Télécharger

Chapitre E2: Systèmes avec rétroaction - exemple de l’Amplificateur Linéaire Intégré Activité expérimentale
AE n◦2 : Pédale de distorsion pour guitare électrique
Aumilieudesannées50,lorsquelesguitaresélectriquessontdevenuespopulaires,touslesamplificateurs
étaientconçuspourlavoixetnedonnaientpasvraimentsatisfactionauxguitaristes.Laseulefaçond’obtenir
unesaturationconsistaitàpousserlevolumeàfond(etespérerquelestubesdesamplisnefondentpas!).
Danslesannées60,lesguitaristesdécoupaientlescônesdeleurshaut-parleurspourobtenirunsonbrouillé.
Plustard,lespremièrespédalesdesaturationontétéconçuesafindesimulerlesondescônesdécoupésetdes
amplissaturés.Actuellement,touslesamplispossèdentunmodesaturation.L’effetpeutêtreégalementobtenu
viaunepédalededistorsion,quelemusicienpeutactiversimplementavecsonpied.
Lorsqu’onparledesaturation,onentendsouventlesmotsoverdrive,fuzzetcrunch.Cesmotsdécriventle
typedesaturationquepeuventdonnerunampliouunepédale.L’overdrivedonneunsonbrutetplutôtdoux.
Lefuzzestunesaturationmétallique,trèsduretandisquelesonducrunchressembleaubruitducraquement
descéréales.
Habituellementleseffetsdesaturationsutilisentdescircuitsàbasedetransistors,amplificateurslinéaires
intégérsetdiodes.L’objectifdeceTPestderéaliserunepédalededistorsioncomprenanttrois"boutons":
—Un bouton Drive,quicontrôlelaquantitédesaturationenvoyée.
—Un bouton contrôle de Tone,permettantderéglerledosageentresonsgravesetaigüs(tonalité).
—Un bouton de Volume.
Pourcela,nousallonsmettreàprofitunelimitationdesALI:lasaturationentension.
Pédalededistorsioncommerciale
Lelecteurintéressépourratrouverunepropositiondemontagepourpédalededistorsion(dontonreprend
iciuneversionsimplifiée)àl’adressesuivante:www.techniguitare.com/Fiches/Histo_Saturation.pdf
1PSI, lycée de l’Essouriau, 2016/2017

Chapitre E2: Systèmes avec rétroaction - exemple de l’Amplificateur Linéaire Intégré Activité expérimentale
1 Réalisation du bouton Drive
Leboutondrive permetderéglerlaquantité desaturationissudelaguitare,avantd’êtreenvoyédans
l’amplificateurreliéauhautparleur.
1. Réglages et mesures préliminaires.
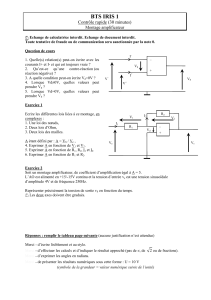
(a) Lesguitaresélectriquespeuventdisposerderéglagesdedistorsionintégrés.Récupérerlesignalissu
del’instrumentàl’aidedepincescrocodiles disposéessurlesdifférentespartiesdelaprise jack et
l’envoyerdansl’amplificateuraudiolui-mêmereliéàunhaut-parleur(voirci-dessous).Assurez-vous
quevotreinstrumentestréglédetellesortequ’ilémetteunson clair (nondistordu).
(b) Mesurerdirectement lesignalissudel’instrumentàl’oscilloscope.Mesurerl’amplitudemoyenne Ug
dusignalensortiedelaguitare.Onattendunordredegrandeuretnonunemesuretrèsprécise,
maisunordredegrandeur.
2. Réalisation du montage permettant la distorsion
Pourréaliserl’effetdrive oncompteinsérerunmontageamplificateurnoninverseurentrel’instrumentet
l’amplificiateuraudiodontlegain,modifiable,permetdefairesaturerlesondel’instrumentensortie.
(a) ComptetenudelamesuredeUg,queldoitêtrel’ordredegrandeurdelavaleurdugaindumontage
amplificateurnoninverseur?
(b) Réaliserunmontageamplificateurnoninverseurdontlegainpermetdefairesaturerlesondela
guitareensortie.Onchoisiraunerésistance variable pourfairevarierlegaindel’amplificateur.On
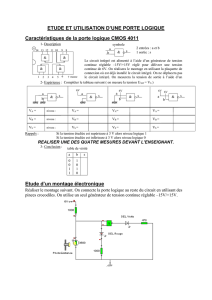
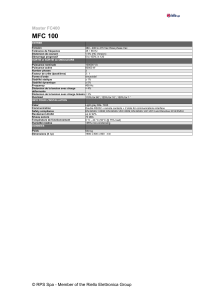
utiliseraunALI LM741 dontlafichetechniqueestdonnéeenannexe.
(c) Ecouterauhaut-parleurl’effetdeladistorsionsurlesignal;justifierqualitativementquelarésistance
variableestlebouton Drive devotrepédalededistorsion.
(d) Tracerl’alluredusignaltemporelensortiedumontagelorsquelesonsaturepuisanalyserl’évolution
de son spectre (mode FFT de l’oscilloscope) lorsque le drive augmente. Commenter l’apparition
desharmoniquesdanslespectre.On pensera à déconnecter l’ampli audio si sa présence perturbe
l’observation du signal temporel sur l’oscilloscope.
3. Caractérisation du montage
(a) Remplacerlesignaldelaguitareparunsignalsinusoïdaldemêmefréquenceetd’amplitudeUg.
Déterminerexpérimentalementlavaleurdugainminimal permettantdefairesaturerlesignal,accom-
pagnéed’uneincertitudedemesure.Lavaleurobtenueest-ellecohérenteaveclecalculthéorique?
(b) MesurerlesvaleursdeUsat,+etUsat,−:lesniveauxdesaturationensortiesont-ilssymétriques?
2PSI, lycée de l’Essouriau, 2016/2017

