L C’est le cortex moteur qui permet le mouvement volontaire. Actuellement... pour son aspect biorobotique.

LE MOUVEMENT VOLONTAIRE
C’est le cortex moteur qui permet le mouvement volontaire. Actuellement c’est un sujet très étudié
pour son aspect biorobotique.
Le mouvement volontaire est un mouvement qui a un but.
Ex de 2 mouvement volontaires : la signature ou l’écriture qui a été appris et donc a un aspect
« learning ». Et le baseballeur qui attrape une balle, il doit prédire la position de la balle dans l’espace
car le feedback sensoriel est un mécanisme lent. Il y a un autre aspect, l’ajustement postural. On a tjs
un ajustement posturale qui est compatible avec le mouvement que nous sommes en train de faire
(lors de l’écriture les premiers muscles activés sont les mollets, ceux du dos, et après ceux de la
main).
1) caractéristique des mouvements volontaires
Les mouvements volontaires, comme tous les mouvements, ont une composante sensorielle et une
composante motrice.
Les signaux qui codent le but doivent être intégrés dans la configuration du corps. C'est-à-dire qu’il y
a nécessairement un ajustement du corps, car sa position dépend du but que l’on souhaite atteindre.
Une stratégie motrice va être mise en place par la suite. Cependant il y a plein de stratégie motrice
possible qui dépend de notre position par rapport à l’objet. Il y a une stratégie de haut niveau qui va
décomposer le mouvement en commande musculaire. Toute cette stratégie motrice globale va
mettre en place un certain nombre de synergie musculaire qui vont être très variable. Pour cela on
va utiliser 2 systèmes de contrôle : le feedback et le feed forward.
Feedback : on tient un objet et on à une perturbation, cette variation va être détectée par les
capteurs. Les informations sont envoyées au comparateur, il compare la commande envoyé au
membre par rapport à l’information sensoriel qui revient. C’est un contrôle de type régulation
puisqu’on maintient un point constant. Ex de régulation: thermostat, pH, glycémie.
Cette commande donne un état désiré, un but. Toute perturbation va introduire une modification de
l’input sensoriel et donc une modification de la commande motrice de façon à maintenir l’état.
Feed-forward : c’est une prédiction. On a une détection visuelle (plus rapide que la détection
proprioceptive), et en fonction de l’estimation de la vitesse de la balle on positionne notre bras dans
l’espace. On prévoit la commande motrice à appliquer pour attraper la balle.
Il ya de l’information sensoriel vu par le système visuel, et une réponse anticipatrice motrice.
Ce feed forward peut être modifié par l’expérience et l’apprentissage.
C’est un élément important pour les comportements moteurs et habiletés motrices.

Ex de non dissociation du feedback et feed forward : on enregistre l’activité électromyographique
des muscles biceps, triceps, FCR, ECR. Quand la balle tombe, les muscles se préparent à la recevoir,
l’EMG est déjà activé. Si la balle est plus lourde que prévus, alors l’EMG augmente énormément. Il y a
une réponse réflexe avec ajustement, que l’on nomme la réponse en 3 phases.
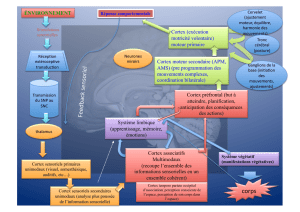
Dans le mouvement volontaire il y a 3 parties, elles correspondent globalement à 3 ensemble de
structure du cerveau :
1. La planification, « pourquoi faire ? ». On a l’intention de faire un mouvement. Il y a
intervention des aires associatives et des noyaux de la base.
2. La programmation, « comment faire ? ». Il faut que j’établisse une stratégie pour attraper
l’objet, quels muscles je vais mettre en jeu ? Il y a intervention des aires pré-motrices et
motrices supplémentaires.
3. L’exécution. Avec intervention du cortex moteur (M1)
Mais cela reste dichotomique, sur la diapo suivante on peut voir que les ganglions de la base
interviennent dans la programmation…car la différence entre la planification et la programmation est
difficile à faire.
Dans ce cours on s’intéresse au cortex moteur primaire, les aires du cortex pré-moteur et les aires
supplémentaires.
Definitions :
Temps de réaction= planification + programmation.
Temps d’exécution= début, déroulement et fin du mouvement.
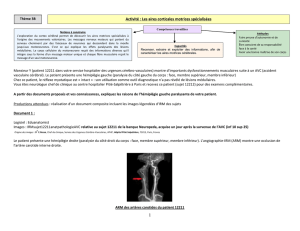
2) Données anatomiques
a) les aires corticales
On va s’intéresser au cortex moteur primaire (M1), à l’aire supplémentaire qui est plutôt du coté
médian, au cortex pré moteur, au cortex pré frontal, au cortex pariétal
Voie du what et where
Image d’histologiste des cellules pyramidales du cortex moteur, les grosses cellules pyramidales sont
les cellules dites de Betz.
Comment identifier un cortex moteur, d’un sensoriel ou associatif ? Cela dépend des types de
couches qu’il y a. Dans le cas d’un cortex moteur d’un sensoriel, la différence est que dans le cortex
sensoriel il y a une arrivée importante d’information qui viennent du thalamus, donc la couche
d’arrivée est très importante. Le plus nette est dans le cas du système visuel où la couche 4 a été
divisé en plusieurs sous couches tellement elle est importante. Alors que dans le cortex moteur ce
sont les couches profondes 5 et 6 qui envoient des axones de sortie vers d’autres structures.

