Modèle biomécanique pour les muscles et les tendons de l`index

Modèle biomécanique pour les muscles
et les tendons de l'index humain
Rafic Younès, Sahar Fayyad
Université Libanaise, Faculté de Génie,
Equipe de recherche 3M
Beyrouth, Liban
ryounes@ul.edu.lb
Fethi Ben Ouezdou
Université de Versailles Saint Quentin en Yvelines,
Laboratoire LIRIS,
Versailles, France;
ouezdou@liris.uvsq.fr
Abstract — This paper treats the development of biomechanical
model for human index. In our system, the adopted model permits
the tensions estimation for the seven muscles and tendons. This
model can be offer a best biomechanical and neuromuscular
behavior comprehension to our system. So, we will have a
simulation tool for the chirurgical reparation acts in the handicap
domain. This work permits to:
- calculate the joints torques,
- correlate between the muscular forces and the joints torques,
- estimate the resultant forces using a nonlinear static optimization
method.
Simple gestures such as the grasp are also simulated.
Résumé — Ce papier traite le développement d'un modèle
biomécanique pour l'index humain. Le modèle adopté permet
l'estimation des tensions dans les sept muscles et tendons du
système étudié. Grâce à ce modèle, une meilleure compréhension
du comportement biomécanique et neuromusculaire du système est
visée. Cela permettra, dans le cadre de l'handicap, de disposer à
terme d’un outil pour la simulation des actes de chirurgie
réparatrice (transfert de tendon). Le papier permet de :
- calculer les couples articulaires,
- relier les forces musculaires aux couples articulaires.
- estimer les forces résultantes, responsables d'un mouvement
dynamique de l'index en employant une méthode d'optimisation
statique non linéaire.
Des gestes simples tel que le pincement sont simulés.
I. INTRODUCTION
Le but de notre étude est de reproduire, grâce à un
ordinateur, des mouvements naturels et des gestes précis de
l’index humain. Cependant, le mouvement de l’index est
actionné avec les corps musculaires par l’intermédiaire des
tendons (le tendon est l'élément intermédiaire agissant comme
courroie de transmission entre le corps musculaire et l'os).
Donc, pour reproduire un certain geste, on doit maîtriser les
relations reliant les efforts musculaires au mouvement des os.
Notre problème peut se décomposer en trois parties :
- Calculer les couples articulaires,
- Relier les forces musculaires aux couples articulaires.
Estimer les forces résultantes, responsables d'un
mouvement dynamique de l'index.
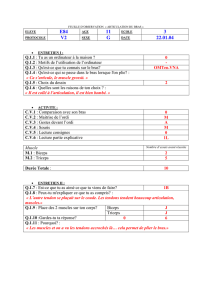
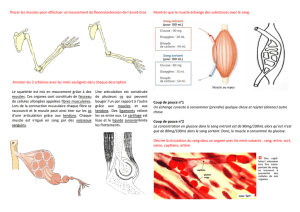
II. OS ET ARTICULATIONS DE L’INDEX
L’index est constitué d’un os métacarpien MC et de trois
Phalanges [5] : la première phalange P1 (phalanx proximalis),
la deuxième phalange P2 (phalanx média) et la troisième
phalange P3 (phalanx distalis). Ces quatre os sont mobilisés
autour de trois articulations (figure 1) : L’articulation
métacarpophalengienne (MCP) lie l’os métacarpien à la
première phalange grâce à une articulation «condylienne
asymétrique», l’articulation interphalengienne proximale (PIP)
et l’articulation interphalengienne distale (DIP) lient la
première, la deuxième et la troisième phalange.
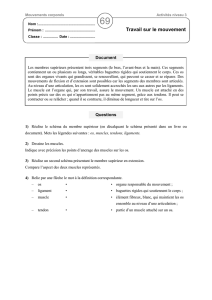
L’index possède sept muscles, trois muscles intrinsèques et
quatre muscles extrinsèques, qui activent les trois articulations
a quatre degrés de liberté.
1-First Dorsal Interosseous ou FDI : ce muscle fléchit
l’articulation MCP de l’index et contribue aussi à son
abduction.
