Actions de contact entre solides Liaisons

CHAPITRE 13
Actions de contact entre solides
Liaisons
13.1 LOIS DU CONTACT ENTRE SOLIDES
13.1.1 Introduction
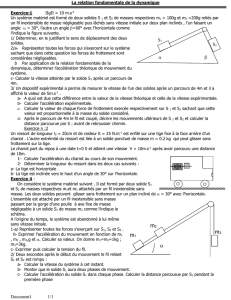
Pour déplacer sur le sol un solide (armoire, caisse (figure 13.1), etc.) il est
nécessaire d'exercer une action mécanique suffisante pour vaincre l'action exercée
par le sol sur le solide, action qui s'oppose à tout mouvement du solide sur le sol.
Les actions de contact entre solides sont de caractère inter-moléculaire et ne se
manifestent qu'à cette échelle. Elles ne s'exercent donc qu'à des distances
extrêmement faibles, d'où leur nom d'actions de contact. De ce fait, les actions de
contact sont très sensibles à l'état des surfaces en contact. Par ailleurs, les actions
de contact dépendent des autres actions mécaniques exercées. Par exemple, il est
plus difficile de tirer la caisse remplie que la caisse vide. Les phénomènes de
contact sont complexes, et les lois du contact que nous énoncerons ne sont
qu'approchées. Elles constituent toutefois une approche satisfaisante dans de
nombreux problèmes mettant en jeu des actions de contact entre solides.
FIGURE 13.1. Déplacement d'une caisse.

13.1 Lois de contact entre solides 187
13.1.2 Contact ponctuel
13.1.2.1 Lois du contact ponctuel
Soit deux solides (S) et (T), en contact au point P à un instant donné (figure
13.2). En fait le contact se fait suivant des surfaces de dimensions très faibles et
peut être assimilé à un contact ponctuel. Les deux solides étant supposés
indéformables et impénétrables, ils sont tangents en P. Nous sommes dans le
schéma cinématique étudié au chapitre 10 (paragraphe 10.1.1).
Du fait du contact des deux solides en P, le solide (T) exerce sur le solide (S)
une action de contact représentée par le torseur
{}
TS→
C
. Les lois du contact
ponctuel sont les suivantes :
1ère loi
L'action de contact exercée par le solide (T) sur le solide (S) est une force dont
la ligne d'action passe par le point de contact P.
Le torseur
{}
TS→
C
est donc un glisseur d'axe passant par le point de contact
P. En particulier :
{}
0
PTS
=
→
J
JG
G
C
M. (13.1)
L'étude expérimentale des phénomènes de contact montre que la résultante de
l'action de contact exercée par le solide (T) , n'est pas, comme les actions à
distance, connue ou calculable à priori, mais dépend des autres actions
mécaniques exercées sur (S). L'action de contact doit toutefois vérifier certaines
conditions exprimées dans des lois que nous énonçons ci-après.
FIGURE 13.2. Solides en contact ponctuel.
(S)
(T)
P

188 Chapitre 13 Actions de contact entre solides. Liaisons
La force de contact exercée par le solide (T) sur le solide (S) est décomposée
en deux forces :
— une force de résultante t
R
J
G
, appelée force de résistance au glissement ou
force de frottement, dont la ligne d'action est contenue dans le plan tangent en P
aux deux solides ;
— une force de résultante n
R
JG
appelée force de contact normale, dont la ligne
d'action est la droite normale en P au plan tangent.
La résultante de l'action de contact s'écrit ainsi :
{}
tn
R
RR
TS
=
+
→
J
GJGJG
C
. (13.2)
2ème loi
Si le vecteur n
G
est le vecteur directeur unitaire de la normale en P orientée du
solide (T) vers le solide (S), dans tous les cas où (S) et (T) ne sont pas collés au
point P, on a :
, avec 0,
nnn
RRn R
=
≥
JG
G
(13.3)
où Rn est la composante de la force de contact normale. Cette loi exprime le fait
que la force de contact normale s'oppose à la pénétration du solide (S) dans le
solide (T). La représentation symbolique de la force de contact est reportée sur la
figure 13.3.
3ème loi ou loi de Coulomb
Il existe un coefficient f positif appelé coefficient de frottement réciproque de
(S) sur (T), dépendant des matériaux dont sont constitués (S) et (T), dépendant de
l'état des surfaces en contact, mais indépendant des mouvements ou de l'équilibre
de (S) et de (T), tel que soit vérifiée à chaque instant la condition :
tn
R
fR≤
J
G
. (13.4)
FIGURE 13.3. Composantes normale et tangentielle de la force de contact.
(T)
(S)
P
R
JG
t
R
JG
n
R
J
G
n
G
plan tangent

