Mise en œuvre d`une application à base de Microcontrôleurs
publicité

REPUBLIQUE TUNISIENNE
MINISTERE DE L’EDUCATION
Génie Électrique
Manuel de cours
3ème année de l’enseignement secondaire
Sciences Techniques
Les auteurs
Fredj JAZI
: Inspecteur Général de l’Education
Mahmoud MANNAÏ
: Inspecteur principal
Mohamed LABIDI
: Inspecteur
Sadok MAYEL
: Inspecteur
Mohamed Sghaïer KHALFAOUI : Professeur Principal hors classe
Les évaluateurs
Mohamed BEN HAMIDA
: Inspecteur général de l’Education
Chedly CHAMMAKH
: Inspecteur Principal
Hamadi ZNAYDI
: Professeur Universitaire
Centre National Pédagogique
© Tous droits réservées au Centre National Pédagogique
PREFACE
L’ouvrage de génie électrique s'adresse aux élèves de 3ème année de la section
Sciences Techniques. Il comporte deux manuels : l'un est intitulé manuel de cours,
l'autre manuel d'activités. Ces deux manuels sont destinés à être utilisés
simultanément par les élèves, en conformité avec la stratégie d'enseignement
adoptée pour la discipline.
Les thèmes traités permettent de développer, chez les élèves, les aptitudes à
s'informer et à participer à la construction de leur savoir et savoir-faire.
L'élève demeure ainsi au centre de l'acte pédagogique ; il lui incombe alors, pour
bien tirer profit de la complémentarité entre les deux manuels, d'accorder une
importance à la préparation de l'activité, à son déroulement et à sa synthèse. De ce
fait, la réussite des apprentissages nécessite une alternance continue entre les deux
volumes du manuel et une mobilisation des ressources matérielles et logicielles.
Le manuel de cours est composé de huit chapitres, au début desquels sont
indiqués les objectifs à atteindre et les savoirs associés. Ces chapitres sont regroupés
en trois parties :
A - AUTOMATIQUE
B - ELECTROTECHNIQUE
C - ELECTRONIQUE
Les auteurs souhaitent que ce manuel sera utile aux professeurs et aux élèves. Il
sera une aide à la mise en relation entre les activités pratiques à réaliser et les
connaissances technologiques à acquérir pour le développement des compétences
et des capacités de génie électrique. Ils comptent beaucoup sur les remarques et
suggestions des utilisateurs de cet ouvrage pour d'éventuelles améliorations.
Les auteurs
Manuel de cours
3
COMMENT UTILISER LES MANUELS
Une fiche de préparation de la leçon
précisant l'objectif à atteindre, les conditions
de réalisation et les critères d'évaluation.
Une page mettant en évidence le chapitre
et les leçons à traiter conformément au
programme officiel de la discipline.
CHAPITRE A1
CHAPITRE A1
Système de numération
et codes
Souvenez-vous
bien du
LeçonA A1-1
Leçon
1- 1
Les Codes numériques
FICHE DE PREPARATION
O bjectifs du programme
Je me rapelle
bien de mon
-
Coder un nombre décimal
Décoder un nombre
Transcoder un nombre.
Coder une information dans un format numérique ou alphanumérique
O bjectifs de la leçon
- Coder une information dans un format numérique
- Convertir une information d'un code à un autre
Les Codes Numériques
Leçon A1-1
P rérequis
I- Mise en situation
II- Les codes numériques
1- Présentation
2- Code décimal
3- Code binaire pur
4- Code octal
5- Code hexadécimal
6- Transcodage
7- Code binaire réfléchi
8- Code B.C.D
9- Conversion entre codes
III- Exercices résolus
IV- Exercices à résoudre
- Système de numération en décimal
C onnaissances nouvelles
- Codes numériques.
- Conversion entre certains codes.
C onditions de réalisation et moyens
-
Les Codes Alphanumériques
Leçon A1-2
I - Mise en situation
II - Le code ASCII
III- Le code à barres
IV- Exercice à résoudre
Manuel de cours
C ritères d’évaluation
- Information correctement codée.
- Conversion entre codes réussie.
6
Manuel de cours
7
LeçonA A1-1
Leçon
1- 1
CHAPITRE A1
I
Calculatrice scientifique.
Micro- ordinateur + logiciel Windows (fichier calculatrice)
Logiciels de simulation électronique.
Simulateur logique et kits.
Les Codes numériques
Le cours présente les notions nouvelles
avec des renvois aux activités pratiques.
Un résumé est proposé en fin de chapitre.
Mise en Situation
I- 1- Activité de découverte
a- Réaliser l’activité de découverte du manuel d’activités TP A1- 1
b- Exemple de code
microordinateur
Code
postal
Localité
1000 BAB BHAR
1000 BAB EL JAZIRA
1069 HABIB THAMEUR
1002 HEDI CHAKER
1073 MONPLAISIR
1001 REPUBLIQUE
ordinateur
N’oubliez pas de mentionner le code
postal dans vos correspondances
R
OU
S
- Le code postal est l’information fondamentale et indispensable d’une adresse.
- Identifiant unique et universel, il détermine sans équivoque la localité du
destinataire et facilite l’acheminement et le tri des envois.
C
DE
I- 2- Généralités
a- introduction
E
NU
L
Une activité de découverte réalisée lors
de la phase de mise en situation des
apprentissages permettant à l'élève de
réactiver ses prés-requis et de se
préparer à aborder les nouveaux
concepts.
Les codes numériques ne traitent que des nombres binaires composés de 0 et de 1.
Les codes alphanumériques permettent l’exécution de fonctions spécifiques afin
d’améliorer les performances du matériel numérique.
MA
En effet, le clavier d’un ordinateur porte des touches sur lesquelles sont indiquées les
lettres de l’alphabet, les chiffres, les signes de ponctuation ….. (Information source). Le
nombre de fils conducteurs reliant l’unité centrale au clavier est nettement inférieur au nombre
de ces touches.
Une simple analyse montre que l’information source est codée avant d’être transférée à
l’unité de traitement sous forme d’information image.
b- Definition
Un système de numération permet de coder une information en lui associant symbole ou
une combinaison de symboles qui permet de la faire communiquer.
La connexion entre le clavier, l’unité centrale et l’écran peut être matérialisée par le schéma
synoptique suivant :
Manuel de cours
Manuel de cours
8
4
Leçon A
A 33- 13
Leçon
Le Grafcet
Chapitre A3
Les activités proposées se
déroulent en classe en groupes
réduits d'élèves facilitant aux
apprenants
l'expérimentation,
l'observation, l'interprétation des
résultats et l'acquisition des
nouveaux concepts.
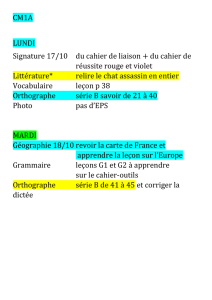
I- 2- Activité 1
Réaliser l'activité 1 du manuel d'activités TP A3- 3
I- 3- Exemple : unité de perçage
I- 3- 1- Présentation
la figure suivante représente une unité de perçage.
M
U
AN
E
E
LD
C
R
OU
S
I- 3- 2- Description du fonctionnement
L'opérateur place une pièce P à percer sur l'étau de serrage. L'action sur un bouton
poussoir (S) de mise en marche provoque le cycle de fonctionnement suivant :
- serrer la pièce
- percer la pièce
- desserrer la pièce
Manuel de cours
Leçon A1-1 :
LES CODES NUMÉRIQUES
Dossier Pédagogique
TP A1-1
N.B : la pièce est dégagée manuellement.
80
Activité 3
En appliquant la règle de conversion du binaire réfléchi / binaire naturel.
3 Compléter la table de vérité ci-contre :
3 Déterminer l'équation logique de Bj
Bj+1
0
0
0
1
1
0
1
1
.…………………………..........…………………...........
..…………………………..........…………………..........
…………………………..........…………………............
.…………………………..........…………………...........
Les exercices résolus permettent
aux élèves d'appliquer les nouveaux
acquis quant aux exercices à
résoudre ils développent la maîtrise
de ces acquis.
MA
NU
EL
D’A
Naturel
Gray
Nombre en code pur
Nombre en Code Gray
correspondant :
CTI
Naturel
Gray
G3 G2 G1 G0 B3 B2 B1 B0
G3 G2 G1 G0 B3 B2 B1 B0
0
0
0
0
1
1
0
0
0
0
0
1
1
1
0
1
0
0
1
1
1
1
1
1
0
0
1
0
1
1
1
0
0
1
0
0
1
0
0
1
0
1
1
0
0
1
1
1
1
0
0
1
1
0
1
0
ES
VIT
1
0
1
1
0
1
0
1
1
1
0
1
En utilisant le circuit intégré 4030 (CMOS) ou 7486 (TTL) compléter le câblage du convertisseur
Gray-binaire sur plaque à essai et simuler son fonctionnement.
LeçonA A1-1
Leçon
1- 1
Les Codes numériques
B3
III
Bj
3 A l’aide d’un logiciel de CAO simuler le montage suivant et remplir le tableau
Figure A-1-5
CHAPITRE A1
Gj
B2
B1
B0
Exercices Résolus
Exercice 1
Coder en binaire pur les nombres décimaux suivants 5 ; 56 et 19.
