Pelage d`un ruban adhésif sur un substrat hétérogène

Master Sciences de la matière Stage 2014–2015
École Normale Supérieure de Lyon DE ZOTTI Vincent
Université Claude Bernard Lyon I M2 Physique
Pelage d’un ruban adhésif sur un substrat
hétérogène
Résumé :Lorsqu’un ruban adhésif est détaché d’un substrat par pelage, le front de pelage n’avance
pas toujours de manière régulière. Suivant les paramètres expérimentaux (vitesse imposée, longueur du
ruban, angle de pelage...), la dynamique du front peut être saccadée, avec une alternance de phases
rapides et de phases lentes, d’où son nom : l’instabilité de stick-slip. Des études expérimentales [1, 2]
ont permis de caractériser les différentes dynamiques de pelage apparaissant sur des surfaces homo-
gènes. L’objectif de mon stage consistait à étudier les transitions entre ces dynamiques de pelage sur
des surfaces homogènes, puis de commencer à étudier l’instabilité sur des surfaces hétérogènes. Pour
cela nous avons développé des méthodes expérimentales permettant de modifier localement l’adhésion
sur une surface. Nous avons caractérisé l’instabilité sur ces surfaces, et commencé à étudier quelques
systèmes hétérogènes simples.
Mots-clefs :pelage d’un adhésif, instabilité de stick-slip, surfaces hétérogènes
Stage encadré par :
Stéphane SANTUCCI
stephane.san[email protected] / Tél. : 04 26 23 39 63
Laboratoire de Physique de l’ENS Lyon
46, allée d’Italie
69007 Lyon
http ://www.ens-lyon.fr/PHYSIQUE/
24/07/2015

Remerciements
Je tiens à remercier toute l’équipe du Laboratoire de Physique pour son accueil, en particulier
Stéphane pour son aide quotidienne et sa bonne humeur constante au cours de ces 4 mois. Je remercie
également Loïc pour ses conseils avisés qui m’ont permis d’orienter mes expériences dans la bonne
direction. Merci aussi à Ramon pour l’analyse des signaux acoustiques et la prise en main du dispositif
expérimental. Enfin je remercie tous les stagiaires, doctorants, chercheurs et techniciens pour l’aide
qu’ils m’ont apportée durant ces 4 mois, et qu’ils m’apporteront pour les 3 prochaines années.

Table des matières
Introduction 1
1 Description de l’instabilité de stick-slip 2
1.1 Présentation du montage expérimental . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Les différentes dynamiques de pelage . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Lepelagerégulier....................................... 3
Lestick-sliprégulier ..................................... 3
Lepelagebistable ...................................... 3
Les limites entre ces dynamiques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Aspect multi-échelle de l’instabilité . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2 Transitions entre les dynamiques et origine du stick-slip 6
2.1 Étude des dynamiques à vitesse de pelage croissante . . . . . . . . . . . . . . . . . . . 6
Observationdesdynamiques................................. 6
L’originedumacro-stick-slip................................. 7
2.2 Modification de l’épaisseur du ruban au front de pelage . . . . . . . . . . . . . . . . . 8
3 Du système homogène au système hétérogène 9
3.1 Tests de différents systèmes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
Lesrubansadhésifs...................................... 9
Lessubstrats ......................................... 10
3.2 Forces d’adhésion sur transparent de rétroprojecteur . . . . . . . . . . . . . . . . . . . 10
Évolution avec le nombre de pelage et définition des substrats . . . . . . . . . . . . . . 10
Évolution avec le temps de fluage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
Évolution avec la vitesse de pelage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
3.3 Caractéristiques du stick-slip pour les différents substrats . . . . . . . . . . . . . . . . 13
Lesmacro-stick-slip ..................................... 13
Lesmicro-stick-slip...................................... 14
4 Pelage sur quelques surfaces hétérogènes simples 15
4.1 L’interface entre les substrats . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
L’interface encre/transparent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
L’interface transparent/encre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
4.2 Alterner les substrats pour contrôler le stick-slip . . . . . . . . . . . . . . . . . . . . . 16
4.3 Application à l’analyse acoustique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
Quelques résultats de l’analyse acoustique . . . . . . . . . . . . . . . . . . . . . . . . . 18
Acoustique d’un trait d’encre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
Conclusion 20