13.1 Lois de contact entre solides 189
Cette loi doit être précisée de la manière qui suit :
— Si le solide (S) glisse sur (T), donc si sa vitesse de glissement n'est pas nulle
() ()
{
}
(, ) 0
TT
P
gS S
Pt
=
≠
J
JG
G
G
V
Mv, (13.5)
• d'une part, c'est l'égalité qui est vérifiée :
tn
R
fR=
J
G
, (13.6)
• d'autre part, t
R
J
G
et
()
(, )
T
gS Pt
G
v sont colinéaires et de signes opposés :
() ()
(, ) 0, (, ) 0.
TT
tt
gS gS
RPt RPt∧= <⋅
JG JG
G
GG
vv (13.7)
— Si le solide (S) ne glisse pas sur (T), donc si sa vitesse de glissement est
nulle :
() ()
{
}
(, ) 0
TT
P
gS S
Pt
=
=
J
JG
G
G
V
Mv, (13.8)
c'est l'inégalité qui est vérifiée :
tn
R
fR<
J
G
. (13.9)
Ce qui précède peut également se traduire en disant que, tant que l'inégalité
(13.9) est vérifiée, le solide (S) ne peut pas glisser sur le solide (T). Le glissement
ne se produit que lorsque les autres actions exercées sur le solide (S) sont assez
grandes pour que soit vérifiée la relation (13.6). Le solide (S) glisse alors sur (T),
la force de frottement étant opposée au vecteur vitesse de glissement au point P.
En outre, pour une valeur donnée de Rn, l'égalité (13.6) est d'autant plus
facilement réalisée que f sera petit. Ce résultat s'exprime en disant que "plus le
coefficient de frottement est faible, plus le glissement est aisé". Des ordres de
grandeurs peuvent être données pour le coefficient de frottement suivant la nature
des solides en contact :
bois sur bois : 0,3 à 0,5 ;
acier sur bois : 0,25 ;
bronze sur bronze : 0,2 ;
acier sur acier : 0,15 ;
garniture de frein sur tambour d'acier : 0,4 ;
pneu sur chaussée : 0,2 à 0,6.
13.1.2.2 Corrections à la loi de Coulomb
Les lois de frottement solide ne sont applicables qu'au cas du frottement sec
(non lubrifié) entre deux solides. La loi de Coulomb fournit généralement une
approche qualitative satisfaisant aux phénomènes de frottement sec. Si les
résultats quantitatifs qu'on en tire ne sont pas toujours en accord avec les valeurs
mesurées, cela résulte du fait que le coefficient de frottement est très sensible à
l'état de surface des matériaux en contact, à des traces d'humidité ou de
lubrifiants, etc., et cela variant d'une région à l'autre des solides en contact. En

190 Chapitre 13 Actions de contact entre solides. Liaisons
outre le coefficient de frottement dépend de la température des parties en contact,
or le frottement les échauffe, d'où une diminution du coefficient de frottement.
L'importance de cet effet est mis en évidence dans le comportement du freinage
d'une automobile. Le coefficient f dépend également dans une certaine mesure de
la composante normale Rn. Enfin, le coefficient de frottement dépend de la vitesse
de glissement.
Une manière assez simple de tenir compte de la dépendance du coefficient de
frottement vis à vis de la vitesse consiste à prendre deux valeurs différentes pour
les deux éventualités de la loi de Coulomb : un coefficient de frottement au repos
fr et un coefficient de frottement de glissement fg, de valeur inférieure à celle du
coefficient au repos. Cette distinction entre les deux conditions de frottement
permet alors de rendre compte d'effets usuels. Par exemple, un solide se trouve en
équilibre sur un plan incliné. Dans le cas d'un équilibre précaire, une très faible
impulsion suffit pour rompre l'équilibre, le corps ayant ensuite un mouvement de
glissement accéléré. Si le plan est horizontal, un effort plus élevé est nécessaire
pour faire bouger le solide que celui nécessaire pour le déplacer ensuite.
13.1.2.3 Puissance développée
La puissance développée dans le repère (T) par l'action exercée sur le solide
(S), en contact ponctuel en P avec (T) est, d'après (11.13) :
()
{}{}
()
{}
TT
S
PTS TS
=
→→
⋅
CC
V
. (13.10)
Soit, exprimée au point de contact P :
()
{}{}
()
(, )
TT
gS
PR Pt
TS TS
=
→→
⋅
J
G
G
CC
v, (13.11)
ou encore puisque
(
)
(, )
T
gS Pt
G
v est orthogonal à n
R
J
G
:
()
{}
()
(, )
TT
tgS
PRPt
TS
=
→⋅
J
G
G
C
v. (13.12)
La puissance développée par la force de contact normale est nulle. La puissance
se réduit à celle développée par la force de frottement. D'après la loi de Coulomb
cette puissance est négative ou nulle.
13.1.2.4 Contact sans frottement
Si le frottement est nécessaire dans certains cas (marche sur le sol,
entraînement d'une automobile, etc.), dans d'autres cas il est nécessaire de le
diminuer le plus possible afin de diminuer l'énergie dissipée par frottement et
d'éviter une usure prématurée des pièces en contact.
Dans le cas extrême où le coefficient de frottement est nul, on dit que le contact
a lieu sans frottement ou que le contact est parfait au point de contact considéré.
 6
7
8
9
10
11
12
13
14
15
16
17
18
6
7
8
9
10
11
12
13
14
15
16
17
18
1
/
18
100%