4x 5601
Solution
5 2
1 2 2
0
2
1 0
(5)10 = (101)2
Figure A-1-6
56 2
19 2
0 28 2
1 9 2
0 4 2
0 14 2
0
0 7 2
2
0
1 3 2
2
1
1
1 0
1 0
(56)10 = (111000)2
Manuel d’activités
8
(19)10 = (10011)2
Exercice 2
Décoder les nombres binaires (N)2 = 1000 1001 et (N)2 = 111 1010 0101 .
Solution
(1000 1001)2 = (1x27 + 0x26 + 0x25 + 0x24 + 1x23 + 0x22 + 0x21 + 1x20)10 = (137)10
(111 1010 0101)2 = (1x210+ 1x29 + 1x28 + 1x27 + 0x26 + 1x25 + 0x24 + 0x23 + 1x22 + 0x21 +
1x20)10 = (1957)10
Pour atteindre les mêmes objectifs
et selon le matériel didactique
disponible au laboratoire d'autres
activités d'apprentissage peuvent
être envisagées.
Exercice 3
Convertir les nombres décimaux 279 et 149 en BCD :
Solution
2 s'écrit (0010)2
7 s'écrit (0111)2
1 s'écrit (0001)2
4 s'écrit (0100)2
9 s'écrit (1001)2
9 s'écrit (1001)2
Donc
(279)10 = (0010 01111001)BCD
Manuel de cours
Manuel de cours
Donc
(149)10 = (0001 0100 1001)BCD
18
5
Chapitre A1
Système de numération
et codes
Souvenez-vous
bien du code
Leçon A1-1
Je me rapelle bien
de mon code
Les Codes Numériques
I- Mise en situation
II- Les codes numériques
1- Présentation
2- Code décimal
3- Code binaire pur
4- Code octal
5- Code hexadécimal
6- Décodage
7- Transcodage
8- Code binaire réfléchi
9- Code B.C.D
10- Conversion entre codes
III- Exercices résolus
IV- Exercices à résoudre
Leçon A1-2
Les Codes Alphanumériques
I - Mise en situation
II - Le code ASCII
III- Le code à barres
IV- Exercice à résoudre
Manuel de cours
6
Leçon A1-1
Chapitre A1
Les Codes numériques
FICHE DE PREPARATION
O bjectifs du programme
-
Coder un nombre décimal
Décoder un nombre
Transcoder un nombre.
Coder une information dans un format numérique ou alphanumérique
O bjectifs de la leçon
- Coder une information dans un format numérique
- Convertir une information d'un code à un autre
P rérequis
- Système de numération en décimal
C onnaissances nouvelles
- Codes numériques.
- Conversion entre certains codes.
C onditions de réalisation et moyens
-
Calculatrice scientifique.
Micro- ordinateur + logiciel Windows (fichier calculatrice)
Logiciels de simulation électronique.
Simulateur logique et kits.
C ritères d’évaluation
- Information correctement codée.
- Conversion entre codes réussie.
Manuel de cours
7
Leçon A1-1
Chapitre A1
I
Les Codes numériques
Mise en Situation
I- 1- Activité de découverte
a- Réaliser l’activité de découverte du manuel d’activités TP A1- 1
b- Exemple de code
microordinateur
Code
postal
Localité
1000 BAB BHAR
1000 BAB EL JAZIRA
1069 HABIB THAMEUR
ordinateur
1002 HEDI CHAKER
1073 MONPLAISIR
1001 REPUBLIQUE
N’oubliez pas de mentionner le code
postal dans vos correspondances
- Un code postal est une information fondamentale et indispensable d’une adresse.
- Un identifiant unique et universel, il détermine sans équivoque la localité du
destinataire et facilite l’acheminement et le tri des envois.
I- 2- Généralités
a- introduction
Les codes numériques ne traitent que des nombres binaires composés de 0 et de 1.
Les codes alphanumériques permettent l’exécution de fonctions spécifiques afin
d’améliorer les performances du matériel numérique.
En effet, le clavier d’un ordinateur porte des touches sur lesquelles sont indiquées les
lettres de l’alphabet, les chiffres, les signes de ponctuation ….. (Information source). Le
nombre de fils conducteurs reliant l’unité centrale au clavier est nettement inférieur au nombre
de ces touches.
Une simple analyse montre que l’information source est codée avant d’être transférée à
l’unité de traitement sous forme d’information image.
b- Definition
Un système de numération permet de coder une information en lui associant un symbole
ou une combinaison de symboles qui permettent de la faire communiquer.
La connexion entre le clavier, l’unité centrale et l’écran peut être matérialisée par le schéma
synoptique suivant :
Manuel de cours
8
Leçon A1-1
Chapitre A1
Les Codes numériques
Source
d’information
Image
d’information
Unité centrale
Clavier
Ecran
II Les codes Numériques
II- 1 - Réaliser l’activité 1 du manuel d’activités TP A1 - 1
II- 2 - Rappel : Code décimal.
milliers
centaines
dizaines
unités
Le système usuel de numération utilise le code décimal. Dans ce système, le nombre de
symboles utilisés est 10 (0, 1, 2, 3, 4, 5, 6, 7, 8, 9). Ces symboles s’appellent des chiffres.
Le nombre (10) représente la base (B) du code décimal.
Ainsi le nombre décimal 2056 peut être représenté sous la forme suivante :
2056 = 2000 + 0 + 50 + 6 où :
2
0
5
6
Chiffre le plus significatif
Chiffre le moins significatif
(2056)10 = 2.103 + 0 .102 + 5.101 + 6. 100
Poids le plus fort
Base
Poids le plus faible
II- 3- Code binaire (Base 2)
a- Présentation
Le code binaire est le résultat d’une opération de conversion permettant de traduire une
donnée quelconque en un nombre ne comportant que des 0 et des 1.
A chaque nombre codé en décimal correspond un seul nombre codé en binaire. On donne
ci-dessous des exemples :
en décimal
en binaire
Manuel de cours
0
1
2
3
4
5
6
etc...
0
1
10
11
100
101
110
etc...
9
Leçon A1-1
Chapitre A1
Les Codes numériques
D’une façon générale un nombre binaire s’écrit comme suit :
b7
Bit le plus
significatif
MSB
b6
b5
b4
b3
b2
b1
b0
Bit le moins
significatif
LSB
Bit
- Mot binaire : ce nombre (b7 b6 b5 b4 b3 b2 b1 b0)2 est généralement appelé mot
binaire.
- Poids ou pondération : coefficient attaché au rang d'un chiffre dans un système de
numération.
- LSB et MSB : en numération binaire, on parle du bit de plus faible poids (LSB) qui est la
position binaire la plus à droite dans un mot et du bit de plus fort poids (MSB) qui
représente le bit situé le plus à gauche dans un mot.
MSB: Most Significant Bit ou bit le plus significatif.
LSB: Least Significant Bit ou bit le moins significatif.
b- Conversion d’un nombre décimal en un nombre binaire (codage)
L’opération de conversion d’un nombre décimal en binaire est appelée codage. Pour écrire
(88)10 en binaire, on utilise la méthode des divisions successives par 2 jusqu’à un quotient
égal à 0. Les restes successifs pris de bas en haut forment le nombre binaire recherché.
b- 1- Exemple : coder les nombres (88)10 et (45)10 en binaire.
b- 2- Solution
88 2
0 44 2
0 22 2
0 11 2
1 5 2
1 2 2
1 1 2
0 0
(88)10 = (1011000)2
LSB
LSB
45 2
1
2
0
2
1
2
1
2
0
2
1 0
(45)10 = (101101)2
MSB
MSB
b- 3- Remarques
- Le nombre binaire obtenu par divisions successives par 2 est appelé nombre binaire pur ou
nombre binaire naturel.
- Ce système de numération binaire présente l’avantage d’être traité par des dispositifs
numériques.
Manuel de cours
10
Leçon A1-1
Chapitre A1
Les Codes numériques
c- Conversion d’un nombre binaire en un nombre décimal (décodage)
c- 1- Exemple : écrire en décimal (ou décoder) le nombre (10011)2.
c- 2- Solution : (101101)2 = 1x25 + 0x24 + 1x23 + 1x22 + 0x21 + 1x20
= 32 + 0 + 8 + 4 + 0 + 1 = (45)10
II- 4- Code octal (Base 8)
a- Présentation
Le code octal est le résultat d’une opération de conversion permettant de traduire un
nombre quelconque en un nombre ne comportant que des chiffres 0, 1, 2, 3, 4, 5, 6 et 7.