Chapitre E2: Systèmes avec rétroaction - exemple de l’Amplificateur Linéaire Intégré Activité expérimentale
2 Limitations du montage : saturation en vitesse et bande passante
Plusieurslimitationsdufonctionnementdel’ALIn’ontpasétéprisesencomptedanslapartieprécédente:la
saturationenvitessedebalayageetsabandepassante.L’objectifdecettepartieestdequantifierceslimitations
afindeconcluresurleurimpactdansl’applicationdelapédalededistorsion.
1. La vitesse limite de balayage
(a) Mise en évidence du phénomène : remplacerlesignaldelaguitareparunsignalsinusoïdaldemême
amplitudeetdefréquence50kHz.Limiterlavaleurdugaindetellesortequelesignalensortiedu
montageamplificateurnoninverseurnesatureplus(maisrested’amplitudeélevée).Augmenteralors
progressivementl’amplitudedusignald’entréeetobserverl’évolutiondel’alluredusignalensortie
dumontage:onparledetriangularisation.Renouvellerl’expérienceavecunsignaldefréquence
f=1kHz :observez-vousànouveaulephénomène?
(b) Danslecasoùf=50kHz observerpuiscomparerl’évolutiondesspectresd’entréeetdesortie
lorsquelafréquenceaugmente(moduleFFTdel’oscilloscope),justifieralorsquecephénomènedit
devitesse limite de balayage estsusceptibled’introduireunedistorsionsurlesignal.
Lavitesse maximale de balayage vm,encoreappeléeslew rate,représentelavariationmaximaledetensionque
peutreproduireunALIenuntempsdonné.vmestdoncunetensionparunitédetempsets’exprimegénéralement
enV /µs.Lavitessedevariationdusignalus(t)estlimitéeparunevaleurfinie:
max
dus
dt =vm(1)
(c) MesurervmetdéterminersavaleurenV /µs accompagnéed’uneincertitudedemesure(voirenan-
nexelaformuledepropagationdeserreurs).Vérifierquelavaleurobtenueestcohérenteavecla
donnéedufabricant.
(d) Concluresurl’influencedelavitessemaximaledebalayagesurl’applicationdelapédalededistor-
sion.
2. La bande passante
(a) L’amplificateurnoninverseurprésenteuncaractèrepasse-basdufaitdel’utilisationd’unALI:mesurer
leproduitgain-bandepassantedevotremontageetcomparervotrevaleuràcelledufabriquant(voir
annexe,Bandwidth,quicorrespondauproduitgain-bandepassante).
(b) Pourl’applicationmiseenœuvreici,préciserdansquellemesurelabandepassanteinfluesurle
signaldel’instrument.
3 Réalisation du bouton de Tone
LeboutondeTonepermetdefairevarierlecontenuspectraldusignaldistordu:ilcontrôlelerapportentre
hautesetbassesfréquencesdanslerendusonore.
1. Proposerpuisréaliserunmontageàdisposerensortiedel’amplificateurpermettantderéalisercette
fonction.Unmontagesuiveurest-ilnécessairelorsdecettemiseencascadesdefiltres?
2. Testervotremontageaveclesignalissudel’instrument.Ilestconseillédenepasréglerledrive trop
fortpourquel’effetdeTonesoitaudible.
3PSI, lycée de l’Essouriau, 2016/2017

