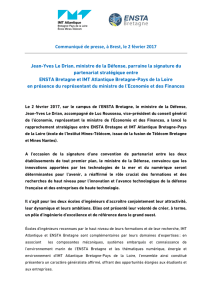
AM_Poster_Visite2009

Vidéo & Mouvement
Analyse automatique de séquences d’images
DETECTION ESTIMATION POURSUITE
Vidéosurveillance ultra-basse
consommation
Poursuite automatique
aéroportée
Robotique autonome
Antoine Manzanera, Renaud Barate, Christine Dubreu, Toby Low
Localiser les
objets en
mouvement.
Mesurer la vitesse
apparente des
objets ou de la
scène mobile
Maintenir le
focus sur un
objet ou un point
de la scène
Détection tout temps et estimation robuste
Original Fond S-D
Variance S-D Détection
Estimation S-D
Rétine et Cortex
Caladiom
© Bertin Technologies
Synthèse non photo-réaliste pour l’évaluation
exhaustive d’un système de poursuite
© FLIR ATS
Poursuite par
centroïde
(distribution)
© FLIR ATS
Poursuite par
corrélation
(image)
Evitement d’obstacle
par équilibrage de
flux optique
Evitement d’obstacle
par détection de sol
Navigation autonome dans un couloir par
algorithme de vision évolué
Conception automatique d’algorithmes de
vision par programmation génétique.
A gauche : un exemple de programme évolué
Détection de sols par
apprentissage bayésien et
régularisation markovienne
Unité Electronique et Informatique –ENSTA ParisTech –http://uei.ensta.fr
Publications, Tutoriels et Cours, voir : –http://www.ensta.fr/~manzaner
1
/
1
100%