A chaque nombre codé en décimal correspond un seul nombre codé en binaire. On donne
ci-dessous des exemples :
en décimal
0
1
2
3
4
5
6
7
8
etc...
en octal
0
1
2
3
4
5
6
7
10
etc...
b- Conversion d'un nombre décimal en un nombre octal (codage)
L’opération de conversion d'un nombre décimal en octal est appelée codage. Pour écrire
(88)10 en octal, on utilise la méthode des divisions successives par 8 jusqu'à un quotient égal
à 0. Les restes successifs pris de bas en haut forment le nombre codé en octal recherché.
b- 1- Exemple : coder les nombres (88)10 et (45)10 en octal.
b- 2- Solution :
88 8
0 11 8
3 1 8
1 0
45 8
5 5 8
5 0
(88)10 = (130)8
(45)10 = (55)8
c- Conversion d'un nombre octal en un nombre décimal (décodage)
c-1- Exemple : écrire en décimal (ou décoder) le nombre (123)8.
c-2- Solution
(123)8 = 1x 82 +
= 64
Manuel de cours
2x81 + 3 x 80
+ 16 + 3 = (83)10
11
Leçon A1-1
Chapitre A1
Les Codes numériques
II- 5- Code hexadécimal (Base 16)
a- Présentation
Le code hexadécimal est le résultat d’une opération de conversion permettant de traduire
un nombre quelconque, en un nombre ne comportant que les signes de 0 à 9, A, B, C, D, E
et F
A chaque nombre codé en décimal correspond un seul nombre codé en hexadécimal. On
donne ci-dessous des exemples :
en décimal
0
1
...
9
10
11
12
13
14
15
16
en hexadécimal
0
1
...
9
A
B
C
D
E
F
10
b- Conversion d'un nombre décimal en un nombre hexadécimal (codage)
L’opération de conversion d'un nombre décimal en hexadécimal est appelée codage. Pour
écrire (88)10 en hexadécimal, on utilise la méthode des divisions successives par 16 jusqu'à
un quotient égal à 0. Les restes successifs, pris de bas en haut, forment le nombre codé en
hexadécimal recherché.
b- 1- Exemple : coder les nombres (88)10 et (45)10 en hexadécimal.
b- 2- Solution
88 16
8 5 16
5 0
D
(88)10 = (85)16
45 16
13 2 16
2 0
(45)10 = (2D)16
c- Conversion d'un nombre hexadécimal en un nombre décimal (décodage)
c-1- Exemple : écrire en décimal (ou décoder) le nombre (123)16.
c-2- Solution :
(123)16 = 1x162 + 2x161 + 3x160
= 256
+ 32
+3
= (291)10
Manuel de cours
12
Leçon A1-1
Chapitre A1
Les Codes numériques
II- 6- Décodage
a- Définition
D’une façon générale un nombre quelconque écrit en base m (m ∈ N) peut être converti
en base 10 de la façon suivante :
n=i-1
(Y)10 =
∑ Xn . m
n
- (Y)10 : nombre écrit en base 10.
n=0
- i : nombre de symboles.
- n : rang.
- Xn : symbole de la base de rang n.
Un nombre en base m est la somme des
produits des symboles par les poids
correspondants.
- m : base.
- mn : poids de rang n
b-1- Exemple : décoder les nombres (10110)2 ; (537)8 et (AC53)16
b-2- Solution :
n=4
(10110)2
⇒ (Y)10 =
∑ Xn . 2
n
= 1x24 + 0x23 + 1x22 + 1x21 + 0x20 = (22)10
n
= 5x82 + 3x81 + 7x80 = (351)10
n=0
n=2
⇒
(537)8
(Y)10 =
∑ Xn . 8
n=0
n=3
(AC53)16
⇒ (Y)10 =
∑ Xn . 16
n
= Ax163 + Cx162 + 5x161 + 3x160 = (44115)10
n=0
II- 7- Transcodage
a- Définition
Le transcodage d'un nombre n (n ∈ N) est la conversion de ce dernier entre deux
systèmes de bases autres que le système décimal.
Manuel de cours
13
Leçon A1-1
Chapitre A1
Les Codes numériques
b- Méthode de transcodage
D'une manière générale, pour transcoder un nombre d'une base m en une base n, il faut :
1- décoder le nombre de base m,
2- coder ce dernier (résultat de conversion en décimal) à la base n.
Décodage
Codage
Transcodage
c- Cas particuliers
Le transcodage peut être réalisé directement dans les cas particuliers suivants :
c-1- Transcodage binaire-octal
Transcodage du nombre (1110011)2 en octal:
Chaque lot de trois bits du nombre binaire correspond à un chiffre codé en octal.
( 001 110 011 )2
001
110
011
1
6
3
(1110011)2= (1 6 3)8
c-2- Transcodage octal-binaire
Transcodage du nombre (163)8 en binaire:
chaque chiffre codé en octal est converti en binaire sur un format de trois bits
(1 6 3)8
001
Manuel de cours
110
011
14
(163)10 = (001 110 011)2
Leçon A1-1
Chapitre A1
Les Codes numériques
c-3- Transcodage binaire-hexadécimal
Transcodage du nombre (1110011)2 en hexadécimal :
chaque lot de 4 bits du nombre binaire correspond à un signe codé en hexadécimal
(0111 0011 )2
0111
0011
7
3
(1110011)2= (7 3)16
c-4- Transcodage hexadécimal-binaire
Transcodage du nombre (73)16 en binaire :
chaque chiffre codé en octal est converti en binaire sur un format de quatre bits
(73)16
0111
0011
(73)16 = (0111 0011)2
II- 8- Code binaire réfléchi ou code Gray
Le code Gray ou binaire réfléchi permet de coder une valeur numérique en cours
d'évolution successive en une suite de configurations binaires dans lesquelles un seul bit
change d'état lorsqu'on passe d'un mot binaire au mot binaire immédiatement supérieur ou
immédiatement inférieur ou tout autre mot symétrique (ou adjaçent). Cette propriété est
utilisée pour la simplification graphique des équations logiques.
Nous pouvons établir le code Gray en utilisant le principe de réflexion par miroir plan
comme suit :
Manuel de cours
15
Leçon A1-1
Chapitre A1
Les Codes numériques
Pour un seul bit
Pour deux bits
0
0
1
1
0
1
Pour trois bits
0
1
1
0
0
0
0
0
1
1
1
1
Miroir
0
0
1
1
1
1
0
0
0
1
1
0
0
1
1
0
Miroir 1
Miroir 2
Equivalence entre décimal, binaire et Gray
Décimal Binaire
c
b
a
0
0
0
0
0
1
0
1
1
0
1
0
1
1
0
1
1
1
1
0
1
1
0
0
0
1
2
3
4
5
6
7
Réflexion
Réflexion
0000
0001
0010
0011
0100
0101
0110
0111
Décimal Binaire
Gray
0000
0001
0011
0010
0110
0111
0101
0100
8
9
10
11
12
13
14
15
1000
1001
1010
1011
1100
1101
1110
1111
Gray
1100
1101
1111
1110
1010
1011
1001
1000
II- 9- Code B.C.D.
a- Définition
Le code B.C.D (Binary Coded Decimal) : décimal Codé Binaire (D.C.B) est un code
principalement utilisé dans la fonction affichage. Chaque chiffre décimal est codé en binaire
sur quatre bits (Quartet) comme suit :
Nombre
décimal
0
Equivalent
en B.C.D
1
2
3
4
5
6
7
8
9
0000 0001 0010 0011 0100 0101 0110 0111 1000 1001
b-1- Exemples : coder en BCD les nombres (325)10 et (827)10
b-2- Solution :
(3 2 5)10
0011
0010
(8 2 7)10
0101
1000
(325)10 = (0011 0010 0101)BCD
Manuel de cours
0010
0111
(827)10 = (1000 0010 0111)BCD
16
Leçon A1-1
Chapitre A1
Les Codes numériques
II- 10- Conversion entre codes binaires
II- 10- 1- Conversion du binaire naturel en binaire réfléchi
a- Méthode de conversation
b-1- Exemple
L’opération de conversion est basé sur la Soit à convertir le nombre binaire naturel
comparaison entre les bits du nombre écrit en (1101)2 en binaire réfléchi.
binaire naturel tel que :
b-2- Solution
- le premier chiffre (de poids le plus fort) du
naturel est le même que le chiffre du réfléchi ;
B0
B3
B2
B1
- si les bits Bj+1 et Bj ont même valeur (0 ou 1),
1
1
0
1 Nombre binaire pur
le chiffre correspondant en binaire réfléchi
est Gj = 0 ;
- si les bits Bj+1 et Bj ont des valeurs
G1
G0 Nombre en code Gray
G3
G2
différentes, alors le chiffre correspondant en
1
1
1
0
binaire réfléchi est Gj = 1.
(1101)2 = (1011)réfléchi
c- Application : réaliser l'activité 2 du manuel d'activités TP A1- 1.
II- 10- 2- Conversion du binaire réfléchi en binaire naturel
a- Methode de conversion
Pour convertir un nombre du binaire réfléchi
au binaire naturel :
- au début, on reproduit le chiffre qui a le poids
le plus fort (1er chiffre à gauche) qui devient le
1er chiffre du binaire naturel ;
- ensuite, on compare le chiffre du rang (j+1) du
binaire naturel à celui du rang (j) du binaire
réfléchi. Selon le resultat des comparaisons
suivantes, on obtient :
>
si (B j+1)2 = (Gj) réfléchi
alors (Bj)2 = 0
>
si (B j+1)2 ≠ (Gj) réfléchi
alors (Bj)2 = 1
b-1- Exemple
Convertir le nombre binaire réfléchi 1101
en binaire naturel.
b-2- Solution
G3 G2 G1 G0
1 1 0 1
1 0 0 1
B3 B2 B1 B0
Nombre en code Gray
Nombre binaire naturel
(1101) réfléchi = (1001)2
c- Application : Réaliser l'activité 3 du manuel d'activités TP A1- 1.
