Agrégation de génie électrique - interne - 2007

136
AGRÉGATION
SESSION 2007
CONCOURS INTERNE
Section : GÉNIE ÉLECTRIQUE
Option B : ÉLECTROTECHNIQUE ET ÉLECTRONIQUE DE PUISSANCE
ÉTUDE D’UN SYSTÈME INDUSTRIEL
DURÉE : 8 HEURES, COEFFICIENT : 1
Calculatrice autorisée (conformément à la circulaire n° 99-186 du 16 novembre 1999)
Convertisseur en Euro autorisé
Aucun document n'est autorisé
FABRICATION DE PRODUITS ELECTROFONDUS
Ce sujet comporte 3 dossiers distincts :
Dossier de présentation, texte du sujet avec le travail demandé 20 pages
Documents réponses DRB1 et DRB2 2 pages
Documents techniques 50 pages
Ce sujet comporte trois parties indépendantes :
Partie A : étude de l’alimentation en énergie de l’entreprise
Partie B : étude du transfert des dalles à la sortie de la recuisson
Partie C : étude du groupe électrogène de secours de l’alimentation du four
Une lecture préalable et complète du sujet est indispensable.
Il sera tenu compte de la cohérence avec laquelle les candidats traiteront chaque partie, le jury préférant une
réflexion d’ensemble de la partie abordée à un éparpillement des réponses.
Les questionnements portant sur les développements pédagogiques se verront affectés de 60 % des points de
l’épreuve. Il est donc conseillé d’y consacrer 60 % du temps de l’épreuve.
Les candidats sont invités à numéroter chaque page de leur copie et à indiquer clairement le numéro de la
question traitée.
Les candidats sont priés de rédiger les différentes parties du problème sur feuilles séparées et clairement repé-
rées. Chaque question est identifiée par une police gras et repérées par un numéro.
Il leur est rappelé qu’ils doivent utiliser les notations propres au sujet, présenter clairement les calculs et déga-
ger ou encadrer tous les résultats.
Tout résultat incorrectement exprimé ne sera pas pris en compte. En outre les correcteurs leur sauront gré
d’écrire lisiblement et de soigner la qualité de leur copie.
Il sera tenu compte de la qualité de rédaction, en particulier pour les réponses aux questions ne nécessitant pas
de calcul. Le correcteur attend des phrases complètes respectant la syntaxe de la langue française.
Pour la présentation des applications numériques, il est rappelé que lors du passage d’une forme littérale à son
application numérique, il est recommandé aux candidats de procéder comme suit :
- après avoir rappelé la relation littérale, chaque grandeur est remplacée par sa valeur numérique en res-
pectant la position qu’elle avait dans la relation puis le résultat numérique est donné sans calculs intermé-
diaires et sans omettre son unité.
Si le texte du sujet, de ses questions ou de ses annexes, vous conduit à formuler une ou plusieurs hypothèses,
il vous est demandé de la (ou les) mentionner explicitement dans votre copie.
!

137
Fabrication de produits électrofondus
Présentation de la société
Cette société internationale fabrique des produits réfractaires
électrofondus pour les fours de verriers.
L’usine étudiée est une grande consommatrice d’énergie
électrique, elle est alimentée par 2 sources indépendantes :
♦ un réseau principal en 225 kV
♦ un réseau secours en 63 kV
L’usine est un gros client dont les charges maximales composées
de fours électriques à arc peuvent atteindre 50 MVA.
Présentation de l’unité de fabrication étudiée
Il s’agit d’une unité de production de blocs réfractaires électrofondus, et principalement de pièces
destinées à la construction de fours verriers. Ces produits sont obtenus par fusion en fours électriques à
très haute température d’oxydes métalliques très purs. Les blocs réfractaires fabriqués par cette unité
équipent actuellement environ 5000 fours de verriers dans le monde.
La plupart de ces produits ont des propriétés exceptionnelles de résistance à l’usure, à la tempéra-
ture et à la corrosion chimique ainsi que des caractéristiques de pureté qui expliquent leur emploi fré-
quent dans des industries de haute technologie.
Ceci implique :
¾ Une alimentation en énergie adaptée aux puissances mise en jeu
¾ Une alimentation et un stockage des produits de base
¾ Une unité pilote complète pour la mise au point des procédés et des produits
¾ Plusieurs fours de fusion
¾ Des unités de transfert et de refroidissement des blocs
¾ Des unités d’usinage et d’assemblage des différents blocs réfractaires
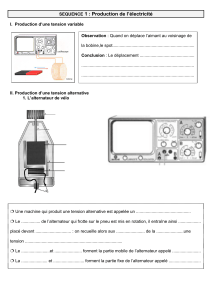
Le procédé général de fabrication s’inscrit dans huit grandes phases :
1) L’étude technique afin de proposer aux clients des solutions adaptées
2) La fabrication du moule
3) La composition d’une charge avec les matières premières
4) La fusion dans un four à arc électrique
5) La coulée dans des moules en sable aggloméré, en graphite ou en métal
6) La recuisson dans des arches de recuisson pour contrôler le refroi-
dissement des pièces jusqu’à la température ambiante
7) Le finissage au moyen de différentes techniques de nettoyage, polissage,
sciage du trou de coulée et usinage par outils diamantés.
8) Le prémontage des différents éléments des fours,

