Fiche technique Servomoteur rotatif LR24A-MP

Fiche technique Servomoteur rotatif LR24A-MP
www.belimo.com 1
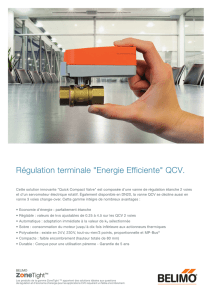
Servomoteur rotatif multifonctions
pour vannes de régulation à boisseaux
sphériques 2 et 3 voies
• Couple de rotation 5 Nm
• Tension nominale AC/DC 24 V
• Commande: proportionnelle
DC 0 ... 10 V ou modifiable
• Signalisation de position:
DC 2 ... 10 V ou modifiable
• Communication par le MP-Bus de
Belimo
• Conversion de signaux de capteurs
Caractéristiques techniques
Valeurs électriques
Tension nominale AC 24 V, 50/60 Hz / DC 24 V
Plage de fonctionnement AC 19,2 ... 28,8 V / DC 21,6 ... 28,8 V
Puissance consommée Marche
Position de repos
Dimensionnement
2 W pour couple nominal
1,2 W
3,5 VA
Raccordement Câble 1 m, 4 x 0,75 mm2
Valeurs fonctionnelles Réglages usine Modifiable Réglage
Couple de rotation (couple nominal) Min. 5 Nm pour tension nominale
Commande Signal de positionnement Y DC 0 ... 10 V, résistance d'entrée 100 kΩ Tout-ou-rien, 3 points (seulement
AC) .................................
Plage de travail DC 2 ... 10 V Point de départ DC 0,5 ... 30 V
Point d'arrivée DC 2,5 ... 32 V .................................
Signalisation de position (tension de mesure U) DC 2 ... 10 V, max. 0,5 mA Point de départ DC 0,5 ... 8 V
Point d'arrivée DC 2,5 ... 10 V .................................
Synchronisme ±5% absolu
Temps de marche 90 s / 90° 35 ... 150 s .................................
Adaptation automatique du temps de marche,
de la plage de travail et du signal de mesure U
à l'angle de rotation mécanique
Déclenchement manuel de l'adaptation par
pression d'une touche ou avec PC-Tool
Adaptation automatique à chaque
mise sous tension ou déclenche-
ment manuel .................................
Limitation de l‘angle de rotation MAX (position maximale) = 100 %
MIN (position minimale) = 0 %
ZS (position intermédiaire) = 50 %
MAX = (MIN + 30° ) ... 100%
MIN = 0% ... (MAX – 30° )
ZS = MIN ... MAX .................................
Niveau de puissance sonore Max. 35 dB (A) Pour un temps 35 s = 45 dB (A)
de marche 90 s = 35 dB (A)
Indication de position Mécanique, embrochable
Sécurité
Classe de protection III Basse tension de protection
Indice de protection IP54 dans toutes les positions de montage
CEM CE selon 89/336/CEE
Fonctionnement Type 1 (selon EN 60730-1)
Tension assignée de choc 0,8 kV (selon EN 60730-1)
Milieu de pollution du dispositif de commande 3 (selon EN 60730-1)
Température ambiante +0 ... +50°C
Température des fluides +5 ... +110°C dans la vanne de régulation à boisseau sphérique
–10°C réchauffeur d‘axe sur demande
Température de stockage –40 ... +80°C
Humidité ambiante 95 % hum. rel., sans condensation (selon EN 60730-1)
Entretien Sans entretien
Dimensions / poids
Dimensions Voir « Dimensions » à la page 5
Poids Env. 500 g