2- First Palmar Interosseous ou FPI : c’est un muscle
intrinsèque dont le point d’insertion proximale se situe sur le
métacarpe de l’index. Son point d’insertion distale se situe sur
la base ulnaire de la phalange proximale (Figure 1). Sa fonction
primaire est de fléchir l’articulation MCP de l’index. Il joue
aussi un rôle dans l’adduction de cette articulation, ainsi que
dans l’extension des articulations interphalangiennes distale et
proximale (IPD te IPP).
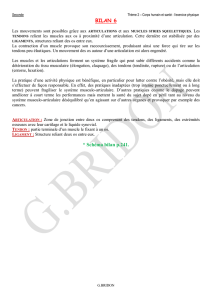
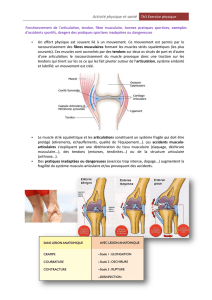
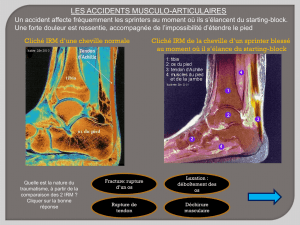
3- Extensor Digitorum Commun ou EDC : c’est un muscle
extrinsèque dont le point d’insertion proximale se situe sur la
surface latérale de l’humérus. Sa première insertion est située
au niveau du poignet. Il se décompose ensuite en quatre
tendons pour s’insérer sur les phalanges des quatre doigts longs
(Figure 2). Pour l’index, son point d’insertion distale se situe
sur la base de la phalange secondaire. Il appartient au
mécanisme d’extension de l’index. Sa fonction est d’étendre
les articulations MCP, IPP et IPD.
4- Flexor Digitorum Profundus ou FDP : c’est un muscle
extrinsèque dont le point d’insertion proximale se situe sur la
surface antérieure et radiale de l’ulna. Son premier point
d’insertion distale se situe au niveau du poignet. Il se
décompose ensuite en quatre tendons pour s’insérer sur les
phalanges des quatre doigts longs (Figure 2). Pour l’index son
point d’insertion distale se situe sur la base de la phalange

distale. Sa fonction consiste à fléchir les articulations MCP,
IPP et IPD.
Figure1. Muscles intrinsèques des doigts longs
5- Lumbrical de l’index ou IL : c’est un muscle intrinsèque
dont le point d’insertion proximale se situe sur la surface
radiale du tendon du FDP de l’index.
Une des propriétés spécifiques aux lumbricaux est relative
au fait qu’ils s’insèrent sur les tendons des autres muscles et
non pas sur des os (Figure 1). Le point d’insertion distale de
l’IL se situe sur le mécanisme d’extension de l’index ainsi que
sur la partie dorsale du tendon de l’interosseux. Sa fonction est
de fléchir l’articulation MCP et d’étendre les articulations IPP
et IPD de l’index.
6- Flexor Digitorum Superficialis ou FDS : c’est un muscle
extrinsèque dont le point d’insertion proximale se situe sur la
base de l’ulna et sur la base du radius. Comme pour le muscle
FDP, le tendon de ce muscle se décompose en quatre tendons
qui viennent s’insérer sur les phalanges des quatre doits longs
(Figure 2). Pour l’index son point d’insertion distale se situe
sur la base de la phalange proximale. Sa fonction consiste à
fléchir les articulations MCP et IPP.
Figure 2. Muscles extrinsèques des doigts longs
7- Extensor Indicis ou EI : c’est un muscle extrinsèque dont
le point d’insertion proximale se situe au milieu de l’ulna. Son
point d’insertion distale se situe sur la base de la phalange
intermédiaire et il appartient au mécanisme d’extension de
l’index (figure 2). Ce muscle se situe en dessous de l’Extensor
Carpi Ulnaris. Sa fonction est d’étendre les articulations MCP,
IPP et IPD. C’est un extenseur propre à l’index. En fait, parmi
les doigts longs, seulement l’index et l’auriculaire possèdent un
extenseur propre à chacun.
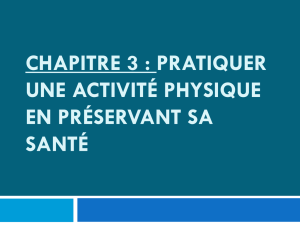
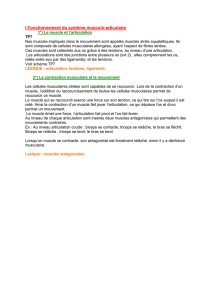
Pour faciliter le travail, on peut schématiser tous les
muscles de l’index par la figure 3 ci-dessous :
Figure 3: Muscles de l’index.
