Sommaire 1. Présentation : 1.1. Présentation générale. page 3 1.2

1
Sommaire
1. Présentation :
1.1. Présentation générale. page 3
1.2. Présentation de la table : A quoi ça sert ? page 4
1.3. Composition et fonctionnement de la table. page 4
2. Analyse fonctionnelle :
2.1. Diagramme bête à corne. page 5
2.2. Diagramme SADT. page 5
2.3. Diagramme pieuvre. page 6
2.4. Analyse fonctionnelle interne :
Chaîne d’énergie et d’information. page 6
2.5. Diagramme FAST. page 7
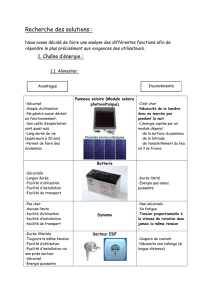
3. Recherche des solutions :
3.1. Chaîne d’énergie.
3.1.1. Alimenter. page 8
3.1.2. Distribuer. page 9
3.1.3. Convertir. page 9
3.1.4. Transmettre. page 10
3.2. Chaîne d’information.
3.2.1. Acquérir. page 11

2
3.2.2. Traiter. page 12
3.2.3. Communiquer. page 12
3.3. Solutions qui ont été prise. page 13
4. Modélisation et analyse mécanique du système :
4.1. Mise en plan des pièces du système. page 14
4.2. Chaîne cinématique.
4.2.1. Graphe des liaisons. page 14
4.2.2. Liaisons. page 15
4.2.3. Schéma cinématique en 3D. page 15
4.3. Modélisation sur Solidworks. page 16
5. Etude :
5.1. Vitesse de la Terre. page 18
5.2. Vitesse du moteur. page 18
6. Améliorations possibles : page 19
7. Autres solutions de tables équatoriales : page 19
8. Synthèse :
8.1. Synthèse sur la table. page 20
8.2. Synthèses personnelles. page 21

3
1. Présentation :
1.1. Présentation générale.
La Terre tourne sur elle-même autour de son axe polaire.
Elle effectue un tour complet, c'est-à-dire 360 degrés autour de son axe et les étoiles,
exactement en 23h 56mn 4s : c’est le jour sidéral.
Mais on remarque par rapport à nous, qui sommes les observateurs, ce sont les étoiles qui
tournent autour et non la Terre.
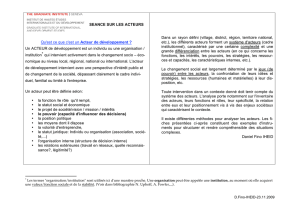
Si l’on voulait prendre une longue pose des étoiles avec un appareil photo parfaitement immobile,
on remarquerait alors les traces des étoiles, en forme d’arcs tournant autour du soleil, qui
bougent par rapport à nous. Cela fait que la photo est inutilisable pour, par exemple, une
exploitation scientifique.
Photo sur longue pose sans avec un appareil photo parfaitement immobile (sans table
équatoriale) :
Problème posé :
Réaliser des photographies des étoiles exploitables, c'est-à-dire nettes et sans arcs de
cercle.
Afin de résoudre ce problème posé, deux solutions se présentent à nous :
1ère solution:
Faire des photos à courtes poses (c'est-à-dire de quelques secondes) avec un appareil
immobile
Résultat de la solution n°1:
Les étoiles sont fines et peu nombreuses. Les photos ne seront donc pas exploitables.
2eme solution :
Faire des longues poses et suivre précisément le ciel dans sa rotation.
Résultat de la solution n°2:
Les photos sont plus nettes, plus précises et donc plus utilisables

4
Nous avons décidé de travailler sur la deuxième solution. Pour cela, nous devons réfléchir à un
support pouvant à la fois recevoir l'appareil photo et être capable de suivre la rotation de la
Terre où plutôt la compenser, la table équatoriale.
1.2. A quoi sa sert ?
Une table équatorial est un support pouvant recevoir un ou plusieurs types d’appareils
d’observations (appareil photo, télescope, …) et doit être montée suivant le principe de la
monture équatoriale.
Le principe de la monture équatoriale a pour but de permettre à un utilisateur d’une table
équatoriale de photographier le ciel (étoile, planète, …) tout en compensant le mouvement de
rotation de la Terre, ce qui lui permet d’obtenir des photos de l’astre nette.
1.3. Composition et fonctionnement de la table.
La table à monture équatoriale est constituée principalement de deux axes :
-Le premier axe est dit axe polaire et se voit être le plus important des deux.
Il porte l’instrument d’observation. Dans la plupart des cas il est accompagné d’une fourche pour
faciliter le pointage vers le pôle céleste nord qui correspond à l’étoile polaire.
-Le deuxième axe est l’axe de déclinaison. Il est perpendiculaire à l’axe polaire.
Notamment utilisé pour les télescopes, il relie l’axe au tube du télescope et permet de la faire
basculer pour suivre une déclinaison.
Une table équatoriale a un mode de fonctionnement particulier.
En effet, ce dernier se doit de suivre le principe de la monture équatoriale.
Pour ce faire, la table doit accomplir certaines conditions :
-Compenser le mouvement de rotation de la Terre : la table doit faire un mouvement de rotation
opposée à celle de la Terre
-Faire ce mouvement autour de l'axe nord-sud de la Terre (l’axe dans laquelle se trouve l’étoile
polaire) donc avoir un axe parallèle à ce dernier.
-Avoir une vitesse égale a celle de la Terre (soit en rad.s-1 ou en tr.min-1)
Schématisation du fonctionnement

5
2. Analyse fonctionnelle :
2.1. Diagramme bête à corne.
2.2. Diagramme SADT.
Compenser le mouvement de
rotation de la Terre permettant
ainsi de photographier ou de
filmer le ciel
Table
équatoriale
Observateur
Appareil photo
x position de
la table
Énergie
électrique
Compenser le mouvement de
rotation de la Terre permettant
ainsi de photographier ou de
filmer le ciel
Table équatoriale
Angle α + x
position de la
table
Vitesse
Rotation de
la Terre
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
1
/
21
100%