Chez l’homme le cortex fait 3 à 4 mm, et est constitué de 6 couches : la couche 4 c'est-à-dire celle
d’entrée ; la couche 2 et 3 qui permet de faire des relations cortico-corticales ; et les couches 5 et 6
qui sont des voies de sortie.
La couche moléculaire correspond à la couche 1 où il n’y a que des fibres qui y passe, ensuite il y a la
couche granulaire externe, la couche pyramidale, l’interne granulaire, la ganglionnaire, et la couche
multiforme.
Les couches 1 et 4 sont les couches d’arrivées du thalamus des afférences spécifiques (couche 1) et
non spécifiques (couche 4). La couche 2 est la sortie principales des efférences, puis on a les
efférences cortico-corticales, et la couche 5 pour les efférences cortico-thalamique.
b) Les voies corticospinales
1. La voie latérale
L’origine de cette voie est 1/3 du cortex pré moteur, 1/3 du cortex moteur primaire, et 1/3 du cortex
somatosensoriel. C'est-à-dire l’aire 6, l’aire 4 (M1), 3 et 2 (S1). Il y a donc des voies motrices qui
partent de l’aire S1 sensoriel et pas que des voies qui y arrivent.
-Cette voie croise (décussation des pyramides) et elle va s’articuler sur les motoneurones des
muscles.
- 70% à 90% sont croisés. Donc il en reste 10 à 30% de non croisés. En effet au cours du
développement chez l’homme il y a au début autant de fibres d’un côté que de l’autre, mais
progressivement il ya disparition de fibres directes. Mais cela ne disparait pas chez tous le monde,
pour certains la voie pyramidale est presque équivalente des 2 côtés et les sujets font des
mouvements miroirs.
-Monosynaptique avec les motoneurones des muscles distaux, l’activation est quasiment
instantanée. C’est un mécanisme extrêmement développé chez les mammifères : primate, chat,
rat…mais au dessous de cette phylogénèse c’est le rubrospinal qui la remplace. Dès que les animaux
sont sortis de l’eau il ya eu apparition du rubrospinal pour la locomotion des membres. Chez
l’homme le rubrospinal n’est plus impliqué dans l’habilité manuelle.
-Capable d’effectuer des mouvements fins de la main.
-Très développé chez les primates.
2. La voie ventrale
Son origine provient seulement des aires 6 et 4. Et ça se projette de façon bilatérale, mais la
décussation se fait au niveau médullaire. Cette voie est impliquée dans la posture et est
polysynaptique.
En résumé on a 2 voies : une associée aux mouvements fins et l’autre qui est liée à l’aspect posturale.

Les motoneurones des muscles, dans la moelle épinière, sont organisés comme des colonnes de
motoneurones qui correspondent à des muscles. Et on s’aperçoit que les muscles proximaux ont
leurs motoneurones plus médians que les muscles distaux. Tous ce qui ce passe près de la ligne
médiane correspond à tous ce qui est posturale et axiale. Ainsi dans les différents muscles, les
extenseurs sont plus ventraux que les fléchisseurs. On a bien une organisation des noyaux des
motoneurones.
c) Les structures sous corticales
C’est un système globale : Il y a le cervelet, le cortex cérébral, le thalamus, le système
extrapyramidal, tous le système moteur qui part du tronc cérébrale, et les ganglions de la base.
On a donc au départ le cortex moteur, et ensuite 2 voies en parallèle : le système pyramidal (pour les
mouvements volontaires avec une origine au niveau des aires 3, 4 et 6) et la voie extrapyramidal
(contrôle posturaux et des mouvements réflexes).
Dans le système extrapyramidal il y a plusieurs voies : les voies médiales c'est-à-dire celle qui
viennent du tectum (=toit optique), les voies réticulospinal avec la formation réticulé pontique et
médullaire, le vestibulospinal latéral et médial, la voie latéral avec le noyau rouge qui est peu
développé chez l’homme.
Les voies cortico- et rubrospinal sont impliquées dans les mouvements fins. Si on fait une lésion de
ces voies et qu’on met un obstacle sur le passage de l’animal, alors les pattes arrière se heurtent à
l’objet. Il a un mauvais jugement de la hauteur de l’objet. Ces voies sont donc mises en jeu dans le
« jugement fin » de l’objet.
Si on fait une lésion du réticulospinal, alors l’animal a une paralysie définitive.
Les ganglions de la base sont découpés en 4 parties : le striatum, les globus pallidus, les noyaux sous
thalamique, et la substance noire. Les ganglions de la base sont en liens avec les cortex moteurs. Le
striatum reçoit des afférences de l’aire motrice supplémentaire, du cortex pré moteur, de M1, de S1,
et du cortex pariétal associatif. Puis on a une boucle qui passe par le thalamus, avec une voie dite
directe et indirecte.
Dans les pathologies il y a un déséquilibre de ces voies, c'est-à-dire que soit le système devient
hyperexcitable ou hypoexcitable au niveau du thalamus.
Le cervelet a un lobe antérieur et postérieur. Ils sont constitués du vermis, d’une partie
intermédiaire et latéral. C’est une structure qui a un rôle dans l’équilibration et l’apprentissage
moteur. NB : le gecko possède seulement le lobe flocculonodulaire.
Le cervelet reçoit des informations sensorielles des muscles via les faisceaux spinocérébéleux
(dorsale et ventrale) qui donne des informations sur le fonctionnement des réseaux de neurones
dans la moelle épinière.