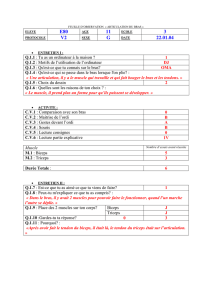
III. MODELISATION DE L’EFFORT MUSCULAIRE
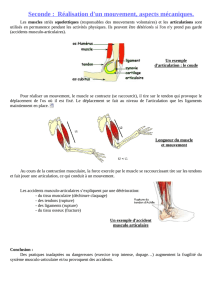
Le modèle du tendon représenté ci-dessous (figure 4), a été
établi par Martin Lamontagne de l’université de Montréal
(Lamontagne, 1900), et ceci pour étudier les propriétés
mécaniques et le comportement viscoélastique tendineux.
Figure 4 : Modèle du tendon
Comme ce papier est limité au travail statique et n’étudie pas
la dynamique, donc la force dans le tendon FT est considérée
comme une force élastique pure de raideur KT, et elle est
calculée en utilisant la formule ci-dessous :
()
TOTTT LLKF −
=
Avec LT0 est la longueur du tendon au repos [An et al]

Tendon Longueur au repos (mm)
FDP 29.4
FDS 27.5
EDC 32.2
EI 21.7
LUM 7
FDI 5
FPI 4
Tableau 1 Longueur des tendons au repos
La représentation mécanique du modèle macroscopique du
muscle (Figure 5), a été initialement établie par [7]. Le modèle
utilisé est composé d’un ressort linéaire représentant le tendon
en pennation associé à un modèle de Hill pour le muscle. La
différence entre le modèle de Zajac et celui de Hill est l’angle
de pennation (Figure 5).
Figure 5. Modèle musculotendineux de Zajac [7]
En se basant sur une étude géométrique du système, la relation
entre la force tendineuse et la force musculaire peut s’écrire :
(
)
α
cos
mT FF =
Avec FT étant la force tendineuse, Fm la force musculaire et α
est l’angle de pennation qui existe entre les fibres musculaires
et le tendon. L’angle de pennation change en fonction de la
longueur des fibres musculaires, [8]. Il est donné par la
formule suivante :
⎟
⎠
⎞
⎜
⎝
⎛⋅= )(
arcsin)( 0
0tL
Lt
α
α
Avec L(t) la longueur des fibres musculaires à l’instant t, α0
est l’angle de pennation à la longueur optimale l0 des fibres
musculaires. La longueur optimale est la longueur du muscle
au repos. Le muscle développe une force maximale à cette
longueur et pour une activation égale à l’unité. La valeur de la
longueur optimale de chaque muscle est donnée dans le
tableau suivant, [3]; La force musculaire est fonction de trois
variables, l’activation, la déformation et la vitesse de
contraction. Les formules représentatives de l’effort
musculaire utilisées dans cette étude sont celles développées
par Hill [2]. Elles prennent en compte les raideurs des ressorts
et les différentes propriétés physiologiques du muscle.
La forme générale de l’équation représentant la force
musculaire en fonction des variables physiologiques est :
(
)
[
]
)()()(
max
ε
ε
fpvfcftaFFm+⋅
⋅
=
Où Fm est la force musculaire, Fmax est la force maximale
qu’un muscle peut exercer, a(t) est l’activation musculaire, f(ε)
et fp(ε) sont des fonctions reliant la force à la déformation des
fibres musculaires, fc(v) est une fonction reliant la force a la
vitesse de contraction v du muscle.