Servomoteur rotatif multifonctions AC/DC 24 V, 5 Nm
LR24A-MP
2www.belimo.com
Consignes de sécurité
!
• Ce servomoteur est conçu pour une application dans des installations de chauffage, de
ventilation et de climatisation stationnaires et ne doit pas être employé pour les
applications étrangères au domaine d‘utilisation spécifié, tout particulièrement pas dans les
avions et autres moyens de transport aérien.
• Le montage doit être effectué par des personnes ayant été formées à cet effet.
Les règlements définis par la loi et les autorités doivent être respectés lors du montage.
• Le commutateur de modification du sens de rotation ne doit être réglé que par des
personnes agréées. Le sens de rotation ne doit pas être modifié, notamment dans les
circuits antigel.
• L'appareil ne doit être ouvert que dans les ateliers du fabricant. Il ne contient aucune pièce
pouvant être remplacée ou réparée par l'utilisateur.
• Le câble ne doit pas être retiré de l'appareil.
• L'appareil contient des composants électriques et électroniques et ne doit pas être mis aux
ordures ménagères. La législation en vigueur dans le pays concerné doit être absolument
respectée.
Caractéristiques du produit
Fonctionnement Mode conventionnel: Le servomoteur est piloté par un signal de positionnement standard de DC
0 ... 10 V et se met dans la position définie par ce signal. La tension de mesure U sert à
l'affichage électrique de la position du clapet entre 0... et 100 % et en tant que signal de
positionnement consécutif pour les autres servomoteurs..
Mode sur MP-Bus: Le servomoteur reçoit son signal de positionnement numérique du régulateur
hiérarchiquement supérieur par l‘intermédiaire du MP-Bus et se règle à la position prédéfinie.
La connexion U fait office d‘interface de communication et n‘apporte pas de tension de mesure
analogique.
Convertisseur pour capteurs Possibilité de connexion d’un capteur (capteur passif ou actif ou contact de commutation). Le
servomoteur MP sert de convertisseur analogique/numérique pour la transmission du signal du
capteur via le MP-Bus au système supérieur.
Servomoteurs paramétrables Les réglages usine sont valables pour les applications les plus fréquentes. Selon les besoins
liés à l‘application ou à l‘entretien, certains paramètres peuvent être modifiés avec un appareil
de paramétrage MFT (par ex. PC-Tool MFT-P).
Montage direct simple Montage direct aisé sur la vanne à boisseau sphérique au moyen d‘une seule vis.
La position de montage par rapport à la vanne peut être choisie selon des paliers de 90° .
Actionnement manuel Fonctionnement manuel possible par bouton-poussoir - temporaire-permanent
Débrayage du réducteur et découplage du servomoteur tant que le bouton est pressé /
enclenché.
Angle de rotation réglable Angle de rotation réglable avec butées mécaniques.
Sécurité de fonctionnement élevée Le servomoteur est protégé contre les surcharges, ne requiert pas de contact de fin de course
et s‘arrête automatiquement en butée.
Positionnement de base Le servomoteur se met en position initiale lors de la première mise sous tension, c‘est-à-dire
lors de la première mise en service ou une fois que le bouton « Débrayage du réducteur » a été
actionné.
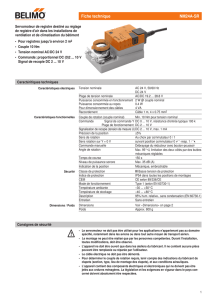
Réglage standard : sens de rotation Y2 (dans le sens contraire des aiguilles d’une montre)
Servomoteur rotatif Vannes à mouvement rotatif
Y2
A – AB = 0%
Y1
A – AB = 100%
Après cette opération, le servomoteur se déplace jusqu‘à la position définie par le signal de
positionnement.
Accessoires
Description Fiche technique
Accessoires électriques Contact auxiliaire S..A.. T2 - S..A..
Potentiomètre d'asservissement P..A.. T2 - P..A..
Appareil de paramétrage manuel MFT-H T2 - MFT-H
PC-Tool MFT-P T2 - MFT-P
Positionneur SG..24 T2 - SG..24
Afficheur numérique de position ZAD24 T2 - ZAD24

Servomoteur rotatif multifonctions AC/DC 24 V, 5 Nm LR24A-MP
www.belimo.com 3
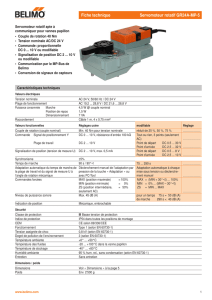
Installation électrique
Schéma des connexions Mode conventionnel
Y
U
132 5
– +
T
~
Mode sur MP-Bus
Y
U
132 5
– +
T
~
Capteur
MP
Sens de
rotation
Y2
Y1
Remarques
• Connexion via transformateur de sécurité.
• Raccordement parallèle d'autres servomoteurs
possible
• Le commutateur de sens de rotation est couvert.
Réglage standard : sens de rotation Y2
!
Signal de positionnement
Tension de mesure
Fonctions en mode sur MP-Bus
Connexion au MP-Bus Alimentation et communication
par le même câble à 3 fils
• pas besoin de blindage ni de torsade
• pas besoin de résistances de terminaison
Topologie des câbles
Il n‘y a aucune restriction concernant la topologie des câbles
(des montages en étoile, circulaires, en faisceau ou combinés
sont autorisés).
1 2 3 5
MP
+
~
–
T
U
Y
Connexion de capteurs actifs Connexion d‘un contact de commutation externe
1 2 3 5
MP
+
~
–
T
U
Y
• Alimentation AC/DC 24 V
• Signal de sortie DC 0 ... 10 V
(max. DC 0 ... 32 V)
• Résolution de 30 mV
1 2 3 5
MP
p
+
~
–
T
U
Y
• Courant de commutation 16 mA pour
24 V
• Le point de départ de la plage de travail
doit être paramétré à une valeur ≥ 0,6 V
sur le servomoteur MP.
Connexion de capteurs passifs
1 2 3 5
MP
+
~
–
T
U
Y
Servomoteurs et capteurs
complémentaires (8 au max.)
Servomoteurs et capteurs
complémentaires (8 au max.)
Servomoteurs et capteurs
complémentaires (8 au max.)
Capteur Plage de température Plage de résistance Résolution
Ni1000 –28 ... +98°C 850 ... 1600
Ω
1
Ω
PT1000 –35 ... +155°C 850 ... 1600
Ω
1
Ω
NTC –10 ... +160°C
(selon le type)
200
Ω
... 60 k
Ω
1
Ω
Servomoteurs et capteurs
complémentaires (8 au max.)