Chapitre E2: Systèmes avec rétroaction - exemple de l’Amplificateur Linéaire Intégré Activité expérimentale
4 Saturation en courant : quelle charge minimale en sortie de l’amplifi-
cateur ?
Lefaitdebrancherensortiedumontageamplificateurnoninverseurunampliaudio(àdestinationd’une
enceinte)peutconduireàexigerdel’ALIqu’ildébiteuncouranttropfortpoursescapacités,cequileconduità
saturerencourantetintroduireainsiunenouvellecausedesaturationdusignalaudio.Oncherchedanscette
partieàdéterminerlachargemaximalequ’ilestpossibledebrancherensortiedumontagedrive.
L’ampliaudioestmodéliséparunerésistanceRcdontuneborneestreliéeàlasortiedel’ALIetl’autre
reliéeàlamasse.
1. Réaliserlemontageenconnectantcommerésistancedechargeunboîtierderésistancevariable.On
veilleraàchoisirsoigneusementl’amplitudedelatensiond’entrée(oulegain)afind’éviter la saturation
en tension.Onseplaceraàunefréquencestandarddetravail.Visualisersurunoscilloscopelatension
usmesuréeauxbornesdeRcetfairevariersavaleur.
2. Lefonctionnementdel’ALIest-iltoujourslinéairequelquesoitlavaleurdeRc?Préciserlacausedece
phénomène.
3. Estimerlavaleurducourantdesaturationdel’ALIis,max etlavérifierencomparantàlavaleurindiquée
parlefabricant.Ondonnelarelationentreisetus:
us=Rc
1+ Rc
R1+R2
is
5 Réalisation du bouton de Volume
1. Proposerpuisréaliserunmontagesimple permettantderéglerlevolumedusignalenvoyéauhaut-
parleur.Penserauxprécautionsàprendrelorsqueplusieursfiltressontmisencascade.
2. Testervotremontageaveclesignalissudelaguitare.
Annexes
Propagation des incertitudes
Supposonsavoirévaluél’incertitudedeplusieursgrandeursphysiques(x,y,...)etquel’onsouhaitedéterminer
lavaleurd’uneautregrandeurq=f(x, y, . . . ),quidépenddesvaleursdecesgrandeurs,etévaluerl’incertitude
δq sursadétermination.Leserreursdemesurecommisessurxetyvontserépercutersurq...Maiscomment
évaluerlanouvelleincertitudeδq ?
Onutilisepourcelalaformuledepropagationdeserreurs:
δq =s(δx)2∂f
∂x 2+(δy)2∂f
∂y 2+. . .
— Danslecasd’unesomme:q=x+y+...δq =q(δx)2+(δy)2. . .
— Danslecasd’unproduit:q=xαyβ. . . ,l’incertitudesecalculedelamanièresuivante:
δq =qsα2(δx
x)2+β2(δy
y)2. . .
4PSI, lycée de l’Essouriau, 2016/2017

LM741
www.ti.com
SNOSC25C –MAY 1998–REVISED MARCH 2013
LM741 Operational Amplifier
Check for Samples: LM741
1FEATURES DESCRIPTION
The LM741 series are general purpose operational
2• Overload Protection on the Input and Output amplifiers which feature improved performance over
• No Latch-Up When the Common Mode Range industry standards like the LM709. They are direct,
is Exceeded plug-in replacements for the 709C, LM201, MC1439
and 748 in most applications.
The amplifiers offer many features which make their
application nearly foolproof: overload protection on
the input and output, no latch-up when the common
mode range is exceeded, as well as freedom from
oscillations.
The LM741C is identical to the LM741/LM741A
except that the LM741C has their performance
ensured over a 0°C to +70°C temperature range,
instead of −55°C to +125°C.
Connection Diagrams
LM741H is available per JM38510/10101
Figure 1. TO-99 Package Figure 2. CDIP or PDIP Package
See Package Number LMC0008C See Package Number NAB0008A, P0008E
Figure 3. CLGA Package
See Package Number NAD0010A
1Please be aware that an important notice concerning availability, standard warranty, and use in critical applications of
Texas Instruments semiconductor products and disclaimers thereto appears at the end of this data sheet.
2All trademarks are the property of their respective owners.
PRODUCTION DATA information is current as of publication date. Copyright © 1998–2013, Texas Instruments Incorporated
Products conform to specifications per the terms of the Texas
Instruments standard warranty. Production processing does not
necessarily include testing of all parameters.
 6
7
8
6
7
8
1
/
8
100%