MS 205 Stabilité des structures ENSTA ParisTech

Introduction
Notions de stabilité et bifurcations
MS 205
STABILITÉ DES STRUCTURES
ENSTA PARISTECH
ENSTA ParisTech – MS 205 Stabilité des structures
Introduction
Notions de stabilité et bifurcations
STABILITÉ DES STRUCTURES
Iproblème général de la stabilité :
sous l’effet de perturbations (à définir...), l’état d’un système
va-t-il perdurer ou être modifié ?
ISous l’action d’efforts extérieurs:
–statique
–dynamique
Iune structure initialement stable peut montrer:
Iune déformation statique (cas du flambement)
Ides oscillations
(instabilité paramétrique, instabilité de flottement, ...)
ENSTA ParisTech – MS 205 Stabilité des structures

Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
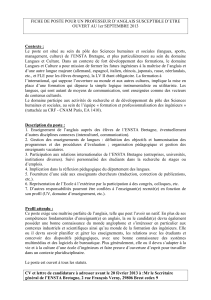
FLAMBEMENT D’UNE POUTRE DROITE
ENSTA ParisTech – MS 205 Stabilité des structures
Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
FLAMBEMENT D’UNE POUTRE DROITE
Questions auxquelles le cours souhaite répondre:
IPeut-on prévoir la charge critique ?
IQue se passe-t-il au point de bifurcation ?
IPeut-on décrire et calculer les branches bifurquées ?
Quelle sera leur forme ?
ENSTA ParisTech – MS 205 Stabilité des structures

Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
FLAMBEMENT D’UNE POUTRE DROITE
Influence des conditions aux limites
ENSTA ParisTech – MS 205 Stabilité des structures
Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
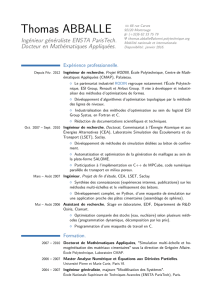
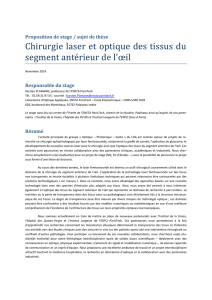
FLAMBAGE DE COQUE MINCE
Réservoirs cylindriques de vin en acier, Californie, 1979
Expérience contrôlée en laboratoire
ENSTA ParisTech – MS 205 Stabilité des structures

Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
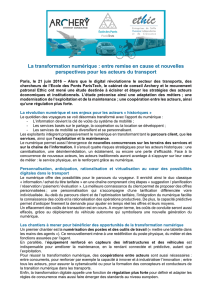
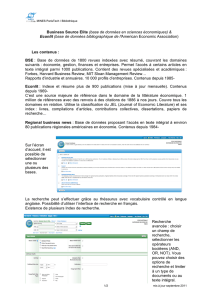
COQUE MINCE SOUS SON PROPRE POIDS
Flambage d’un conteneur
Flambage d’une éolienne
ENSTA ParisTech – MS 205 Stabilité des structures
Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
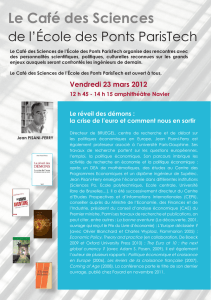
VOILEMENT ET DÉVERSEMENT
IVoilement : flambement d’une structure élancée
bidimensionnelle (plaque ou coque)
IDéversement : flambement mêlant mouvement de flexion et de
torsion.
ENSTA ParisTech – MS 205 Stabilité des structures

Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
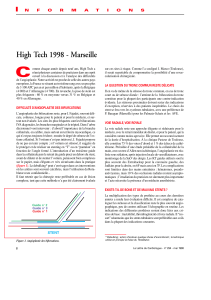
FLAMBAGE THERMIQUE
(a) (b)
ENSTA ParisTech – MS 205 Stabilité des structures
Introduction
Notions de stabilité et bifurcations
Exemples
Systèmes mécaniques, systèmes dynamiques
EN INTERACTION FLUIDE-STRUCTURE
IInstabilité du tuyau d’arrosage
IFlottement d’une aile d’avion
ENSTA ParisTech – MS 205 Stabilité des structures
 6
7
8
9
10
11
12
13
14
15
16
17
6
7
8
9
10
11
12
13
14
15
16
17
1
/
17
100%