138
Cycle de fabrication type
Points traités dans ce sujet
L’alimentation en énergie de l’usine, la distribution HTA et l’alimentation d’un four
Actuellement l’usine est alimentée en énergie électrique par une ligne EDF de 225 kV. Celle-ci
arrive dans le poste général "01 " de transformation HT, appelé "Rougier", abaissant les tensions de
225 kV en 15 kV.
Ce transformateur a une puissance de 52 MVA et un poids total de 120 t (dont 30 t d'huile de re-
froidissement), il dispose de 2 secondaires délivrant une tension de 15 kV.
L'usine possède par contrat avec EDF, une ligne de secours 63 KV qui arrive dans le poste gé-
néral "01" Rougier (secours). Cette ligne 63 kV est constituée de 4 transformateurs de 12 MVA
63 kV/15 kV. Le réseau HTA est constitué de plusieurs boucles.
L’usine comprend 26 postes de distribution HTA, dont 7 postes pour les fours de l'usine et 1 poste pour
le laboratoire. La puissance unitaire des transformateurs HTA/BT varie de 160 kVA pour certaines unités
de différents secteurs à 5 MVA pour les fours.
Modification de la motorisation du pont roulant de l’arche de recuisson
Le pont est constitué d’un chariot de direction, d’un mât de levage, d’une pince de préhension et d’une
cabine accrochée au chariot de direction.
Le bloc moteur de direction permet d’obtenir 3 vitesses : Très Petite Vitesse, Grande Vitesse et Petite
Vitesse.
La structure du bloc moteur de translation est identique au bloc de direction.
La transmission des mouvements se fait par chaînes et pignons.
L’alimentation secourue du refroidissement du four
Un groupe électrogène permet de secourir le système de refroidissement du four.
Ce groupe est de marque SDMO, équipé d’un moteur Renault et d’un alternateur Leroy Somer de
1 290 kVA 400 V.
L’alternateur du type LS 50.1 est équipé d’un régulateur R 449.

139
Organisation de ce sujet
Il se décompose en 3 parties indépendantes qui se décomposent elles mêmes en sous partie :
Partie A : étude de l’alimentation en énergie de l’entreprise
A1 : généralités sur l’ouverture du marché de l’énergie
A2 : étude de l’alimentation HTB de l’entreprise
A3 : étude de l’alimentation HTA de l’entreprise
Ö A31 : généralités
Ö A32 : étude du transformateur HTB/HTA N°1
Ö A33 : analyse d'un défaut au secondaire du transformateur
Ö A34 : analyse de la mise sous tension des batteries de condensateurs
A4 : étude du transformateur du poste 18
A5 : étude du transformateur du four A
A6 : étude du pré dimensionnement des conducteurs d’alimentation des électrodes
Ö A61 : dimensionnement des tubes de cuivre
Ö A62 : dimensionnement des câbles souples
Partie B : étude du transfert des dalles à la sortie de la recuisson
B1 : analyse du suivi d’une affaire
B2 : étude de la solution existante du mouvement de translation du pont
Ö B21 : étude de la chaîne cinématique
Ö B22 : étude de la variation de vitesse
B3 : étude de la nouvelle motorisation du mouvement de translation
Ö B31 : choix de la nouvelle motorisation
Ö B32 : choix du câble du moteur de translation
Ö B33 : étude de l’alimentation électrique du variateur
B4 : automatisme et choix de capteur
Ö B41 : choix du capteur de position
Ö B42 : automatisation du déplacement des dalles
Partie C : étude du groupe électrogène de secours de l’alimentation du circuit de refroidissement
du four
C1 : caractéristiques technologiques du Groupe
C2 : étude de l'alternateur
Ö C21 : comportement de l’alternateur lors d’un court-circuit triphasé
C3 : régulation de la tension de l'alternateur
Ö C31 : principe et intérêt de ce type d’excitation
Ö C32 : régulateur de tension R449
Dans chaque partie, il est demandé de transposer les notions techniques et scientifiques
de la problématique industrielle au niveau de l’enseignement en classes de S.T.I. Electro-
technique ou de S.T.S. Electrotechnique.

