Etude pale éolienne : Statique et Dynamique

1/7
Etude statique et dynamique d’une pale pour éolienne à axe horizontal
Static and dynamic study of a blade for wind mill with horizontal axis
HAMDI H.1*, MRAD C.2*, NASRI R.3*
1 : Institut Supérieur des Etudes Technologiques de Radès
2, 3 : Ecole Nationale d’Ingénieurs de Tunis
* : Unité de Recherche Génie des Matériaux
Mail : Hed[email protected]
RESUME :
Dans ce travail on présente une démarche de calcul des pales pour éolienne à axe horizontal. Une
pale doit fournir le rendement maximal et résister aux efforts aérodynamiques répartis sur sa longueur,
qui sont fonctions de ses caractéristiques géométriques et de la vitesse du vent. Pour cela on a écrit les
relations qui déterminent ces efforts en fonction de la vitesse d’écoulement du vent puis on les a
intégrées dans les lois de mécanique de la structure pour aboutir aux équations de mouvement de la
pale. On a appliqué cette démarche à une pale vrillée de longueur 1,9 mètre, construite par une seule
couche en tôle d’aluminium emboutie et de profil de type NACA 4412. Ce profil donne le meilleur
rendement aérodynamique et la pale est un élément d’une hélice tripale pour éolienne de puissance
maximale 5 kW. Enfin on a visualisé ses déformations puis vérifié sa tenue en service.
MOTS CLES : éolienne, hélice, pale, vent, rendement, efforts, déformations.
I- INTRODUCTION :
L’énergie renouvelable des éoliennes devient aujourd’hui non négligeable avec l’augmentation du
débit du vent dans les régions terrestres ou offshore notamment au Cap Bon de la Tunisie où l’énergie
moyenne annuelle est comprise entre 1,8 et 3,24 GJ/m2 de la surface éolienne installée [1]. Les
éoliennes à axe vertical Darrieus et Savonius ou à axe horizontal sont des systèmes de conversion
d’énergie aérodynamique en énergie électrique. L’énergie aérodynamique est récupérée en plaçant
contre le sens d’écoulement du vent une hélice, à pales multiples, montée sur un rotor à l’entrée d’un
multiplicateur de vitesse qui entraine à son tour un générateur de courant branché, par l’intermédiaire
d’un circuit électrique avec des accumulateurs. Un système de freinage asservi, sert à ralentir la rotation
du rotor pour protéger le générateur électrique en cas d’une rafale de vent. L’ensemble est monté dans la
nacelle pivotante, autour de la matrice implantée verticalement au sol, par un système de gouvernail.
II- EFFORTS AERODYNAMIQUES SUR LA PALE :
Selon la théorie de Betz [2], une pale ne peut avoir un rendement aérodynamique supérieur à 59% qui
est appelé : limite de Betz. Aujourd'hui dans la pratique on arrive tout juste à avoir un rendement de
50% pour les dernières éoliennes et donnant le minimum d’interférence d’écoulement à travers les pales.
La puissance mécanique récoltée par l’hélice croit surtout avec le diamètre de la surface balayée par les
pales comme le montre la figure 1.
Fig. 1 : Relation entre le diamètre de l’hélice
et sa puissance [3]. Fig. 2 : Démarche de validation d’une pale.
Corrections
Choix du profil de la pale
donnant le rendement maximal
Conception de la pale et choix
des matériaux
Vérification de sa résistance aux
efforts aérodynamiques
Essai pratique de la pale
Pale validée

2/7
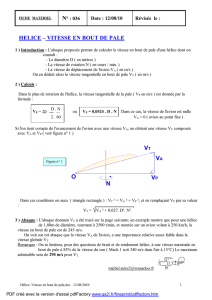
L’organigramme de la figure 2 montre la démarche adoptée pour valider une pale d’éolienne et par
conséquence garantir le meilleur rendement en assurant sa résistance aux efforts aérodynamiques. Les
caractéristiques géométriques d’un profil de pale sont: la corde c, les hauteurs d’extrados et de l’intrados
(voir exemple sur la figure 7) et l’angle de vrillage θ. Le choix des profils, leur répartition, l’évolution
de la corde et l’angle de vrillage en fonction de l’envergure doivent être soigneusement étudiés afin
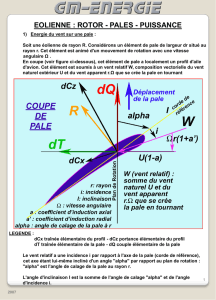
d’optimiser la conversion d’énergie. Les efforts aérodynamiques de poussée P et de trainée T, exercés
au centre de poussée C, dépendent des caractéristiques géométriques du profil de la pale et de la vitesse
du vent V [4].