3) Données physiologiques
a) le cortex moteur primaire
Il a été montré que la connexion est monosynaptique, quand on pratique une stimulation de Penfield
sur le cortex moteur on peut enregistrer l’activité électromyographique qu’au niveau de la main et
on s’aperçoit qu’on a une réponse après un certain délai. Et au niveau des doigts on voit une
signalisation différente entre le cortex moteur et de la signalisation cervicale, cela veut dire que la
voit pyramidale au niveau de la voie cervicale donne une réponse plus précoce que lorsqu’on stimule
le cortex moteur. Ce qu’on a pu prouver, c’est que les connexions du cortex moteur et ceux de la
main sont des connexions monosynaptiques.
Si on fait des microstimulations on s’aperçoit qu’elles pouvaient provoquer des mouvements
particuliers à différents endroits. L’organisation est beaucoup plus fine, mais aussi plus disjointe.
Deuxième point, le courant le plus petit active plusieurs muscles. Cela suggère qu’une cellule
corticospinale ce termine sur plusieurs motoneurones.
La cartographie faite par Penfield permet une représentation corticale des différentes parties du
corps. Par ex les cellules de S5, qui répondent à la stimulation des lèvres, sont connectées avec les
cellules motrices qui font bouger les lèvres. C'est-à-dire qu’il y a des connexions cortico-corticales
extrêmement puissante.
Ce qui a été fait est la technique de STA (« Spike-triggered averaging ») par Lemon. A chaque fois
qu’il y a un potentiel d’action (PA) dans le cortex moteur, et qu’il y a des connexions
monosynaptiques, alors il y a activation de plusieurs muscles pour une cellule donnée.
Lui, il enregistre l’activité électromyographique chez le singe pendant des milliers de PA. Après, il
moyenne ces activités électromyographiques en synchronisant sur chaque PA cortical. Il corrèle un
PA d’une cellule avec l’EMG globale. Cette technique permet alors de relier une activité cellulaire
avec une cible supposée. Ainsi il trouve qu’un motoneurones particulier de M1 peut activer
différents muscles (2 à 3 muscles).
Finalement on à une organisation en colonne dans le cortex. Une cellule de l’aire 5 va se terminer sur
plusieurs muscles dont T pour le pouce, D1 et D2 pour 2 doigts. Ces 2 doigts peuvent être activés
pour effectuer un mouvement donné. Ainsi une cellule va pouvoir activer plusieurs types de
motoneurones. Et un seul muscle, du pouce par exemple, peut être activé par plusieurs colonnes en
associations avec plusieurs doigts.
En résumé une seule cellule peut activer 2 à 3 muscles, et plusieurs régions peuvent activer un
membre.
Que donnent les neurones de M1 ?
Expérience d’Evarts : Le singe tient une barre et tout ce qu’il a à faire est de tourner le poignet. S’il
fait une extension puis une flexion, la cellule est activée avant et pendant toute la flexion. Puis Evarts
augmente le poids, c'est-à-dire que l’animal doit exercer une force plus importante, dans ce cas
l’activité de l’EMG augmente. La décharge a bien lieu avant, mais elle est plus importante. Donc il en
a déduit que le cortex moteur codait la quantité de force développé par les muscles. Pour être sur
que ce soit le cortex et pas le mouvement qui code, il a bougé passivement le poignet et il observe
qu’il n’y a pas de décharge de la cellule. Alors il n’y a pas d’aspect codage du déplacement.
 6
6
1
/
6
100%