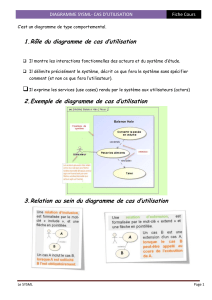
Présentation


* Rotation
autour de l’axe
Nord-sud
*Un tour en
23h 54mn 4s
=
Jour
sidérale
La Terre

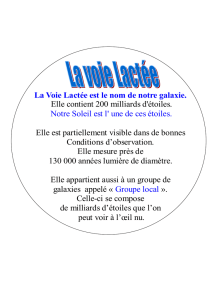
Photo sur longue pose avec un appareil photo parfaitement immobile
(sans table équatoriale)

Réaliser des photographies des étoiles
exploitables, c'est-à-dire nettes et sans arcs
de cercle.
Problématique

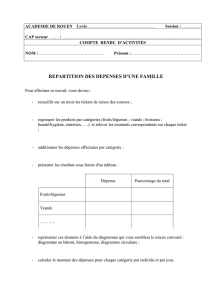
2 Solutions
1ère solution
2ème solution
*Photos à
courtes poses
(quelques
secondes)
*Photos à
longues poses
(plusieurs
minutes)
*Suivre
précisément le
ciel dans sa
rotation.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
1
/
29
100%