Introduction
Les adhésifs sont présents autour de nous dans notre vie quotidienne : du rouleau de ruban adhésif
aux applications industrielles dans l’électronique et l’aéronautique [3]. Cependant, bien que des progrès
considérables aient été réalisés dans ce domaine au cours de ces cinquante dernières années, les origines
microscopiques du phénomène d’adhésion sont complexes et font toujours l’objet de recherche à la
frontière entre la physique et la chimie.
Parmi les recherches effectuées sur les adhésifs, plusieurs études [1, 4, 5] se sont intéressées à la
dynamique de pelage d’un ruban adhésif. En effet, lorsqu’un ruban adhésif est détaché d’un substrat
par pelage, il a été observé que le front de pelage n’avance pas toujours de manière régulière. Suivant
les conditions expérimentales du pelage (vitesse imposée, longueur du ruban, angle de pelage...), la
dynamique du front peut être saccadée, avec une alternance de phases rapides et de phases lentes.
L’origine de cette instabilité, dite de «stick-slip », est liée à la déformation élastique du ruban,
et à la décroissance de l’énergie d’adhésion avec la vitesse de pelage. Elle est responsable du bruit
caractéristique qui apparaît en déroulant un ruban adhésif de son rouleau. Cette dynamique saccadée
apparaît également lors de fracture dans les matériaux, ou lors de frottement à une interface (un archet
sur une corde de violon, une craie sur un tableau...). L’instabilité de stick-slip est à l’origine de plusieurs
problèmes dans l’industrie des adhésifs (bruit assourdissant, endommagement des rouleaux...), d’où
l’importance de prévoir et de contrôler son apparition.
Plusieurs études expérimentales [1] ont été menées sur le pelage d’un ruban adhésif sur une surface
plane homogène. Celles-ci ont permis de caractériser les différentes dynamiques (pelage à vitesse
constant, stick-slip...) apparaissant dans le cas homogène. Cependant, dans la pratique beaucoup de
pelages se font sur des surfaces hétérogènes. L’évolution de l’adhésion dans des conditions hétérogènes
a fait l’objet de plusieurs études [6, 7], mais jamais en présence de stick-slip. L’objectif de mon stage
consistait à étudier les transitions entre ces dynamiques de pelage sur des surfaces homogènes, puis
de commencer à étudier l’instabilité sur des surfaces hétérogènes. Pour cela nous avons développé des
méthodes expérimentales permettant de modifier localement l’adhésion sur une surface. Nous avons
caractérisé l’instabilité sur ces surfaces, et commencé à étudier quelques systèmes hétérogènes simples.
La dynamique du pelage est suivie par détection optique (caméra rapide) et acoustique (transducteur
ultrasonore).
Dans une première partie, je présente le dispositif expérimental utilisé pour caractériser l’instabilité,
ainsi que les différentes dynamiques de pelage observées.
La seconde partie concerne l’étude de l’apparition du stick-slip. À travers deux séries d’expériences,
nous avons tenté de comprendre son origine, puis de la perturber en modifiant l’épaisseur du ruban.
Dans une troisième partie, j’expose différents systèmes que nous avons étudiés dans le but de
modifier localement l’adhésion sur une surface. Nous avons mesuré l’évolution de la force d’adhésion
et des propriétés du stick-slip pour ces systèmes.
Enfin dans une dernière partie je présente nos résultats préliminaires concernant l’étude du pelage
sur quelques surfaces hétérogènes simples.
1

1 Description de l’instabilité de stick-slip
1.1 Présentation du montage expérimental
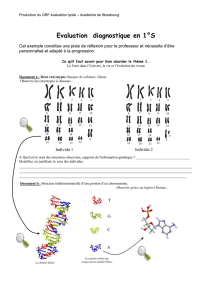
Le dispositif expérimental utilisé pour étudier le pelage d’un ruban adhésif sur une surface plane
est présenté en figure 1.
Vpelage
caméra rapide
θ
L
substrat
Scotch 600
plexiglas
transducteur
acoustique
moteur
0,5mm
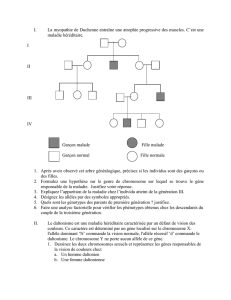
Figure 1: À gauche : schéma du dispositif expérimental. À droite : exemples de photos du front de
pelage à 3 instants successifs, la zone claire correspond au Scotch collé sur le substrat et la zone sombre
au Scotch décollé, nous observons l’avancée du front de pelage.
Le ruban adhésif utilisé pour toutes nos expériences est le Scotch 3M 600 “Crystal”. Une extrémité
du ruban est enroulée autour de l’axe d’un moteur cylindrique, l’autre extrémité est collée sur un
substrat plan à une distance L, lui-même attaché à une plaque de plexiglas. Au début d’une expérience,
le moteur est accéléré à environ 20 m/s2jusqu’à atteindre une vitesse de consigne Vpelage imposée par
l’expérimentateur, et garde cette vitesse constante en arrachant le ruban du substrat jusqu’à la fin
de l’expérience. À l’aide d’une caméra rapide (Photron SA5) et d’un objectif macro nous observons
l’avancée du front de pelage au cours du temps, à travers le substrat et le plexiglas. Le suivi est
réalisé sur environ 2 cm du substrat, avec une résolution spatiale maximale de 5 µm, et une résolution
temporelle pouvant atteindre 2 µs.
Un transducteur acoustique ultrasonore à large bande (Valpey Fisher VP-1.5) est inséré dans la
plaque de plexiglas, il nous donne accès aux vibrations se propageant dans celle-ci lors des expériences
de pelage.
Un couplemètre est relié au moteur. Il permet de déduire la force exercée par le moteur pour
peler le ruban adhésif. Cependant, la résolution temporelle du capteur est limitée (environ 0,1 s), nous
n’avons alors pas accès à la force instantanée mais uniquement à sa moyenne au cours du pelage.
La plupart des expériences ont été réalisées en utilisant des films transparents pour rétroprojecteur
comme substrat, je reviendrai sur ce choix dans la troisième partie du rapport.
Au cours d’une expérience, l’angle de pelage θentre le substrat et le ruban évolue. Or il a été
montré que les caractéristiques de l’instabilité de stick-slip évoluent fortement avec θ[2]. Pour se
soustraire de cet effet, nous utilisons une longueur de ruban Limportante (L= 1 m pour toutes nos
expériences), ce qui nous donne une variation de 86°à 88°au cours d’une expérience, et nous permet
donc de considérer θconstant.
Des exemples d’images du front de pelage à 3 instants successifs sont présentées à droite sur la
figure 1. La zone claire correspond au Scotch collé sur le substrat et la zone sombre au Scotch déjà
pelé. À partir de la vidéo réalisée pour chaque expérience, nous utilisons un programme de traitement
d’image sous Matlab pour obtenir la position du front au cours du temps, ainsi que sa vitesse. En
fonction des conditions expérimentales utilisées, nous avons mis en évidence différentes dynamiques
de pelage.
2
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
1
/
24
100%