Manuel de cours
17
Leçon A1-1
Chapitre A1
Les Codes numériques
III Exercices Résolus
Exercice 1
Coder en binaire pur les nombres décimaux suivants 5 ; 56 et 19.
Solution
5 2
1 2 2
0 1 2
1 0
(5)10 = (101)2
56 2
19 2
0 28 2
1 9 2
1 4 2
0 14 2
0 2 2
0 7 2
0 1 2
1 3 2
1 0
1 1
1 0
(56)10 = (111000)2
(19)10 = (10011)2
Exercice 2
Décoder les nombres binaires (N)2 = 1000 1001 et (N)2 = 111 1010 0101 .
Solution
(1000 1001)2 = (1x27 + 0x26 + 0x25 + 0x24 + 1x23 + 0x22 + 0x21 + 1x20)10 = (137)10
(111 1010 0101)2 = (1x210+ 1x29 + 1x28 + 1x27 + 0x26 + 1x25 + 0x24 + 0x23 + 1x22 + 0x21 +
1x20)10 = (1957)10
Exercice 3
Convertir les nombres décimaux 279 et 149 en BCD :
Solution
2 s'écrit (0010)2
1 s'écrit (0001)2
4 s'écrit (0100)2
7 s'écrit (0111)2
9 s'écrit (1001)2
9 s'écrit (1001)2
Donc
(279)10 = (0010 01111001)BCD
Manuel de cours
Donc
(149)10 = (0001 0100 1001)BCD
18
Leçon A1-1
Chapitre A1
Les Codes numériques
Exercice 4
Convertir en binaire Gray les nombres binaires purs suivants (10110)2 et (1001011)2
Solution
B4
0
B3
0
B2
1
B0
1
B0
0
1
G4
1
G3
1
G2
0
G1
1
G0
Nombre binaire pur
Nombre en code Gray
B6
B5
B4
B3
B2
B0
B0
1
0
0
1
0
1
1
1
G6
1
G5
0
G4
1
G3
1
G2
1
G1
0
G0
Nombre binaire pur
Nombre en code Gray
Exercice 5
Convertir en binaire naturel les nombres binaires réfléchis suivants (10110)2 et (1001011)2
Solution
G4 G3 G2 G0 G0
1 0 1 1 0
1
1
0
1 1
B4 B3 B2 B1 B0
Manuel de cours
G6 G5 G4 G3 G2 G1 G0
Nombre binaire pur
Nombre en code Gray
1 0
0
1
0
1
1
Nombre binaire pur
1 1
1 0
0
1
0
Nombre en code Gray
G6 G5 G4 G3 G2 G1 G0
19
Leçon A1-1
Chapitre A1
Les Codes numériques
IV Exercices à résoudre
Exercice 1
Convertir en décimal les nombres binaires suivants :
(10110)2 ; (100011)2 et (1001010)2
Exercice 2
Convertir en binaire pur puis en binaire réfléchi les nombres suivants :
(37)10, (189)10, (14)10 et (205)10
Exercice 3
Compléter le tableau suivant :
Décimal
65
Binaire
Réfléchi
Octal
45
Hexadécimal
2D
177
101011
100101
52
111001
71
1101
1100001
110001
21
Exercice 4
Transcrire les chiffres décimaux ci-dessous en code BCD :
378 ; 1004 ; 5432 ; 12567 ; 425689 et 1000000
Exercice 5
Classer dans l'ordre croissant les nombres suivants :
(11111001)2 ; (1101)10 ; (1101)2 ; (1000)2 ; (1000)10 et (100100010101)BCD ; (123)8 ;
(1000)16 .
Manuel de cours
20
Leçon A1-2
Chapitre A1
Les Codes numériques
FICHE DE PREPARATION
O bjectif du programme
- Coder une information dans un format numérique ou alphanumérique
O bjectif de la leçon
Coder et lire une information en :
- code ASC II .
- code à barres
P rérequis
- Les codes numériques.
C onnaissances nouvelles
- Codes ASCII.
- Code à barres.
C onditions de réalisation et moyens
- Micro- ordinateur + éditeur de textes.
C ritère d’évaluation
Information correctement codée en ASC II.
Manuel de cours
21
Leçon A1-2
Chapitre A1
Les Codes numériques
I Mise en Situation
Activité de découverte :
réaliser l'activité de découverte du manuel d'activités TP A1- 2.
II Code ASCII
II- 1- Présentation
Le code ASCII (American Standard Code for Information Interchange) est utilisé en
informatique pour communiquer entre le clavier du micro- ordinateur et l'unité centrale. On
distingue deux codes ASCII : le code ASCII standard et le code ASCII étendu. Le clavier est
équipé d'un circuit spécial qui contrôle ses circuits en permanence. A chaque touche
correspond un mot binaire. Le code ASCII standard possède 128 caractères, le code ASCII
étendu en possède 256. Pour coder l'ensemble des caractères il faut 7 bits pour le code
ASCII standard et 8 bits pour le code ASCII étendu. Le tableau du code ASCII standard est
le suivant :
B3
B2
B1
B0
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
0
0
0
0
1
1
1
1
0
0
0
0
1
1
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Manuel de cours
B6
0
0
0
0
1
1
1
1
B5
0
0
1
1
0
0
1
1
B4
0
1
0
1
0
1
0
1
NUL
SOH
STX
ETX
EOT
ENQ
ACK
BEL
BS
HT
LF
VT
FF
CR
SO
SI
DLE
DC1
DC2
DC3
DC4
NAK
SYN
ETB
CAN
EM
SUB
ESC
FS
GS
RS
US
SP
!
0
1
2
3
4
5
6
7
8
9
:
;
<
=
>
?
@
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
P
Q
R
S
T
U
V
W
X
Y
Z
[
\
]
^
-
22
//
=
$
%
&
‘
(
)
*
+
,
.
/
a
b
c
d
e
f
g
h
i
j
k
l
m
n
o
p
q
r
s
t
u
v
w
x
y
z
{
}
~
~
DEL
Leçon A1-2
Chapitre A1
Les Codes numériques
Remarque
Le bit 6 (B6) est le MSB et le bit 0 (B0) est le LSB
Exemple : voir tableau précédent.
* La lettre "E" correspond au mot binaire (1000101)2 soit 69 à la base 10.
* La lettre "a" correspond au mot binaire (1100001)2 soit 97 à la base 10.
II- 2- Application : réaliser l'activité 1 du manuel d'activités
TP A1- 2.
III Le code à barres
III- 1- Structure d'un code à barres
Le code à barres, qui figure sur la plupart des emballages des produits de consommation
courante, est la fiche d'identité, traduite en code, du produit sur lequel il est apposé. Il peut
indiquer le pays d'origine, le nom du fabricant, celui du produit et sa référence. Il permet de
suivre la traçabilité du produit.
Le code, imprimé parfois directement sur l'emballage, se présente également sous la
forme d'une étiquette rectangulaire collée. Il est composé de barres et d'espaces larges ou
étroits dont le nombre correspond à un ensemble de données numériques ou
alphanumériques.
Ce marquage comporte un certain nombre de barres verticales, ainsi que des chiffres au
nombre de 13. Le premier à gauche indique le pays d'origine (3 pour France, 4 pour
Allemagne, 0 pour USA et canada, …619 pour la Tunisie …), les 5 suivants sont ceux du
code du fabricant, les 6 autres ceux du code de l'article, le 13e est une clé de contrôle. Les
barres sont le codage de ces chiffres sur 7 bits. A chaque chiffre est attribué un ensemble
de 7 espaces, blancs ou noirs.
Note :
Devant le grand nombre de pays utilisant les codes à barres EAN, il a été décidé que le
code pays pouvait comporter 2 ou 3 caractères. Dans ce dernier cas, le code fabricant ne
comporte que 3 caractères.
Manuel de cours
23
Leçon A1-2
Chapitre A1
Les Codes numériques
Table de codage
Examinons le début d'une étiquette :
elle commence par 2 barres noires,
d'épaisseur minimale. Puis vient
immédiatement après, le codage du
premier chiffre (le 2). Ce codage
s'effectue sur un champ de 7 espaces
élémentaires d'une largeur de 0.5 mm,
blancs (0) ou noirs (1), le champ
débutant, pour les chiffres situés à
gauche du milieu, par un espace blanc et
se terminant par un espace noir (et
inversement à droite).
Manuel de cours
0
1
2
3
4
5
6
7
8
9
24
0
0
0
0
0
0
0
0
0
0
à gauche
du milieu
001101
011001
010011
111101
100001
110001
101111
111011
110111
001011
à droite
1
1
1
1
1
1
1
1
1
1
1
1
1
0
0
0
0
0
0
1
1
0
0
0
1
0
1
0
0
1
0
0
1
0
1
1
0
0
1
0
0
1
1
0
1
1
0
1
0
1
1
1
0
1
0
1
0
0
0
0
0
0
0
0
0
0
0
0
0
0
Leçon A1-2
Chapitre A1
Les Codes numériques
Exemple :
Les codes à barres offrent une méthode rapide, facile et précise pour saisir des données.
