Dimensionnement d'un drone : Exercice sur les pales de rotor

JLB
TD
1
–
dimensionnement d’un drône
Caractéristiques des pales de rotor
1
TD 1 – DIMENSIONNEMENT D’UN DRONE
1 CARACTERISTIQUES DES PALES DE ROTOR
Le drone peut être équipé
de 1, 2 ou 4 rotors. On
choisira donc soit un rotor
de rayon R
1
, soit deux
rotors de rayons R
2
soit
quatre rotors de rayon R
4
.
Les configurations sont
données ci-contre.
Le client (l’armée) impose que la surface totale balayée par les rotors du drone
n’excède pas 1 m
2
pour des questions de repérage radar.
Chaque rotor est en rotation par rapport au corps du drone autour de l’axe (O, z). On
choisit dès le départ pour des questions de simplicité d’utiliser des rotors bi-pales.
On considère que
chaque pale a une
longueur R (rayon
du rotor) : [OC] = R.
Les points
d’application des
efforts sur les pales
sont A et B tels que :
[OA] = [OB] = R/2.
L’expression des forces de
Portance (sur z) et de Traînée
(sur x) sur une pale sont
données par :
2
ZZ
VCS
2
1
Pρ=
2
XX
VCS
2
1
Tρ=
P et T : Portance et Traînée en N.
Sx et Sz : surfaces projetées en m2
V : vitesse relative air/aile en m/s.
ρ : masse volumique de l’air 1.2 kg/m3
Le profil d’aile utilisé est de type NACA (profil symétrique par rapport à la corde).
Dans les 3 cas (1, 2 ou 4 rotors) on utilise le même profil mais les pales ont des
longueurs différentes.
Les courbes des coefficients Cz et Cx sont données page suivante.
2
TD 1
–
dimensionnement
d’un drône
Caractéristiques des pales de rotor
JLB
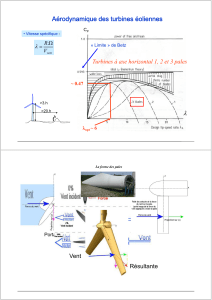
Courbe 1 : Cz en fonction de l’angle d’incidence α (en degrés).
Courbe 2 : Cx en fonction de l’angle d’incidence α (en degrés).

JLB
TD
1
–
dimensionnement d’un drône
Caractéristiques des pales de rotor
3
Profil « NACA 23012 », donné ci-dessous pour les angles de portance 0, 4° et 8°.
Lorsque l’hélicoptère est au sol et que le rotor est mis en rotation, l’angle α est de 0°.
Pour un vol stationnaire (hélicoptère immobile à une altitude donnée) α égale 4°.
Pour l’élévation (déplacement vertical) α vaut 8°.
4
TD 1
–
dimensionnement
d’un drône
Questi
ons
JLB
2 QUESTIONS
Q1
Compte tenu du sens de rotation du
rotor, représentez par des vecteurs les
forces de trainées (T
A
et T
B
) ainsi que les
forces de portances (P
A
et P
B
) appliquées
par l’air sur les pales du rotor. Il va de
soi que seul l’orientation des vecteurs est
importante puisque vous ne connaissez
pas encore leur intensité.
Q2
La longueur de chaque pale vaut R ([OC] = R).
Déterminez en fonction de R la distance d parcourue par le point C extrémité de la
pale en un tour de rotor.
Soit N (tours/mn) la vitesse de rotation d’un rotor. Déterminez en fonction de N et de
R la vitesse du point C par rapport au drone supposé immobile. Cette vitesse V
C
sera
exprimée en m/s.
Déduisez de ce qui précède l’expression de la vitesse V
A
du point A situé au milieu de
la pale. Cette vitesse est bien entendu égale à V
B
.
Q3
Déterminez l’expression de la force de portance P
A
en A sur une pale en fonction de R,
Lz, V
A
, ρ et Cz.
Déduisez en l’expression de la portance P
R
d’un rotor en fonction de R, Lz, N, ρ et Cz.
En supposant que lorsqu’il y a plusieurs rotors ceux-ci tournent à la même vitesse de
rotation, déterminez la valeur de la portance totale P
T
dans chaque cas (1, 2 ou 4
rotors, P
T1
en fonction de R
1
, Lz, N
1
, ρ et Cz, de même P
T2
en fonction de R
2
, Lz, N
2
, ρ et
Cz et P
T4
en fonction de R
4
, Lz, N
4
, ρ et Cz). N
1
est la vitesse de rotation du rotor dans le
cas 1, N
2
est la vitesse de rotation des deux rotors dans le cas 2 et N
4
est la vitesse de
rotation des quatres rotors dans le cas 4. De même, R
1
, R
2
et R
4
sont les longueurs des
pales dans les différents cas.
Q4
La vitesse V
C
ne doit pas dépasser 80% de la vitesse du son (V
S
= 340 m/s). Exprimez
cette condition entre V
C
et V
S
et déduisez en la condition que doit respecter N en
fonction du rayon R.
Q5
Donnez l’expression de la surface S occupée par la somme des rotors dans chaque cas
de figure (1, 2 ou 4 rotors). Déduisez en les valeurs de R
1
, R
2
et R
4
permettant de
vérifier la condition de surface imposée par le client.