x
y
U
1
V
dP
dT
dR
c
i
C
G
z0
W
Fig. 3 : Hélice d’éolienne [5]. Fig. 4 : Vitesses et efforts aérodynamiques.
G est le centre d’inertie de la section de la pale et (O, x0, y0, z0) le repère fixe lié à la nacelle supposée
immobile par rapport à la matrice de l’éolienne. La relation entre la vitesse d’impact V1 et du vent V en
amont de l’hélice est donnée par [6] comme suit :
11,
2
a
VV
(1)
où a est le coefficient d’interférence axial compris entre 0 et 1. La vitesse induite U de l’air par rotation
de la pale est donnée par :
(1 ') , U a r
(2)
où a’ est le coefficient d’interférence radial compris entre 0 et1 et r le rayon de l’élément de pale (voir
figure 3). Ils en résultent par sommation la vitesse relative W d’écoulement de l’air par rapport à la pale
(voir figure 4). On calcule l’angle d’incidence i en fonction de θ et des deux vitesses V1 et U à partir de
la même figure par :
1
( ).i arctg U V
(3)
En négligeant les effets de sillage (a’=0), la théorie d’élément de pale [6] donne la variation de la
force de trainée dT, exercée sur un élément infinitésimal de la pale d’épaisseur dr et situé à une distance
r de l’axe du rotor, par :
22
2
1,
4 (1 )
anc V
dT dr
ar
(4)
où n est le nombre des pales dans l’hélice et ρa la masse volumique de l’air supposé incompressible.
En supposant que la résultante des efforts aérodynamiques R est perpendiculaire à la corde c de la
section, on écrit :
( ).dP dT tg
(5)
Le coefficient de puissance Cp d’une hélice d’éolienne, en cas d’écoulement permanent et isotherme
de l’air, est définit par :
p2
(1 a) (1-a).
Puissance récoltée 1
CPuissance disponible 2
(6)
Le rapport de vitesse λ est définit par :
,
R
V
(7)
où R est la longueur de la pale et Ω sa vitesse de rotation angulaire. Ce rapport dépend essentiellement
du coefficient de puissance Cp de l’éolienne selon le tableau 1 issue de l’expérimentation [7]. Ce tableau
permet d’estimer la valeur de la vitesse de rotation angulaire de l’hélice à une vitesse donnée
d’écoulement du vent.
Tableau 1 : Valeurs des coefficients λ et Cp pour une éolienne rapide [7].
λ
0
1.3
2.1
2.7
3.4
5
5.8
6.3
Cp
0
0.1
0.2
0.3
0.4
0.3
0.2
0.1

3/7
III- EQUATIONS DE MOUVEMENT DE LA PALE :
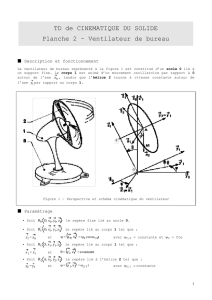
On a utilisé la méthode des éléments finis pour aboutir aux équations de mouvement de la pale. Pour
cela on l’assimile à une poutre rectiligne de section droite variable, de poids négligeable, soumise aux
efforts aérodynamiques répartis sur sa longueur et encastrée à son extrémité sur le moyeu du rotor. Cette
pale est décomposée en dix éléments de sections différentes comme le montre la figure 6 :
y0
x0
z
12
345678910
y
Ωt
x
O
Fig. 5 : Pale fractionnée en dix éléments. Fig. 6 : Pale discrétisée par éléments finis.
Le vecteur de déplacements nodaux qe est exprimé dans le repère lié à la pale (O, x, y, z) par :
( , , , , , , , , , , , ).