Une utilisation judicieuse des codes à barres peut réduire les délais nécessaires aux
employés pour effectuer certaines tâches et augmenter l'efficacité d'une équipe.
III- 2- Les différents lecteurs de codes à barres
La lecture de l'étiquette se fait par un
dispositif très simple comprenant une source
lumineuse et un récepteur photoélectrique de
la lumière réfléchie par l'étiquette.
Il existe trois types de lecteurs de codes à
barres :
- les lecteurs fixes ;
- les lecteurs portables à transmission par
lots ;
- les lecteurs à fréquences radio.
Les lecteurs à fréquence radio
Manuel de cours
Les lecteurs clavier Wedge
pour PC
Les crayons optiques
25
Les crayons optiques
à fréquence radio
Leçon A1-1
Chapitre A1
Les Codes numériques
Les lecteurs laser sans fil
Les lecteurs douchette CCD
Les lecteurs de badges
IV Exercice à résoudre
En utilisant le tableau de correspondance du code ASCII, compléter le tableau suivant :
}
caractère ASCII
équivalent décimal
équivalent binaire
Manuel de cours
65
1101
26
C
7
a
Leçon A1-1
Chapitre A1
Les Codes numériques
L’essentiel
Codes
Symboles
Exemples
Code décimal
0, 1, 2, 3, 4, 5, 6, 7, 8, 9
45; 78
Code binaire
0, 1
(101)
Code BCD
0, 1
1001 0001
On rencontre trois types de conversion :
- conversion d'un nombre décimal en binaire : codage.
- conversion d'un nombre autre que le décimal en décimal : décodage.
- conversion entre deux systèmes non décimaux : transcodage
Données utiles
Décimal
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
Binaire Naturel
0
0
0
0
0
1
0
1
0
0
1
1
1
0
0
1
0
1
1
1
0
1
1
1
0
0
0
0
0
1
0
1
0
0
1
1
1
0
0
1
0
1
1
1
0
1
1
1
0
0
0
0
0
0
0
0
1
1
1
1
1
1
1
1
Binaire Réfléchi
0
0
0
0
0
1
0
1
1
1
1
0
1
1
0
1
1
1
1
0
1
1
0
0
1
0
0
1
0
1
1
1
1
1
1
0
0
1
0
0
1
1
0
0
1
0
0
0
0001
0001
0001
0001
0001
0001
BCD
0000
0001
0010
0011
0100
0101
0110
0111
1000
1001
0000
0001
0010
0011
0100
0101
Savoir plus : significations des caractères spéciaux du code ASCII
NUL
SOH
STX
ETX
EOT
ENQ
ACK
BEL
BS
HT
LF
VT
FF
CR
SO
SI
SP
Null
Start of heading
Start of text
End of text
End of transmission
Enquiry
Acknowledge
Bell
Backspace
Horizontal tab
Line feed
Vertical tab
Form feed
Carriage return
Shift out
Shift in
Space
Manuel de cours
DLE
DC1
DC2
DC3
DC4
NAK
SYN
ETB
CAN
EM
SUB
ESC
FS
GS
RS
US
DEL
27
Data- link escape
Device control 1
Device control 2
Device control 3
Device control 4
Negative acknowledge
Synchronous idle
End- off- transmission block
Cancel
End off medium
Substitute
Escape
File separator
Group separator
Record separator
Unit separator
Delete
Chapitre A3
La logique combinatoire
Leçon A2- 1
Système Combinatoire
I - Mise en situation
II - Les fonctions logiques
III - Méthode de résolution d'un problème de logique combin toire
IV - Simplification graphique par tableau de Karnaugh
V - Exercices résolus
VI - Exercices à résoudre
Leçon A2- 2
Les Circuits Combinatoires
I - Mise en situation
II - Les codeurs et les décodeurs
III - Exercices à résoudre
Manuel de cours
28
Leçon A 32- 1
Chapitre A2
Système combinatoire
FICHE DE PREPARATION
O bjectif du programme
- Résoudre un problème de logique combinatoire.
O bjectifs de la leçon
- Identifier un système combinatoire.
- Appliquer une méthode de résolution d'un problème de logique
combinatoire.
- Simplifier des équations logiques.
P rérequis
- Les fonctions logiques de base.
- Les fonctions logiques NAND et NOR.
- Les théorèmes de DEMORGAN.
C onnaissances nouvelles
- Simplification algébrique.
- Simplification graphique par tableau de Karnaugh.
- Résolution et simulation d'un problème de logique combinatoire.
C onditions de réalisation et moyens
-
Micro-ordinateur + logiciels de simulation électronique.
Simulateur logique.
Maquette didactique.
Didacticiel approprié.
C ritères d’évaluation
- Système combinatoire correctement identifié.
- Méthode de résolution des problèmes combinatoires correctement
appliquée.
- Simplification des équations logiques réussie.
Manuel de cours
29
Chapitre A2
2- 1
Leçon A 3-
Système combinatoire
I Mise en situation
I- 1- Réaliser l'activité de découverte du manuel d'activités TP A2- 1.
I- 2- Exemples de systèmes combinatoires
Montage
dit simple allumage
Montage dit
«va et vient»
Circuit d’éclairage
intérieur d’un réfrégirateur
Lorsqu'on exprime les variables de sortie uniquement en fonction des variables d'entrée
le problème à résoudre relève de la logique combinatoire. Autrement dit à chaque
combinaison des variables d'entrée correspond toujours une et une seule combinaison des
variables de sortie.
e1
e2
e3
Variables d’entrée
Variables de sortie
Les sorties S1, S2, S3……Sn sont exprimées uniquement en fonction des variables
d’entrée e1,e2,e3…..ep .
Manuel de cours
30
2- 1
Leçon A 3-
Chapitre A2
Système combinatoire
II Les fonctions logiques (rappel)
II- 1- Symboles
Symboles européens
Symboles américains
NON
OU
NON
(INVERSEUR)
Exclusif
(INVERSEUR)
ET
NON - ET
ET
(AND)
(NAND)
(AND)
OU
NON - OU
OU
(OR)
(NOIR)
(OR)
OU
Exclusif
NON - ET
(NAND)
NON -OU
(NOR)
II- 2- Rappel des propriétés des fonctions logiques de base
Addition Booléenne (réunion)
a
a
a
a
a
a
+
+
+
+
+
+
Produit Booléen (intersection)
0= a
b = b+a
1 = 1
a = a
a =1
a.b = a + b
a.(b +
a.0 =
a.1 =
a.a =
a.a =
c) = a.b + a.c
0
a
0
a
Premier théorème de Demorgan
(complément d'une somme)
Deuxième théorème de Demorgan
(complément d'un produit)
a + b + c = a. b. c
a.b.c = a+b+c
II- 3- Réaliser l'activité 1 du manuel d'activités TP A2-1.
III Résolution d’un problème de logique combinatoire
Résoudre un problème de logique combinatoire revient à trouver le circuit le plus simple
qui peut satisfaire les conditions de fonctionement de ce problème, pour cela on doit :
1) identifier les différentes variables d'entrée et de sortie ;
2) dresser la table de vérité permettant d'analyser le fonctionement et de définir les états
de sortie ;
3) écrire les équations sous leurs formes canoniques complètes ;
Manuel de cours
31
Leçon A
A 32- 11
Leçon
Chapitre A2
4)
5)
6)
7)
8)
Système combinatoire
simplifier les équations graphiquement ou algébriquement ;
établir le schéma booléen et / ou le logigramme du circuit ;
simuler le fonctionnement ;
choisir la technologie de commande ;
réaliser, éventuellement, les cartes de commande.
III- 2- Exemple
a- Système technique : distributeur de boissons
a- 1- Description
Un distributeur de boissons est équipé de deux réservoirs
contenant respectivement du café et du thé. Le débitage des
deux boissons est effectué à travers deux électrovannes EV1
pour le café et EV2 pour le thé. Un pupitre permet de
sélectionner à l'aide des touches S2 et S3 la boisson désirée.
L'introduction d'une pièce de monnaie adéquate actionne le
capteur S1 qui autorise la distribution de la boisson
sélectionnée.
Un voyant H signale l'operation de payage de la boisson et
consommer.
a- 2- Analyse du fonctionnement
Le fonctionnement de ce système est le suivant :
- la distribution ne peut se faire que si l'on a payé la boisson (S1 = 1) ;
- le café est distribué (EV1 = 1), si on a actionné S2 ;
- le thé est distribué (EV2 = 1), si on a actionné S3 ;
- l'obtention simultanée du thé et du café est interdite.
b- Etude du système
b- 1- Identification des variables
Les variables de sortie sont :
Les variables d'entrée sont :
- S1 : capteur de monnaie ;
- S2 : capteur sélectionnant le café ;
- S3 : capteur sélectionnant le thé.
Manuel de cours
- EV1 : électrovanne pour le café ;
- EV2 : électrovanne pour le thé ;
- H : voyant de payage.
32
Leçon A
A 32- 11
Leçon
Chapitre A2
Système combinatoire
S1
S2
S3
EV1
Distributeur
de Boissons
EV2
b-2- Table de vérité
S1
S2
S3
EV1
EV2
H
0
0
0
0
0
0
0
0
1
0
0
0
0
1
1
0
0
0
0
1
0
0
0
0
1
1
0
1
0
1
Demande du café
1
1
1
0
0
1
Interdiction
1
0
1
0
1
1
Demande du thé
1
0
0
0
0
1
Aucune demande
Commentaires
La boisson
n'est pas
payée
b-3- Equations logiques des sorties EV1 et EV2.
