a2 - Tunisia

1
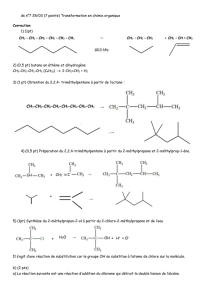
Présentation :
Le système ci-dessus, permet de tronçonner (découper) automatiquement des tronçons d’arbre en vue
d’utiliser dans une cheminée.
Le système est constitué par :
Un vérin pneumatique« V1 » pour le découpage verticale (commander par le distributeur
« M1 »).
Un vérin pneumatique « V2 » pour le découpage horizontale (commander par le
distributeur « M2 »).
Un moteur électrique « Mt2 » porteur de scie « Sc » pour le découpage verticale
(commander par le contacteur « KM2 »).
Un tapis d’arrivée « Ta » pour amener le tronçon entrainer par un moteur électrique
« Mt1 » (commander par un contacteur « KM1 »).
Un tapis d’évacuation « Te » pour évacuer les morceaux du tronçon entrainer par un
moteur électrique « Mt3 » (commander par un contacteur « KM3 »).
Fonctionnement :
Un appui sur le bouton poussoir « m » provoque le départ de cycle suivant.
L’amené du tronçon par le tapis d’arrivée « Ta » détecter par le capteur So.
Découpage du tronçon verticalement
Avance de la tige de vérin « V2 » et rotation de scie « Sc ».
Puis
Recule de la tige de vérin « V2 » et rotation de scie »Sc ».
Découpage des deux parties de tronçon par l’avance de la tige de vérin « V2 » et les couteaux
« Co ».
Evacuation des morceaux du tronçon par le tapis « Te » entrainer par le moteur « Mt3 » pendant
5s.

2
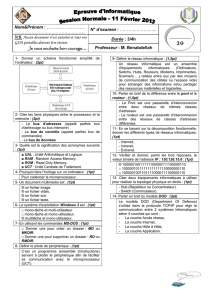
I / Analyse descendante (SADT ).
1/ Compléter l’actigramme de niveau AO en utilisant les données ci-dessous. 4pt
Compte rendu. we . Gérer. Découper verticalement. Evacuer les morceaux ………
II/ GRAFCET
Identifier les éléments technologiques réalisant les actions correspondantes 2pt
Lycée : M’HAMDIA
DEVOIR DE SYNTHESE N ° 01
TECHNOLOGIE
Durée : 2 heures
Date :……/12/2011
Nom :…………………….… Prénom : ………………………….. Classe : 2Sc (1,2) N° : ……….
N°
tâche
Action donnée par les effets des
actionneurs
Actionneur
correspondant
Pré actionneur
correspondant
Capteur détectant la
fin de l’action
0
Attendre
1
………………………………
2
………………………………
3
………………………………
4
………………………………
5
………………………………
6
………………………………
7
……………………………………….

3
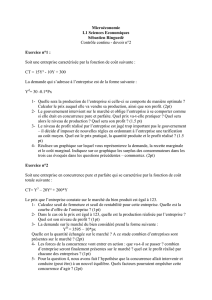
2/ Compléter les GRAFCET d’un point de vue de la partie opérative et d’un point de vue de la partie
commande.
Partie opérative 1pt Partie commande 1pt
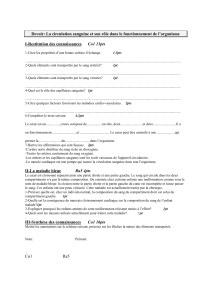
III/ définition graphique d’un produit.
Produit : capteur pneumatique L21. (Voir dessin d’ensemble page 4).
A/ dessin d’ensemble.
1/ les deux pièces (2) et (3) sont elles de même matière ? Justifier ta réponse. 1pt
…………………………………………………………………………………………………………..
…………………………………………………………………………………………………………..
2/ Quel est le mouvement d’entrée(a) et de sortie (b) du capteur. 1pt
a …………………………………………… b…………………………………………………………
3/ Quel est le course maxi de l’axe (8). 1pt
……………………………………………………………………………………………………………
4 / déterminer les liaisons mécaniques suivantes. 1.5pt
Entre (2) /(3)
Entre (8) / (4)
Entre (3) /(4)
…………………………………..
……………………………………..
……………………………………

4
CAPTEUR PNEUMATIQUE
1. Présentation :
Le capteur pneumatique représenté sur le dessin d’ensemble, est un composant pneumatique utilisé comme
détecteur de fin de course d’un vérin pneumatique
Nom :…………………….… Prénom : ………………………….. Classe : 2Sc (1,2) N° : ……….
8
1
axe
Acier
7
1
goupille
acier
6
1
chape
cuivre
5
1
galet
Acier
4
1
corps
aluminium
3
1
support
Acier
2
1
levier
acier
1
1
butée
acier
Rep
Nb
Désignation
Matière
Observateur

5
B/ cotation fonctionnelle.
1/cote tolérencée.
a) compléter le tableau ci-dessous. 2pt
2/ chaîne de cote (voir page 6).
On donne
a) donner l’équation de « Ja » en fonction de « a1 » « a2 » et « a3 ». 1pt
…………………………………………………………………………………….
b) calculer a2max et a2min
a2max :………………………………………………………………………………… 1pt
a2min :………………………………………………………………………………… 1pt
c) écrire « a2 » sous la forme
……………………………………………………………………………………. 0 .5pt
d) établir la chaîne de cote de « Jb » (voir page 6). 2pt
 6
6
1
/
6
100%