JLB
TD
1
–
dimensionnement d’un drône
Questions
5
Q6
A partir des réponses aux questions 3 et 4 déterminez les vitesses de rotation maxi des
rotors N
1
, N
2
et N
4
selon que l’on a 1, 2 ou 4 rotors.
Q7
Déterminez la vitesse du point A situé au milieu de la pale dans chaque cas de figure.
Cette vitesse V
A
est bien entendu égale à V
B
vitesse du point B. Si vous réfléchissez un
peu, la réponse ne dépend que de la condition imposée à la question 4.
On admettra pour la suite
V
A
= V
B
= 130 m/s dans tous les cas ; R
1
= 0.56 m ; R
2
= 0.4 m ; R
4
= 0.28 m
Q8
Déterminez Cz pour α = 0°, α = 4° et α = 8°.
Déterminez l’expression de la portance P
A
sur une pale en fonction de R dans le cas du
vol stationnaire (α = 4°, Lz = 0.0499 m). Déduisez en la portance P
R
d’un rotor en
fonction de R.
Déterminez la portance totale dans chaque cas (1, 2 ou 4 rotors) pour le vol
stationnaire.
Déduisez en la solution permettant d’embarquer le drone ayant la plus grande masse
ainsi que la valeur de celle-ci (g = 9.8 m/s
2
).
On admettra pour la suite que la solution 4 rotors est la meilleure.
V
A
= V
B
= 130 m/s ; R
4
= 0.28 m ; N
4
= 9200 trs/mn
Q9
Déterminez la valeur maxi de Cx dans la plage de variation de l’angle d’incidence.
Déduisez en la valeur de l’effort de trainée T
A
sur une pale.
Calculez le moment en O de l’effort T
A
.
Déduisez en le couple C
M
que devra appliquer le moteur pour faire tourner le rotor (le
couple est la somme des moments calculé en O).
Q10
Déterminez la vitesse de rotation Ω d’un rotor en radian par seconde. On rappelle
qu’un tour égale 2 × π radians.
Déterminez la puissance dont devra disposer le moteur pour faire fonctionner chaque
rotor. La puissance est le produit du couple (N.m) × vitesse de rotation (rd/s). La
puissance s’exprime en Watt (W).
Q9
En regardant les courbes de Cz et Cx, d’après vous, pourquoi se limite t-on à une plage
de variation de [0° ; 8°] pour l’angle d’incidence ?
6
TD 1
–
dimensionnement
d’un drône
Coupon Réponse
JLB
3 COUPON REPONSE
R1
R2
d = V
C
=
V
A
=
R3
P
A
= P
R
=
P
T1
= P
T2
= P
T3
=
R4
V
C
N