Ti i i i i i j j j j j j
u v w u v w
e
q
Les indices i et j sont liés respectivement à l’origine et l’extrémité de chaque élément fini. On note
les déplacements du centre d’inertie G relatifs aux axes respectifs x, y et z : u, v et w et les angles de
rotation de la section autour des axes respectifs x, y et z : α, β et γ. Les deux fonctions d’interpolation
utilisées, dans l’application des lois de comportement, sont linéaires isoparamétriques centrées [8] :
N1=(1-s)/2 et N2=(1+s)/2 (8)
s : variable comprise entre -1 et 1.
0
x
s
M
M
i
i-1j
-1 1
Fig. 7 : Maillage de la poutre.
On suppose que le matériau de la pale est élastique linéaire homogène et isotrope de masse
volumique ρ, de module d’Young E, et de module de cisaillement G, chaque élément fini est de section
S constante (voir figure 6), de longueur l et de moments quadratiques relatifs aux axes respectifs Gx, Gy
et Gz : Ix, Iy et Iz. En tenant compte du cisaillement transverse (poutre épaisse), en cas de petites
déformations à température constante et en négligeant l’effet de gauchissement des sections, on a
déterminé la matrice élémentaire de rigidité Ke relatif à l’élément fini numéro e :
/ 0 0 0 0 0 / 0 0 0 0 0
0 / 0 0 0 /2 0 / 0 0 0 /2
0 0 / 0 /2 0 0 0 / 0 /2 0
0 0 0 / 0 0 0 0 0 / 0 0
0 0 /2 0 / /3 0 0 0 /2 0 /6 / 0
0 /2 0 0 0 / /3 0 /2 0 0 0 /6 /
/ 0 0 0 0 0 / 0 0 0 0 0
0 / 0 0
ES l ES l
GS l GS GS l GS
GS l GS GS l GS
GIx l GIx l
GS EIy l lGS GS lGS EIy l
GS EIz l lGS GS lGS EIz l
ES l ES l
GS l
e
K
0 /2 0 / 0 0 0 /2
0 0 / 0 /2 0 0 0 / 0 /2 0
0 0 0 / 0 0 0 0 0 / 0 0
0 0 /2 0 /6 / 0 0 0 /2 0 / /3 0
0 /2 0 0 0 /6 / 0 /2 0 0 0 / /3
GS GS l GS
GS l GS GS l GS
GIx l GIx l
GS lGS EIy l GS EIy l lGS
GS lGS EIz l GS EIz l lGS

4/7
L’étude dynamique d’un élément fini de la poutre donne la matrice élémentaire de masse Me :
/3 0 0 0 0 0 /6 0 0 0 0 0
0 /3 0 0 0 0 0 /6 0 0 0 0
0 0 /3 0 0 0 0 0 /6 0 0 0
0 0 0 /3 0 0 0 0 0 /6 0 0
0 0 0 0 /3 /3 0 0 0 0 /6 /6
0 0 0 0 /3 /3 0 0 0 0 /6 /6
/6 0 0 0 0 0 /3 0 0 0 0 0
0 /6 0 0 0 0 0 /3 0 0 0 0
0 0 /6 0 0 0 0 0 /3 0 0 0
0 0 0 /6 0 0 0 0 0 /3 0 0
0 0 0 0 /
SS
SS
SS
Ix Ix
Iy Iyz Iy Iyz
Iyz Iz Iyz Iz
lSS
SS
SS
Ix Ix
Iy
e
M,
6 /6 0 0 0 0 /3 /3
0 0 0 0 /6 /6 0 0 0 0 /3 /3
Iyz Iy Iyz
Iyz Iz Iyz Iz
la matrice élémentaire de couplage gyroscopique Ce :
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 /3 2 /3 0 0 0 0 /6 /3
0 0 0 /3 0 0 0 0 0 /6 0 0
0 0 0 2 /3 0 0 0 0 0 /3 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 /6 /3 0 0 0 0 /3 2 /3
0 0 0 /6 0 0 0 0 0 /3 0 0
0 0 0 /3 0 0 0 0
I Iyz I Iyz
II
Iyz Iyz
l
I Iyz I Iyz
II
Iyz
e
C,
0 2 /3 0 0
Iyz
Ixy, Ixz et Iyz sont des produits d’inertie et I est définit comme suit :
. I Ix Iy Iz
(9)
En négligeant le moment de torsion induit par les efforts aérodynamiques autour de la pale ceci en
supposant que les contres G et C(voir figure 4) sont confondus, le vecteur force généralisée Fe en phase
de rotation uniforme de la pale est donné ci-dessous.