EV1 = S1.S2.S3
;
EV2 = S1.S2.S3
H = S1.S2.S3 + S1.S2.S3 + S1.S2.S3 + S1.S2.S3 + S1.S2.S3.
b-4- Simplification algébrique des équations logiques
EV1 = S1.S2.S3
EV2 = S1.S2.S3
EV1 et EV2 étant sous leur forme la plus simple.
H = S1.S2.S3 + S1.S2.S3 + S1.S2.S3 + S1.S2.S3
= S1.S2 (S3 + S3) + S1.S2 (S3 + S3)
= S1.S2 + S1.S2
= S1. (S2 + S2)
= S1
b-5- Simulation
Réaliser l'activité 2 du manuel d'activités TP A2-1
Manuel de cours
33
Leçon A 32- 1
Chapitre A2
Système combinatoire
IV Simplification graphique par tableau de Karnaugh
IV- 1- Interêt
La simplification graphique par le tableau de Karnaugh d'une fonction logique permet
d'obtenir l'expression la plus simplifiée de cette fonction.
IV- 2- Règles d'établissement du tableau de Karnough
a- Présentation
cd
00
01 11 10
ab
00
2
01
1
11
1 : Axe principal de symétrie (suivant lignes
ou colonnes).
2 : Axe secondaire de symétrie (suivant
lignes ou colonnes).
2
10
2
1
2
Cette case est identifiée par la combinaison 1010 des entrées (acbd)
Combinaisons binaires en code Gray des entrées a et b
b- Propriétés
- Axes de symétrie
Ce tableau à 4 variables admet deux axes principaux de symétrie : Un axe principal pour
les lignes et un autre pour les colonnes et quatre axes secondaires de symétrie comme le
montre la figure précédente.
- Règles d'adjacence
Deux cases sont dites adjacentes lorsque les combinaisons correspondantes de variables
d'enrée font intervenir un seul changement des états binaires de ces variables.
- Codage des cases
Chaque case correspond alors à une combinaison des valeurs binaires des variables
d'entrée.
Manuel de cours
34
2- 1
Leçon A 3-
Chapitre A2
Système combinatoire
- Taille et forme d’un tableau de karnaugh
Pour construire un tableau de karnaugh, il est évident d’identifier le nombre de colonnes, de
lignes et de cases. On exprime :
- le nombre de colonnes par k ;
- le nombre de lignes par j ;
- le nombre de variables par n ;
- le nombre de cases par 2n, avec 2n = j x K.
Plusieurs formes du tableau de Karnaugh peuvent être envisagées. En voici des exemples :
c- Exemples de tableau de Karnaugh
Exemple 1 : cas d’une seule varialbe d’entrée
• n =1 ; on a une seule variable d'entrée S1,on obtient :
21 =j k =1x2=2x1 , Soit 2 cases.
On a alors deux propositions :
S1
0
1
0
Tableau
T1
Tableau
1
T2 S1
Exemples 2 : cas de deux variables d’entrée
S1S2
• n = 2 variables d'entrée (S1et S2), on a :
4 = 4*1
2
2 = 4= jk
4 = 1*4
4 = 2*2
00
T1
T2
T3
Tableau
01
T1
11
10
00
Tableau
T2
01
11
10
S1S2
S1
S2
Tableau
T3
0
1
0
1
Cette case correspond à la combinaison
des entrées S1.S2 = 1.1
Exemples 3 : cas de 3 variables d’entrée
• n = 3 on a 3 variables d'entrée (S1, S2 et S3), on a :
8 = 1*8
T1
3
8 = 8*1
T2
2 = 8= j.k on a
8 = 2*4
T3
8 = 4*2
T4
Manuel de cours
35
Leçon A
A 32- 11
Leçon
Chapitre A2
Système combinatoire
Tableau T1
Tableau T2
S1S2S3
S1S2S3
000
000
001
011
010
110
111
101
100
001
011
010
110
Axe de symétrie principal
111
Axe de symétrie secondaire
101
100
Tableau T4
S1
Tableau T3
S2S3
S1S2
S3
0
1
00
00
01
11
10
01
0
11
1
10
Exemples 4 : cas de 4 variables d’entrée
Si n = 4 variables d'entrée (S1, S2, S3 et S4), on a :
T1
T2
16 = 1*16
16 = 16*1
4
2 = 16= j*k =
16 = 8*2
T3
T4
16 = 4*4
T5
16 = 2*8
Remarque : on retient les tableaux 3 et 5
Tableau T3
S1S2S3
S4
000
001
011
010
110
111
101
100
0
1
Tableau T5
S1S2
S3S4
00
01
11
10
00
Remarques :
01
• Si le nombre de variables est paire on choisira j = K.
11
• Si le nombre de variables est impaire on choisira
10
Manuel de cours
K=2*j.
36
Chapitre A2
Leçon A
A 32- 11
Leçon
Système combinatoire
d- Utilisation du tableau de Karnaugh
- Chaque case du tableau de Karnaugh correspond à une combinaison des variables
d'entrée (intersection ligne / colonne)
- Pour chacune des combinaisons d'une fonction logique où la sortie est vraie (égale à 1
logique) on attribue à la case correspondante la valeur logique 1. Dans le cas contraire on
attribue 0 cependant il arrive que des cases restent sans attribution. Pour ces cases on
attribue le symbole ø (valeur indéfinie ou indéterminée pouvant être soit 1, soit 0)
- On regroupe, ensuite, les cases ayant même valeur (1 ou 0).
- L'affectation des cases ø par 0 ou 1 doit permettre la simplification davantage des
équations.
Voir paragraphe règles de groupement.
d-1- Mise en équation d'une fonction logique à partir d'un tableau de Karnaugh
Soit la fonction logique donnée par le tableau de karnaugh suivant :
S2S3
S1
0
1
00
01
11
10
0
1
-
0
1
1
-
1
H
H = S1.S2.S3 + S1.S2.S3 + S1.S2.S3 + S1.S2.S3.
d-2- Représentation d'une fonction logique par un tableau de Karnaugh.
Soit : H2 = S1.S2 + S1.S2
Sur le tableau de Karnaugh, attribuons la valeur binaire (1) aux cases dont :
- la combinaison S1.S2 correspond à S1=1 et S2 = 0 ;
- la combinaison S1.S2 correspond à S1=0 et S2 = 1 ;
- on attribue la valeur binaire 0 pour les autres cases.
Tableau de karnaugh de la fonction H2
Le nombre de variables d’entrée est égal à 2, il y a 22 cases.
On adopte J.K = 2.2
La variable de sortie est H2
S1
S2
0
1
Manuel de cours
0
1
0
1
1
0
H2
37
Leçon A
A 32- 11
Leçon
Chapitre A2
Système combinatoire
IV- 3- Simplification graphique
1) Règles de regroupement
Pour obtenir la forme minimale d'une fonction logique, il faut respecter les règles
suivantes :
- grouper 2p cases (p est un entier) ;
- grouper le maximum de cases ;
- respecter les adjacences et les symétries ;
- l'expression d'un groupement contient uniquement les variables qui ne changent
pas d'état.
2) Application
a- Système technique : système de gestion de vote
a- 1- Description
Dans une institution, l'adoption ou le refus d'un projet se fait par vote ; les membres du
comité de vote sont répartis en quatre groupes :
- le groupe 1 est constitué de 35 % des membres ;
- le groupe 2 est constitué de 30 % des membres ;
- le groupe 3 est constitué de 20 % des membres ;
- le groupe 4 est constitué de 15 % des membres.
Afin de rendre le vote plus rapide et discret, un système technique a été mis en place.
Chaque groupe signale son avis par l'appui sur un bouton poussoir mis à sa disposition.
- "S1" pour le groupe 1 ;
- "S2" pour le groupe 2 ;
- "S3" pour le groupe 3 ;
- "S4" pour le groupe 4.
Une lampe verte s'allume (HV=1) indiquant l'adoption du projet si au moins 55% de
membres ont donné un avis favorable.
Dans le cas contraire une lampe rouge s'allume (HR=1) indiquant le refus du projet c'està- dire pour un nombre strictement inférieur à 55 %.