JLB
TD
1
–
dimensionnement
d’un drône
Coupon Réponse
7
R5
S = R
1
=
S = R
2
=
S = R
4
=
R6
N
1
= N
2
= N
4
=
R7
V
A1
= V
A2
= V
A4
=
R8
Cz0° = Cz4° = Cz8° =
P
A
=
P
T1
= P
T2
= P
T4
=
M
drone
=
R9
Cx8° = T
A
=
M
O
= C
M
=
8
TD 1
–
dimensionnement
d’un drône
Coupon Réponse
JLB
R10
Ω = P
M
=
R11

JLB
TD
1
–
dimensionnement d’un drône
Corrigé
9
4 CORRIGE
R1
R2
R
2
d
π
=
En une minute le point C parcourt donc (m/s)
30
NR
60
R
N
2
VRN2dN
C
π
=
π
=→π=×
Le point C est situé au milieu de la pale, il parcourt donc la moitié de la distance
parcourue par C.
(m/s)
60
RN
2
V
V
C
A
π
==
R3
2
ZZ
2
ZZAR
2
AZZA
60
RN
CS
60
RN
CS
2
1
2P2PVCS
2
1
P
π
ρ=
π
ρ==→ρ=
2
11
ZZ1T
60
RN
CSP
π
ρ= ;
2
11
ZZ2T
60
RN
CS2P
π
ρ= ;
2
11
ZZ3T
60
RN
CS4P
π
ρ=
R4
(trs/mn)
R
2597
N
R
V8.030
NV8.0
30
NR
V
100
80
V
S
SSC
<→
×π
×
×
<→×<
π
→<
PA
PB
TA
TB
10
TD 1
–
di
mensionnement
d’un drône
Corrigé
JLB
R5
Avec S = 1 :
m 564.0RSR
1
2
1
=
→
=
π
; m 399.0RSR2
2
2
2
=
→
=
π
; m 282.0RSR4
4
2
4
=
→
=
π
R6
(trs/mn) 4600
R
2597
N
1
1
=< ; (trs/mn) 6508
R
2597
N
2
2
=< ;
(trs/mn) 9209
R
2597
N
4
4
=<
R7
La vitesse du point C vaut dans tous les cas 80/100 de V
S
. Le point A étant situé au
milieu de la pale, il parcourt la moitié de la distance parcourue par le point C. V
A
est
donc toujours égale à V
C
/2 soit 40/100 de V
S
c’est à dire 136 m/s.
R8
Cz0° = 0 ; Cz4° = 0.48 ; Cz8° = 0.88
(N) R486PR24313048.0R0499.02.15.0VCS
2
1
P
R
22
AZZA
×=→×=×××××=ρ=
(N)
272
56
.
0
486
P
1T
=
×
=
;
(N)
389
4
.
0
486
2
P
1T
=
×
×
=
;
(N)
544
28
.
0
486
4
P
1T
=
×
×
=
La solution la plus intéressante est celle à 4 rotors, la masse du drone peut atteindre
544/9.81 = 55.5 kg
R9
Cx8° = 0.024 ;
(N) 45.0130024.028.00066.02.15.0VCRH
2
1
VCS
2
1
T
22
AX4X
2
AXXA
=×××××=ρ=ρ=
(N.m) 126.0C(N.m) 063.045.0
2
28.0
T
2
R
M
MA
4
A
=→===
R10
(W) 5.121126.0963P (rd/s) 963
60
2
9200
M4
=×=→=
π
×
×
=Ω
R11
On remarque que sur la plage indiquée, le coefficient de trainée Cx varie peu, c’est
donc sur cette plage que le couple moteur sera le plus constant et le plus faible.
Par ailleurs, après 8°, il y a une brusque décroissance de Cz ce qui risque de faire varier
brutalement la portance et donc provoquera un « décrochage » du drone.
1
/
5
100%