Muscles L0 cm Muscles L0 cm
FPL 5.9 SPI 1.7
EPL 5.7 FDSR 7.3
APB 3.7 FDPR 6.8
AP 3.6 RL 6
EPB 4.3 TPI 1.5
FPB 3.6 FDMi 1.5
APL 4.6 ADMi 1.5
OP 2.4 FDSS 7
FDI 2.5 EDMI 5.5
IO1 2.5 FDPS 6.2
FPI 1.5 FCR 5.2
FDSI 7.2 FCU 4.2
FDPI 6.6 ECRL 9.3
IL 5.5 ECRB 6.1
EI 5.5 ECU 4.5
EDC 5.7 PQ 3
SDI 1.4 PT 5.1
TDI 1.5 SUP 2.7
FDSM 7 BBI 14.2
FDPM 6.6 BRA 10.2
ML 6.6 BRR 27
FoDI 1.5 AC 1.7
TBI 12.1
Tableau 2. Longueur optimale des fibres musculaires
IV. CALCUL DU COUPLE ARTICULAIRE
L’équation d’équilibre entre les couples articulaires et les
efforts tendineux s’écrit sous la forme suivante [6]:
[
]
[
]
[]
τ
α
=+
⋅
⋅
Tm FFTlt cos
Avec Fm étant la force musculaire, Ft la force tendineuse et α
est l’angle de pennation.
L’intégration de l’angle de pennation complique le calcul.
Cependant une étude réalisée par Scott [4], montre qu’il vaut
mieux négliger l’angle de pennation au lieu de le prendre
constant. En effet, dans ce dernier cas, l’erreur engendrée est
trop importante. Cette étude ne prendra pas en compte l’angle
de pennation.
Le modèle inverse consiste à déduire les efforts tendineux à
partir des couples articulaires donnés. Etant donné un
mouvement prédéfini, le modèle dynamique implémenté dans
le simulateur SHARMES donne comme résultats les couples
articulaires nécessaires pour la réalisation d’un tel
mouvement. Les tensions dans les tendons, devant accomplir
ce mouvement, seront calculées par le modèle inverse.

Etant donné la nature redondante du problème (le nombre de
muscles dans le système est largement supérieur au nombre de
degrés de liberté), le problème possède une infinité de
solutions. Le modèle inverse sera résolu alors par une
technique d’optimisation afin de trouver une solution optimale
au problème.
En général, la technique d’optimisation consiste à calculer les
efforts tendineux qui produisent le mouvement désiré, tout en
minimisant une fonction coût judicieusement choisie.
La méthode de calcul débute en isolant les os les plus
éloignés, les phalanges distales. Ensuite on procède en suivant
la convention suivante : « chaque tendon qui s’insère sur un os
affectera toutes les articulations en amont de son insertion ».
Pour illustrer la technique permettant de calculer les éléments
de cette matrice, un exemple est détaillé dans ce qui suit. Pour
ce faire, le système sur la figure 6 (l’index) est considéré.
Figure 6 : Modélisation de l’index
Ce système est composé de trois articulations de centres de
rotation respectifs O1, O2 et O3. On a trois insertions de trois
forces extérieures, la première insertion est au milieu de la
phalange distale, la deuxième est au milieu de la phalange
secondaire et la troisième est au milieu de la phalange
proximale. On débute le calcul en isolant tout d’abord la
phalange distale. On obtient donc un moment M1 au centre de
l’articulation O1, calculé par la relation suivante :
11 11 FIOM ∧=
Où le symbole ^ représente le produit vectoriel. 11IO est le
vecteur du point d’insertion de la force extérieure 1
F
au
centre de rotation de l’articulation.
La deuxième étape est de calculer le moment 2
M au centre de
l’articulation O2, donné par : 1222 1
22 FIOFIOM ∧+∧=
On isole la phalange distale et la phalange secondaire. 22 IO
est le vecteur du point d’insertion de la force extérieure 2
F
au
centre de rotation de l’articulation O2, 12 IO est le vecteur du
point d’insertion de la force 1
F
au centre de l’articulation O2.
La troisième étape est de calculer le moment M3 au centre de
l’articulation O3, donné par:
12333 13
2
33 FIOFIOFIOM ∧+∧+∧=
Dans cette étape on isole les trios phalanges: distale,
secondaire et proximale. 33 IO est le vecteur du point
d’insertion de la force extérieure 3Fau centre de rotation de
l’articulation O3, 23 IO est le vecteur du point d’insertion de la
force extérieure 2
F
au centre de rotation de l’articulation O2,
13 IO est le vecteur du point d’insertion de la force extérieure
1
Fau centre de rotation de l’articulation O3.