Ce vecteur est composé de la force centrifuge de
l’élément fini de direction Ox et de module :
2.
2
ij
c
xx
F lS
(10)
Les deux constantes de force T0 et P0 se
calculent par°:
22
02
1,
4 (1 )
anc V
Ta
(11)
0
0()
T
Ptg
(12)
où xi et xj sont respectivement les abscisses des
nœuds consécutifs numéro i et j (voir figure 7).
2
0
0
2
0
0
(2 )
6
( ln( ) 1)
(1 ln( ))
0
0
0
( 2 )
6
(1 ln( ))
( ln( ) 1)
0
0
0
ij
e
ij
lS xx
xj xj
Pl xi
xj xj
Tl xi
lS xx
xi xj
Pl xi
xi xj
Tl xi
F

5/7
Après assemblage et construction des matrices K, M et C en tenant compte des conditions aux limites,
d’encastrement de la pale sur le moyeu du rotor et en supposant que le vecteur force F n’est pas influé par la
variation des caractéristiques géométriques des sections au cours de ses déformations, on obtient les
équations de mouvement de la pale sous cette forme :
.
.
M q C q Kq F
..
(13)
L’équation aux pulsations est exprimée dans le plan complexe par :
20, j
K M C
(14)
ses solutions en ω ne sont autres que les vitesses critiques qui peuvent être la cause d’une résonance de la
pale en cas où sa vitesse de rotation les atteint.
IV- APPLICATION A UNE PALE VRILLEE :
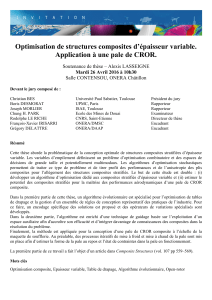
On s’intéresse à l’étude du comportement d’une pale pour hélice de rayon deux mètre capable de
produire une puissance maximale d’environ 5kW. Il existe plusieurs profils de pale tels que NREL, NASA,
etc… mais le meilleur rendement correspond au profil NACA 4412 [9].
Fig. 8 : Géométrie du profil NACA4412 [9].
La pale à étudier est vrillée d’angle de vrillage maximal égal 42° à 10% d’envergure, le rotor de l’hélice
est de rayon 0,1m. Cette pale est construite en tôle d’aluminium EN AW 5754, emboutie et d’épaisseur 2,5
mm ce métal convient mieux pour fabriquer une pale de petite taille. On a conçue cette pale par le logiciel
SolidWorks (voir figure 5) qui a donné les caractéristiques géométriques suivantes :
Tableau 2 : Caractéristiques géométriques de chaque élément fini de la pale.
e
θ (°)
c (mm)
l (m)
S (mm2)
Ix (mm4)
Iy (mm4)
Iz (mm4)
Iyz (mm4)
1
42
182
0.1
921
2649631.22
1459543.66
1190087.56
1246257.14
2
40.9
165
0.2
838
1995919.04
1124456.86
871462.18
928288.37
3
40.2
147
0.2
750
1432211.46
827012.25
605199.21
658067.03
4
39.3
130
0.2
665
993371.59
592211.23
401160.59
448934.34
5
38.5
112
0.2
577
654064.62
403634.27
250430.35
286367.48
6
36.3
95
0.2
488
399028.23
258165.08
140863.15
168237.62
7
33.7
78
0.2
402
225192.82
155220.85
69971.97
88137.23
8
29.2
61
0.2
319
113613.46
85599.21
28014.25
38447.38
9
17
46
0.2
243
50612.09
42667.54
7944.55
11664.74
10
10
36
0.2
180
21111.81
19885.31
1226.5
120.13
Tableau 3 : Propriétés de l’aluminium 5754 et de l’air en conditions ambiantes de température (25°C)
et pression (1atm).
ρ (Kg/m3)
ρa (Kg/m3)
E (N/mm2)
G (N/mm2)
2750
1.25
71110
27350
 6
7
6
7
1
/
7
100%