Manuel de cours
38
Leçon A
A 32- 11
Leçon
Chapitre A2
Système combinatoire
a- 2- Schéma synoptique
S1
S2
S3
S4
HV
circuit
Combinatoire
HR
b- Etude du système
b- 1- Identification des variables
Les variables d'entrée sont :
S1 pour G1 (35 %)
S2 pour G2 (30 %)
S3 pour G3 (20 %)
S4 pour G4 (15 %)
Les variables de sortie sont :
HV pour signaler l'adoption du projet
HR pour signaler le refus du projet
b- 2- Table de vérité
S1
S2
S3
S4
HV
HR
Total de
vote en %
0
0
0
0
0
1
0
0
0
0
1
0
1
15
0
0
1
0
0
1
20
0
0
1
1
0
1
35
0
1
0
0
0
1
30
0
1
0
1
0
1
45
0
1
1
0
0
1
50
0
1
1
1
1
0
65
1
0
0
0
0
1
35
1
0
0
1
0
1
50
1
0
1
0
1
0
55
1
0
1
1
1
0
70
1
1
0
0
1
0
65
1
1
0
1
1
0
80
1
1
1
0
1
0
85
1
1
1
1
1
0
100
b- 3- Equations
HV = S1S2S3S4+S1S2S3S4 +S1S2S3S4+S1S2.S3.S4 +S1S2S3.S4 +S1S2S3S4
+S1S2S3S4
HR = S1.S2.S3.S4+S1S2S3S4 +S1S2S3S4+S1S2.S3.S4 +S1S2S3.S4 +S1S2S3S4
+S1S2S3S4+S1S2S3S4+S1S2S3S4
Manuel de cours
39
Leçon A
A 32- 11
Leçon
Chapitre A2
Système combinatoire
b- 4- Simplification graphique des équations :
S1S2
S2S3S4
S1S2
S1.S3
00
01
11
10
00
0
0
1
0
01
0
0
1
11
0
1
10
0
0
S1.S2
S1.S2
S1.S3
S1.S4
S2.S3
00
01
11
10
00
1
1
0
1
0
01
1
1
0
1
1
1
11
1
0
0
0
1
1
10
1
1
0
0
S3S4
S3.S4
HR
HV
HV = S1.S2+S1.S3+S2S3S4
HR = S1.S2+S1.S3+S1.S4+S2.S3
b- 5- Logigramme
b- 6- Simulation
Réaliser l'activité 3 du manuel d'activités TP A2- 1.
b- 7- Application
Réaliser l'activité 4 du manuel d'activités TP A2- 1.
Manuel de cours
40
Chapitre A2
Leçon A
A 32- 11
Leçon
Système combinatoire
V Exercices résolus
Exercice 1
Le résultat d'une étude, par la logique combinatoire d’une fonction F, a donné le
logigramme suivant. Retrouver l'expression algébrique de cette sortie et la simplifier si
possible.
Exercice 2
Simplifier les équations de S1, S2 et S3 suivantes
Donnée
Solution
Exercice 3
Simplifier l'équation suivante par la méthode algébrique
Donnée
Solution
Manuel de cours
41
Leçon A
A 32- 11
Leçon
Chapitre A2
Système combinatoire
Exercice 4
Simplifier les équations suivantes par la méthode algébrique
Donnée
Solution
Exercice 5
Simplifier les équations suivantes par la méthode algébrique
Donnée
Solution
Exercice 6
Simplifier la méthode graphique les sorties X dans chacun des tableaux suivants :
cd
ab
00 01 11 10
0
0
0
0
00
01
11
10
0
0
0
0
0
0
1
0
cd
ab
0
0
0
0
01
11
10
cd
00 01 11 10
00
01
11
10
1
0
0
1
0
0
0
0
Solution x = bd
Manuel de cours
0
0
1
0
0
0
0
0
0
0
1
1
ab
1
0
0
1
cd
ab
00
01
11
10
01
11
10
1
0
0
1
1
0
1
1
0
0
0
0
0
0
1
1
cd
00 01 11 10
ab
0
0
1
1
cd
ab
00
0
0
0
0
01
11
10
01
11
10
x = bd
0
0
0
0
0
0
1
0
x = bd
42
0
0
1
1
0
0
1
1
0
0
1
1
x=a
00 01 11 10
0
1
1
0
0
0
1
1
00
x = ac
00 01 11 10
0
0
0
0
00 01 11 10
0
0
0
0
00
0
0
0
0
x = acd
Solution x = abcd
ab
0
0
0
0
00
cd
00 01 11 10
0
1
1
0
cd
ab
00
01
11
10
00 01 11 10
0
0
0
0
1
1
1
1
x = cd
0
0
0
0
0
0
0
0
Chapitre A2
Leçon A
A 32- 11
Leçon
Système combinatoire
VI Exercices à résoudre
Exercice 1
Simplifier les expressions suivantes par la méthode algébrique
P = (a + b ) (b + c ) (c + a)
Q=(a+b+c) (a+b +c) (a+b +c)
R = a b c + a b ( a c)
S = a c ( a b d) + a b c d + a b c
T=abc+abc+abc
U = (a + b) (a + b + d) d
V=(a+b)(a+c)+(b+c) (b+a)+(c+a) (c+b)
Exercice 2
Simplifier les équations suivantes par tableau de Karnaugh
T1 = x y z + x y z + x y z + x y z
T2 = x y z + x y z + x y z
T3 = y w + z w + z w + x y z w + x y z
Exercice 3
Un moteur électrique M entraîne un tapis roulant qui amène des carreaux à décorer en
position de décoration.
Fonctionnement :
- l'action sur l'interrupteur (s) provoque la mise sous tension du moteur ;
- l'arrivée d'un carreau en position de décoration (a) actionné provoque l'arrêt du tapis et
la descente du piston du vérin (C) ;
- l'action de (b) met en marche le tapis et la montée du piston du vérin et le cycle
recommence.
Pour arréter le système on actionne l'interrupteur (s).
Entrées
Sorties
On demande :
- la table de vérité ;
s : mise en marche
C+ : sortie de la
- les équations de (M) et de (C) ;
a : présence du
tige du verin
carreau à décorer
- le schéma booléen ;
c- : rentrée
b : mise en marche
- le logigramme avec des fonctions de bases à
M : Moteur du tapis
du tapis
deux entrées.
Exercice 4
Un moteur électrique à deux vitesses peut être mis en marche par deux boutons
poussoirs "a" , "b".
-
Au repos "a" et "b" ne sont pas actionnés.
Action sur "a" le moteur tourne lentement.
Action simultanée sur "a" et "b" le moteur tourne rapidement.
"a" relaché "b" encore actionné le moteur tourne rapidement.
"a" et "b" relachés le moteur s'arrête.
Manuel de cours
43
Chapitre A2
Leçon A
A 32- 11
Leçon
Système combinatoire
Exercice 5
- Donner les équations logiques des variables de sortie H3 et H4
définies sur la table de vérité ci- contre.
- Simplifier graphiquement les équations de sorties H3 et H4
- Dessiner le logigramme de chacune des équations logiques en
utilisant des fonctions logiques ET, OU à deux entrées et des
fonctions complémentaires si nécessaire.
- Donner les compléments des équations H3 et H4 en utilisant le
théorème de Demorgan.
Exercice 6
On se propose d'étudier un distributeur de boissons. Celui- ci
offre le choix entre le sirop de menthe (m) et du jus d'orange (o)
à condition d'avoir inséré une pièce de monnaie (p). L'eau (e)
est offerte gratuitement. L'utilisateur dispose de 3 boutons
poussoirs ainsi qu'un monnayeur pour commander ce qu'il
désire.
Ce distributeur dispose de trois électrovannes (E,M et O)
permettant de délivrer respectivement de l'eau, du sirop de
menthe ou du jus d'orange.
a- Reproduire puis compléter la table de vérité ci- contre.
b- Déterminer les équations simplifiées des sorties E, M et O.
c- Etablir le logigramme complet validant le fonctionnement du
distributeur de boissons.
Manuel de cours
44
H3
H4
Leçon A 2- 2
Chapitre A2
Les Circuits Combinatoires
FICHE DE PREPARATION
O bjectif du programme
- Résoudre un problème de logique combinatoire.
O bjectifs de la leçon
- Identifier les circuits combinatoires.
- Analyser le fonctionnement des circuits combinatoires.
P rérequis
- Systèmes combinatoires.
- Tableau de Karnaugh.
- Opérations logiques.
C onnaissance nouvelle
- Circuits combinatoires.
C onditions de réalisation et moyens
- Simulateur logique.
- Maquettes didactiques et/ ou kits complets mettant en œuvre des
circuits combinatoires.
- Système de TRI + micro- ordinateur + logiciel.
C ritères d’évaluation
- Identification correcte des circuits combinatoires.
- Circuits combinatoires correctement analysés.
Manuel de cours
45
Leçon A 2- 2
Chapitre A2
I
Les Circuits Combinatoires
Mise en situation
I- 1- Réaliser l'activité de découverte du manuel d'activités
TP A2- 2
I- 2- Introduction
Dans les systèmes numériques (calculatrices, micro- ordinateurs etc.), les données et les
informations sont codées en binaire. Leur transfert nécessite des fonctions qui peuvent être
réalisées grâce à des circuits intégrés spécifiques appelés circuits combinatoires.
Dans ce qui suit on s'intéressera à l'étude des circuits suivants : codeur, décodeurs,
additionneurs et soustracteurs.
II Les codeurs et les décodeurs
II- 1- Codeur
II- 1- 1- Principe d'un codeur B. C. D.
Dans une calculatrice les opérations d'arithmétique sont réalisées en binaires alors que
les touches de données correspondent aux chiffres décimaux ( 0 à 9). Un codeur DécimalBinaire est utilisé pour assurer cette conversion comme le montre la figure suivante :
Manuel de cours
46
Leçon A 2- 2
Chapitre A2
Les Circuits Combinatoires
Il y a 10 entrées (0,1...9) et 4 sorties (a0, a1, a2 et a3)
Logigramme
II- 1- 2- Exemples
II- 1- 2- 1- Réalisation avec circuit intégré spécialisé 74LS147
Le circuit intégré 74LS147 figuré ci-contre
convertit le complément d’une information
reçue à l’entrée matérialisant les chiffres
décimaux en un code binaire complémenté
sur un format de quatre bits (quartet).