140
Partie A : étude de l’alimentation en énergie de l’entreprise
Vu les puissances et les tensions d’alimentation mises en jeu l’entreprise est directement gérée par le
gestionnaire du Réseau de Transport d’Électricité.
La loi du 10 février 2000 organise l’ouverture du marché français de l’électricité et prévoit que le gestion-
naire du réseau de transport soit indépendant des autres activités, distribution et production.
Pour la documentation relative à cette partie se référer aux documents DTA1 à DTA21
A1 Généralités sur l’ouverture du marché de l’énergie électrique
Depuis le 1er juillet 2004, tous les consommateurs professionnels d’électricité sont devenus « éligibles ».
Voir documents DTA1 et DTA2.
Q1. Quel est l’avantage pour un professionnel de devenir « éligibles » ?
Un professionnel éligible est-il obligé d’exercer son éligibilité ? Expliquer.
Q2. Rappeler la chaîne des intervenants entre le producteur et le consommateur d’énergie,
préciser le rôle et la fonction de chacun des intervenants.
Q3. Qui assure la qualité de l’énergie livrée au consommateur ?
Q4. Quels sont les critères que retiennent les fournisseurs pour faire des offres concurrentiel-
les aux clients ?
A2 Étude de l’alimentation HTB de l’entreprise
Q5. Rappeler les niveaux de tensions du réseau HTB et HTA du réseau français.
Q6. Á l’aide des documents DTA3 à DTA5, dessiner un schéma unifilaire de la structure
d’alimentation du poste Rougier de l’entreprise en partant des postes sources La Motte et
Avignon. Les 2 postes sources La Motte et Avignon disposent d’arrivée et de départ en
225 kV et 63 kV.
A3 Étude de l’alimentation HTA de l’entreprise
A3.1 Généralités
Q7. Le réseau HTA de l’entreprise est donné sur les documents DTA9 à DTA12,
Donner la structure de l’alimentation normale secours d’après le document DTA 9.
Définir les boucles qui permettent d’alimenter les différents postes et identifier les
sous stations, à partir des documents DTA10, DTA11 et DTA12.
Q8. Les 4 transformateurs 63 kV/15 kV sont en parallèle, donner les conditions de coupla-
ges de ces transformateurs.
Q9. Les transformateurs de l’installation sont équipés de régleur en charge, expliquer le
principe du régleur en charge.
Á partir de la documentation fournie, documents DTA6 à DTA8, et l’aide de la représen-
tation de votre choix, expliquer le fonctionnement du régleur en charge lorsque l’on
veut augmenter la tension secondaire.
A3.2 Étude du transformateur HTB/HTA N°1
Ce transformateur à une puissance nominale de 12 MVA, une tension primaire de 63 kV et une ten-
sion secondaire de 15 kV à charge nominale, sa tension à vide est de 15,9 kV (pour la prise
moyenne HT), son couplage est Ynd1, sa tension de court circuit garantie est Ucc% = 9%, ses pertes
dues à la charge sont de 78 kW et ses pertes à vide sont de 10 kW. Son refroidissement est du type
ODAF.
Ces transformateurs sont fabriqués à la demande du client. L'essai en court-circuit réalisé par le
constructeur a donné les relevés suivants Ucc = 1 360 V, Icc = 110 A et Pcc = 78 kW.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
1
/
73
100%