Correction Porte avion Charles de Gaulle1

TD frein appontage - Page 1 -
Correction
Porte avion Charles de Gaulle1
ETUDE DES DISPOSITIFS DE FREINAGE
Questions préliminaires
R1/ L'application du théorème de la résultante dynamique en projection sur
l’axe x de déplacement de l’avion fournit l'équation suivante :
∑
∑∑
∑
=
==
=
−
−−
−=
==
=−
−−
−
3
1ii
Ta.M
R2/ L'application du théorème de la résultante dynamique en projection sur
l’axe z perpendiculaire à la surface du sol fournit l'équation suivante :
∑
∑∑
∑
=
==
=
+
++
+−
−−
−=
==
=
3
1
0
ii
Ng.M
R3/ Pour chaque roue, la relation entre les actions tangentielles et normales
est donnée par la loi de Coulomb considérée à la limite du glissement :
ii
N.fTi =
==
=∀
∀∀
∀
En sommant pour les trois roues, on en déduit que :
aMgMfNfT ii
ii.... 3
1
3
1=== ∑∑ ==
On détermine alors la valeur de l’accélération :
g.fa =
==
=
Cette relation traduit que pour un freinage par adhérence entre roues/sol,
la valeur de l’accélération optimale (chacune des roues à la limite du
glissement) ne dépend que du coefficient de frottement. Elle est en
particulier indépendante de la masse du véhicule.
R4/
Le mouvement est un mouvement de translation uniformément retardé, on
obtient la loi des vitesses et la loi des positions par intégration. Les
conditions initiales permettant de déterminer les constantes sont la vitesse
d’appontage
a
V et l’origine des positions
0
=
==
=
x
pour
0
=
==
=
t
instant initial
du freinage.
La valeur de l’accélération est :
2
.886,581,9*6,0. smgfax
−=−=−=−=
&&
La loi des vitesses est : Cstet.a)t(x +
++
+−
−−
−=
==
=
&
Pour
0
=
==
=
t
, la vitesse est
a
V, donc :
a
Vt.a)t(x
+
++
+−
−−
−=
==
=
&
La loi des positions est :
CstetVt
a
tx
a
++−=
2
.
2
)(
Pour
0
=
==
=
t
, la position est 0)0(
=
x, donc : tVt
a
tx
a
+−=
2
.
2
)(
1
Adapté d’un sujet de CAPET et d’un sujet Mines-Ponts

TD frein appontage - Page 2 -
R5/ En fin de phase de freinage
0
=
==
=
x
&
, donc la durée de cette phase est
f
dt =
==
=
,
,
,
,
,/
a
V
d
a
f
3810
8865 1161
8865 63220
=
==
==
==
==
==
==
==
=
s
La loi des positions est obtenue par intégration de la loi des vitesses :
Cste.t V
t
a.x(t)
a
+
++
++
++
+−
−−
−=
==
=
2
2
Pour 0
=
==
=
t
, la position de l’avion est la position prise pour origine 0
=
==
=
x
,
donc :
.t V
t
a.x(t)
a
+
++
+−
−−
−=
==
=
2
2
La distance parcourue en fin de phase de freinage est :
m.d V
d
a.)x(d
fa
f
f
317
2
2
=+−=
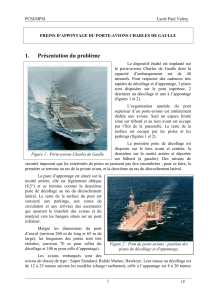
R6/ Même dans des conditions optimales, la distance parcourue au cours d’un
freinage basé sur l’adhérence « roue/sol » est bien supérieure à la
longueur de la piste d’appontage. Il est donc nécessaire de faire appel à
un système complémentaire : les freins d’appontage.
Analyse fonctionnelle
R7/
Fonctions de service Critères Niveaux
FS1 Arrêter l’avion. Distance d’arrêt
m 100
≤
Contrôle des accélérations
3,1
a
a
moyen
imax
≤
FS2
S’adapter aux différents
types d’avion
Masse des avions à l’appontage Entre 8 et 20 tonnes
Vitesse à l’appontage
-1
ap
-1
km.h 250V km.h 200 ≤≤
FS3
Protéger le pilote
Accélération maximale g5a
imax
≤
FS4
Protéger l’avion
Accélération maximale g5a
imax
≤
Encombrement FS5 Intégrer le système de freinage
sur le porte-avions Efforts sur la structure
FS6 Remettre le système en
configuration initiale Temps de reconfiguration
min
2
≤
R8/ Solutions techniques associées aux fonctions techniques :

TD frein appontage - Page 3 -
FS 1 : Arrêter
l'avion Capter l'énergie cinétique de l'avion
Transform er l'énergie m écanique
Protéger l'avion
Etre lié à l'avion
Convertir l'énergie m écanique en énergie
hydraulique Augm enter l'énergie du fluide
Dissiper l'énergie hydraulique en
contrôlant l'effort de freinage
M odifier progressivem ent l'énergie
hydraulique
Restituer l'énergie restante
Recevoir l'énergie hydraulique
Piloter la vanne
Régler le taux d'énergie dissipée
Stocker l'énergie résiduelle Capter l'énergie hydraulique
Transform er l'énergie Recevoir le gaz
Augm enter
l'énergie du gaz
FC 4 : R em ettre le
systèm e en
co nfiguration initiale
Restituer l'énergie stockée
Adapter l'énergie m écanique
FT 11
FT12
FT 13
FT 14
FT 111
FT 121
FT 122
FT 131
FT 141
FT 142
FT 143
FT 144
FT 145
FT 41
FT 42
FT411
FT 412 F T4121
FT4122
Canalisations
C an alis atio ns
Canalisations
A ccum ula teur
Vérin oléopneum atique
Vanne de rem ise e n batterie
Câble
M oufle
A m ortis se urs
Presse
Vanne de lam in age
Vérin
C am e
Câble + Crosse
Double Moufle
Amortisseurs de
poulie et d’ancrage
Presse (vérin)
hydraulique
Vanne de laminage
+ Accumulateurs
Vérin électrique
Came

TD frein appontage - Page 4 -
R9/ Diagramme SADT A-0
Diagramme SADT A0
1
/
4
100%