Aucun titre de diapositive - Fichier

R M
S B
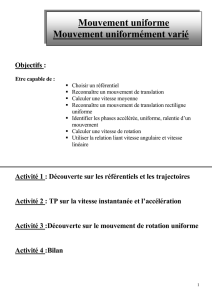
LA PHYSIQUE EST UNE SCIENCE EXPERIMENTALE
ELLE UTILISE LA MODELISATION
IL EST INDISPENSABLE DE COMPARER LES PREVISIONS
DU MODELE AVEC /¶(;3(5,(1&(. IL EST POUR CELA
SOUVENT NECESSAIRE DE FAIRE DES MESURES.

R M
S B
ELLE UTILISE DES MESURES
ÆVERIFIER DES PREDICTIONS
ÆDETERMINER DES PROPRIETES ET DES CONSTANTES
ÆETABLIR DES LOIS ET DES RELATIONS
ÆCONTROLLER LES TECHNIQUES ET LES INSTRUMENTS

R M
S B
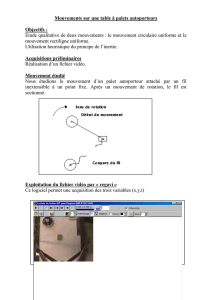
UNE GRANDEUR : LA PRESSION
*5$1'(857RXWDWWULEXWG¶XQSKpQRPqQHVXVFHSWLEOHG¶rWUH
distingué et mesuré (repérable et mesurable)

R M
S B

R M
S B
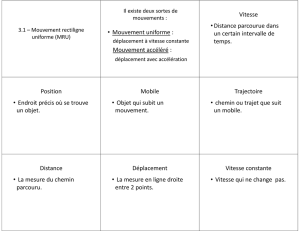
NOTION DE DIMENSION
ON PEUT ASSOCIER A CHAQUE GRANDEUR UNE DIMENSION
ÆGRANDEURS FONDAMENTALES
Longueur L
Masse M
Temps T
ÆGRANDEURS DERIVEES
Vitesse : L.T-1
Accélération : L.T-2
Force : M. L.T-2
:
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
1
/
61
100%