présentation des matériels et équipements de - Infoterre

BUREAU DE RECHERCHES GÉOLOGIQUES ET
MINIÈRES
SERVICE
GÉOLOGIQUE
NATIONAL
B.P.
6009
-
45060
Orléans
Cedex
- Tél.: (38) 63.80.01
PRÉSENTATION
DES
MATÉRIELS
ET ÉQUIPEMENTS
DE
MICROCENTRALES HYDROÉLECTRIQUES
par
J. ROUX
SERVICE
GÉOLOGIQUE
NATIONAL
SOUS-DIRECTION
A
L'ÉNERGIE
Mission hydroénergie
B.P.
6009 - 45060
Orléans
Cedex - Tél.: (38)
63.80.01
80 SGN 737 HEN
Octobre
1980
Réalisation
:
Département des
Arts
Graphiques


RESUME
Ce rapport vient en complément des journées d'information sur les
kyd>wé¿£C&iyLquz¿ qui se sont tenues du 17 au 21 mars 1980 à
Grenoble.
Il présente une description sommaire des appareillages [et de leur
fonctionnement) nécessaires à la transformation et au transport de l'énergie
hydraulique sous une forme utilisable.
Partant de la source et remontant jusqu'à l'utilisation, nous
verrons successivement :
- les turbines hydrauliques,
- les systèmes de régulation,
- les génératrices électriques,
- la transformation et le transport du courant.
Ceci n'est bien sûr qu'un aperçu général des diverses techniques
utilisées et n'a aucune prétention si ce n'est celle de rappeler des notions
fondamentales utiles aux projeteurs.

SOMMAIRE
I
-
INTROVUCTION
7
II -
LES
TURBINES
HWRAULIQUES
2
11.1.
Vé^lnitloni, 2
11.2. VLbpo&iXÂjon
Q2.Yitn.aJit
-
Vlagtiarme.
de.
vl£e¿>&e¿>
2
11.3.
Action
du
fluide,
¿un
lzt>
paAol¿>
du
canaux
-
Relation
d'EULER
4
11.4.
CaZcuJL
du
couple. txzAco. ¿un.
V
anbtit
du la
machine.
5
11.5.
Hauteur
blute.,
nette,
et
z^zctLvz
-
nenàmexuA
6
11.6.
Ve.ghÂ
de.
n.la.ctÂ.on
S
ll.J.
Notion de. vlte¿&e.
¿pzcl^lquz
S
U.S.
Application
à la
cla&ól^lcatlon
de¿
txüibomachlneÁ
9
11.9.
VeAcJvtptlon
¿ommaJJie.
de¿
dlfátnzntz&
tutblnej,
11
11.10.
Ve.veJLoppejne.ntb
¿pé.cl^lqueJ>
aux
mlcnoczntnaleM
14
III -
LA
REGULATION
VES
GROUPES
77
III.
7.
Vfüjiclpe.
Qlntfuxl
dz la. fíÍQulation _ 17
111.2.
RéQulateuAA
mícanlqueA
IS
1II.3. Rzgulatewa
M.e.cüUque¿
IS
If -
APPAREILLAGE
VE
PRQEuCTÎfflf^&-TRAMSfORMATIOM
ET VE
TRANSPORT
VE
79
L'ENERÇté
HVVRAULIQUE
IV. 1. Production
d'é.neA.g¿&
poun
un
n.é¿ejxii
autonome.
19.
IV.1.1.
Les génératrices
synchrones
79
IV.1.2.
Les génératrices à
courant continu
2
7
IV.2.
Production d'èneAgle,
poun.
un
n.l&e,au
couplé
24
II/.3.
TMLn&ionmatlon
et
tAampoit de, 1'é.neAgle.
26
IV.3.1.
Transport
du
courant
26
IV.3.2.
Transformation
du
courant
27
V
-
CONCLUSION
:
BILAN
GENERAL VUNE
INSTALLATION
WVROELECTRIOUE
29
o
>
o

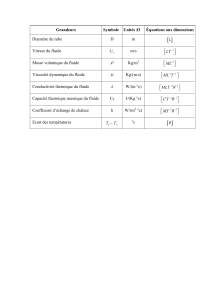
LISTE
DES
SYMBOLES
Symboles grecs
u
W
P
n
a
ai
tu1
ai"
COB <P
vitesse de rotation de la roue (rd/s)
d'une
turbine
poids volumique du fluide ; SP = pg
masse volumique du fluide
rendement
degré de réaction
vitesse de synchronisme des machines électriques
vitesse hyposynchrone
vitesse hypersynchrone
coefficient de puissance : P = UI cos
<f>
; où
<p
est le déphasage entre
la tension et l'intensité du courant
Symboles latins
u
W
N
q
h
z
J
P
Ah
u
g
m
vitesse absolue du fluide
vitesse d'entraînement du fluide =
ai
Ar (r = rayon polaire)
vitesse relative du fluide par rapport à la roue : W = C - u
vitesse de rotation de la roue en tr/s (N =
-^-}
2ir
débit massique (Kg/s) q = pq..
débit volumique (m3/s)
couple mécanique
hauteur de chute ou charge hydraulique
cote des niveaux
d'eau
perte de charge totale (dans la partie hydraulique)
puissance
pertes de charge réparties entre 1 et 2
accélération de la pesanteur (dans la partie hydraulique)
vitesse spécifique (tr/s)
inertie des parties tournantes
courant d'induction
courant induit (dans la partie électrique)
tension aux bornes de deux conducteurs
glissement (dans la partie électrique)
rapport de transformation
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
1
/
37
100%