V. PROBLEME A RESOUDRE
Nous proposons pour notre problème de choisir comme critère
d’optimisation la somme des efforts musculaires, [10] :
F= ∑
=
7
1
)(
i
p
Fi , p>0
On choisit donc la fonction coût à optimiser comme étant la
somme du carré de l’effort musculaire, elle est représentée par
la formule suivante :
F= ∑
=
7
1
2
)(
i
Fi
Et comme ce travail est fait sur l’index donc on a 7 muscles,
alors le problème est réduit à trouver la solution du système ci-
dessous en cherchant à résoudre :
Min de F= ∑
=
7
1
2
)(
i
Fi
Sous les trois contraintes suivantes:
1-[Tlt].[Fm+ k.X] = [τ] avec [Tlt] est une matrice qui dépend
de l’anatomie du système et de la configuration instantanée de
la main et donc du vecteur des positions articulaires q(t). Les
termes de la matrice [Tlt] sont homogènes à des distances
représentant les bras de levier entre le point d’insertion de la
force tendineuse et le centre de rotation de l’articulation
concernée. Pour le cas étudié cette matrice est de dimension
(4x7).
Fm+K.X est un vecteur de longueur 7, il représente la somme
de la force musculaire et de la force tendineuse.
2-Fmi > [0 0 0 0 0 0 0 ], les sept forces musculaires sont
positives.
3-Xi > [0.1 0.1 0.1 0.1 0.1 0 0.1 0], Xi représente
l’allongement de chacun des sept tendons de la main.
VI. RESULTATS ET DISCUSSION
Dans cette partie on a traité quatre cas de configurations, cela
signifie qu’on a changé les trois angles articulaires quatre fois.
Les angles articulaires de l’index sont les suivants : θDIP
(Articulation Interphalangienne distale), θPIP (Articulation
Interphalangienne Proximale), θMP (Articulation
Métacarpophalangienne). On a passé de la configuration
verticale vers la configuration où l’index est plié le maximum

pour pouvoir prendre une idée sur les allongements minimaux
et maximaux des tendons de l’index.
A. Premier cas de configuration :
En se basant sur l’étude faite par K. N. An, E. Y. Chao, W. P.
Cooney, et R. L. Linscheid [1] sur les forces de la main durant
différentes fonctions, les valeurs des charges extérieures ainsi
que les angles des différentes articulations sont choisis, pour
ce premier cas. On a: F1=109N, F2=38N, F3=73N, θDIP =23°,
θPIP =48°, θMP =62°.
Les couples articulaires seront calculés en utilisant la
méthodologie du paragraphe 4. Tout calcul fait on est arrivé au
résultat suivant : τ = [0 946.6 488.8 130.6] N.cm
En optimisant par Matlab, on a pu dessiner les déformations
des tendons de l’index en fonction de leurs raideurs ainsi que
la force tendineuse et musculaire de FDP en fonction de la
raideur encore. Les graphes des résultats obtenus pour ce cas
de configuration sont les suivants :
On constate que EI (extensor indicis) a la plus grande
élongation. Elle est de 2.3mm lorsque la raideur est de
200N/cm. La force tendineuse augmente avec l’augmentation
de la raideur tandis que la force musculaire diminue de la
même valeur.
B. deuxième cas de configuration ;
Dans ce cas on aura les valeurs suivantes des angles
articulaires :
θDIP =30°, θPIP =60°, θMP =62°.
On garde les mêmes valeurs des charges extérieures. Tout
calcul fait, on obtient comme couple articulaire pour ce
nouveau cas de configuration :
τ = [0 793.8 514.517 136] N.cm
L’allongement de l’estensor indicis est arrivé jusqu’à 7 mm
tandis que celui de l’extensor digitorium common est arrivé
jusqu’à 4 mm.
Le graphe représentant les deux forces musculaires et
tendineuses en fonction de la raideur du flexor digits
profondus est ci-dessus.
C. Troisième cas de configuration :
L’index est dans la position verticale ce qui conduit aux
valeurs suivantes pour les angles articulaires : θDIP =0°,
θPIP =0°, θMP =0°
Le vecteur couple articulaire aura comme valeur : τ = [0 915
456.25 136.25] N.cm et ceci pour les mêmes valeurs de charge
extérieure que les deux cas précédents. La déformation des
tendons de l’index en fonction de sa raideur est donnée dans le
graphe ci-dessous :
 6
7
6
7
1
/
7
100%