Servomoteur rotatif multifonctions AC/DC 24 V, 5 Nm
LR24A-MP
4www.belimo.com
Fonctions avec valeurs fondamentales (seulement en mode conventionnel)
Commande forcée avec AC 24 V
avec contacts de relais
Commande forcée avec AC 24 V
avec commutateur rotatif
a
1235
b
U
Y
c
~T
Fonctions a b c
0 %
ZS 50 %
(position
intermédiaire)
100 %
Mode de régulation
selon Y
1235
124
3
U
Y
~T
Pos Fonctions
1 0 %
2ZS 50 %
(position intermédiaire)
3 100 %
4Mode de régulation
selon Y
Commande à distance 0... 100 % Limitation minimale
1235
U
Y
SGA24
SGF24
SGE24
4
YZ
2
13
T
~
~T
1235
U
Y
SGA24
SGF24
SGE24
4
YZ
2
13
T
~
~T
100
0
Y [V]
10
min
0 [%]
Régulation asservie (en fonction de la position) Commande avec 4 ... 20 mA via résistance externe
+
~
12351235
U DC 2...10 V
U DC 2...10 V
U
YU
Y
–
T
1235
U DC 2 ... 10 V
U
Y
(
+
)
(–) 4 ... 20 mA
+
~
–
T
Indication de position Contrôle fonctionnel
1235
ZAD24
4
2
13
~T
+
–
U
Y
1235
~T
U
Y
Procédure
• Appliquer AC 24 V aux connexions 1 et 2
• Desserrer connexion 3 :
– si sens de rotation à 0 :
servomoteur tourne
– si sens de rotation à 1 :
servomoteur tourne
• Court-circuiter connexions 2 et 3 :
– servomoteur tourne en sens inverse
vers servom. suivant
Y (DC 0 ... 10 V)
du régulateur
Y (DC 0 ... 10 V)
du régulateur
par ex. 1N 4007
par ex. 1N 4007
Servomoteur maître
Positionneur Positionneur
500 Ω
Y (DC 0 ... 10 V)
du régulateur
Servomoteur esclave La résistance de 500 Ω convertit le
signal de courant de 4 ... 20 mA en
un signal de tension de DC 2 ... 10 V
Adaptation sens de rotation

Servomoteur rotatif multifonctions AC/DC 24 V, 5 Nm LR24A-MP
www.belimo.com 5
Dimensions [mm]
Schémas dimensionnels
25 124
84
157
71
R65
25 124
84
157
71
R65
Fonctions pour servomoteurs à paramétrage spécifique
Commande forcée et limitation avec AC 24 V
(avec contacts de relais)
Commande forcée et limitation avec AC 24 V
(avec commutateur rotatif)
T
~
a b c d
U
T
~
Y
e
51 2 3
Fonctions a b c d e
FERMÉ 1)
MIN
ZS
(position intermédiaire)
MAX
OUVERT
Mode de régulation
selon Y
T
~
51 2 3
U
T
~
Y
1) Attention ! La fonction n'est garantie que si le point de départ de la plage de travail est défini à au moins 0,6 V.
Commande 3 points Commande tout-ou-rien
U
T
~
U
T
~
Y
ab
51 2 3
Commutateur
sens de
rotation
a b 0 1
stop stop
U
T
~
+
U
T
~
Y
51 23
–
+
–
Y (DC 0 ... 10 V)
du régulateur
par ex. 1N 4007
Y (DC 0 ... 10 V)
du régulateur
par ex. 1N 4007
par ex. 1N 4007
1
0
FERMÉ 1)
MIN
ZS
MAX
OUVERT
 6
7
8
9
6
7
8
9
1
/
9
100%