•
θ
et
θ
(grandeurs déjà
calculées) et de L. Vérifier que le couple à fournir est proportionnel dans cette
configuration à
••
θ
, et qu'il est du même ordre de grandeur que celui représenté à la figure 6.
Fig6 – Accélération du robot
Q11/
Quelle équation issue du principe fondamental de la dynamique devrait-on écrire pour
déterminer le couple C
12
(ne pas faire les calculs).
1
/
4
100%