Si on applique simultanément deux
informations décimales à l’entrée, la sortie
correspond à la valeur la plus élevée de ces
deux entrées.
Manuel de cours
47
Leçon A 2- 2
Chapitre A2
Les Circuits Combinatoires
Exemple
Table de fonctionnement du 74LS147
Entrées
Sorties
1
2
3
4
5
6
7
8
9
D
C
B
A
1
1
1
1
1
1
1
1
1
1
1
1
1
x
x
x
x
x
x
x
x
0
0
1
1
0
x
x
x
x
x
x
x
0
1
0
1
1
1
x
x
x
x
x
x
0
1
1
1
0
1
0
x
x
x
x
x
0
1
1
1
1
0
1
1
x
x
x
x
0
1
1
1
1
1
1
1
0
x
x
x
0
1
1
1
1
1
1
1
1
1
x
x
0
1
1
1
1
1
1
1
1
0
0
x
0
1
1
1
1
1
1
1
1
1
0
1
0
1
1
1
1
1
1
1
1
1
1
1
0
NB : X signifie " quelque soit le niveau logique ".
Les entrées et les sorties sont actives au niveau logique bas.
Manuel de cours
48
Leçon A 2- 2
Chapitre A2
Les Circuits Combinatoires
II- 1- 2- 2- Réalisation avec matrices à diodes
Le circuit suivant représente le schéma
d’un codeur décimal-binaire réalisé à base
de diodes à jonction et de diodes LED. A
l’action sur un bouton E (0 à 9),
matérialisant les chiffres décimaux,
correspond un code binaire composé de 4
bits obtenus par les états (allumées ou
éteintes) des diodes LED S0, S1, S2 et S3.
Le câblage des diodes à jonction
constitue une matrice à diodes.
II- 1-3- Réaliser l'activité 1 du manuel d'activités TP A2- 2
II- 2- Décodeur
II- 2-1- principe d'un décodeur BCD (décimal codé binaire)-7 segments
a- Table de vérité
Manuel de cours
49
Leçon A 2- 2
Chapitre A2
Manuel de cours
Les Circuits Combinatoires
50
Leçon A 2- 2
Chapitre A2
Les Circuits Combinatoires
II- 2- 2- Décodeur BCD/décimal
Exemple d'un décodeur : le circuit spécialisé 74LS42A
II- 2- 3- Réaliser l'activité 2 du manuel d'activités TP A2- 2
II- 2- 4- Réaliser l'activité 3 du manuel d'activités du TP A2- 2
Manuel de cours
51
Leçon A 2- 2
Chapitre A2
Les Circuits Combinatoires
III Exercices à résoudre
Exercice 1
On se propose d’étudier le circuit de commande d’un afficheur 7 segments (circuit
décodeur). Les entrées A, B, C et D sont des boutons poussoirs matérialisant les codes
binaires des chiffres décimaux (0 à 9). Les 7 sorties du décodeur sont reliées aux bornes a ;
b ...., g de l'afficheur 7 segments
1) Etablir la table de vérité décrivant le fonctionnement du décodeur
2) déterminer les équations simplifiées des segments a, b, c, d, e, f et g
3) établir le logigramme de chaque sortie à l'aide des fonctions NAND à deux entées.
Manuel de cours
52
Chapitre A3
Logique Séquentielle
Les Bascules
Leçon A3-1
I - Fonction mémoire
II - Les bascules
III - Exercices d'application
Application à base de Bascules
Leçon A3-2
I II III IV V VI -
Manuel de cours
Mise en situation
Fonction comptage
Compteurs asynchrones
Décompteurs asynchrones
Application à base de bascules
Exercices à résoudre
53
Chapitre A3
FICHE DE PREPARATION
O bjectif du programme
- A partir d'un schéma structurel, identifier les différents types de bascules.
O bjectifs de la leçon
- Identifier un système séquentiel (rappel sur les mémoires).
- Identifier et mettre en oeuvre des bascules RS, RSH, JK, D, T .
P rérequis
- Système combinatoire.
- Mémoire à marche prioritaire.
- Mémoire à arrêt prioritaire.
C onnaissances nouvelles
- Systèmes séquentiels.
- Les bascules RS, RSH, JK et D.
C onditions de réalisation et moyens
- Simulateur logique.
- Micro- ordinateur + logiciels CAO électronique.
C ritères d’évaluation
- Les différentes bascules correctement identifiées.
- Les applications à base de bascules maitrisées.
Manuel de cours
54
Leçon
Leçon A
A 33- 11
Chapitre A3
I
Les Bascules
Fonction mémoire :(Rappels)
I- 1- Définition
Dans un système combinatoire les sorties dépendent uniquement de la combinaison des
variables d'entrée, alors que dans un système séquentiel, l'état des sorties dépend à la fois
des combinaisons des variables d'entrée et de l'état antérieur des sorties (ordre
chronologique des états des entrées).
Une mémoire est un système séquentiel. Elle mémorise continuellement dans le temps la
dérnière information reçue ( soit 1 soit 0 ).
La mémoire est très utilisée dans les calculateurs, les unités de traitement
de l'information, …etc.
I- 2- Symbôle
Fonctionnement
= 1,
=0
la sortie Q = 1 , Q = 0
= 0,
=1
La sortie Q = 0 , Q = 1
I- 3- Différents types
La présence simultanée des deux informations d'enclenchement ( ) et de déclenchement
( ) permet de distinguer quatre types de mémoires:
- mémoire à marche prioritaire ;
* Réaliser l'activité 1 du manuel d'activités TP A3- 1
- mémoire à arrêt prioritaire ;
* Réaliser l'activité 2 du manuel d'activités TP A3- 1
- mémoire à priorité à l'entrée activée la première.
- mémoire à priorité à l'entrée activée la dernière.
Manuel de cours
55
Chapitre A3
II
Leçon
Leçon A
A 33- 11
Les Bascules
Les bascules
II- 1- Généralités
a- Définition
En technologie électronique, une bascule est un système séquentiel dont le circuit de base
est une mémoire.
b- Différents modes de commande
Une bascule est identifiée par son nom et son mode de commande. On distingue :
- les bascules synchrones ;
- les bascules asynchrones.
c- Différents types
Les bascules commercialisées en technologies TTL et CMOS sont :
- bascule asynchrone RS ;
- bascules synchrones RSH, JK et D.
Les bascules synchrones possèdent généralement des entrées de commande asynchrone
nommées SD (Set Direct) et RD (Reset Direct) encore appelées entrées de forçage.
La bascule nommée T est très utilisée dans des circuits appelés diviseurs de fréquences
ou compteurs.
II- 2- Bascule asynchrone RS
II- 2- 1- Réaliser l'activité 3 du manuel d’activités TP A3- 1
II- 2- 2- Définition
La bascule RS est une mémoire bistable commandée par deux entrées (S ; R), elle
possède deux sorties Q et Q . L'entrée S permet la mise à 1 de la sortie Q
(enclenchement:
), R permet sa mise à 0 (déclenchement :
). L'action simultanée
(S = R = 1) donne un état indéterminé.
II- 2- 3- Symbôle
Manuel de cours
56
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
II- 2- 4- Exemple de circuit intégré
Le circuit intégré suivant comporte quatre bascules asynchrones type S R .
a- Schéma de brochage
b- Fonctionnement
S
R
Q
H
H
Q0
L
H
H
H
L
L
L
L
*
* : État instable
H ( High ) état haut : 1
L (Low) état bas : 0
Dans ce circuit intégré les sorties Q ne sont pas accessibles.
II- 2- 5- Etude du circuit d'une bascule RS asynchrone
a- Schéma de brochage
Qn
S
R
Qn+1
0
0
0
0
0
0
1
0
0
1
0
1
0
1
1
1
1
1
0
0
1
1
1
0
1
0
1
1
0
1
-
Commentaire
μ 0 : Mémorisation de 0
μ0 : Mémorisation de 0
ε : Enclenchement
Etat indéterminé
μ1 : Mémorisation de 1
δ : Déclenchement
μ 1 Mémorisation de 1
Etat indéterminé
b- Equations
1) Marche prioritaire
2) Arrêt prioritaire
Tableau de Karnaugh
1
00
0
01
0
1
0
Qn+1= S+R.Qn
Manuel de cours
11
1
1
SR
10
Qn
SR
Qn
0
Tableau de Karnaugh
1
1
0
00
0
01
0
1
1
0
11
10
0
0
1
1
Qn + 1
Qn +1
Qn+1= R(S+Qn)
57
Chapitre A3
Leçon
Leçon A
A 33- 11
Les Bascules
c- Logigrammes
1) A base de C.I. 7400 (ttL)
2) A base de C.I. 7402 (ttL)
d- Chronogramme
1) Marche prioritaire
2) Arrêt prioritaire
R
II-2-6- Application : résolution des problèmes de rebondissement d'un
contact
A chaque action sur un appareil de commande (bouton- poussoir, interrupteur …) apparaît
un rebondissement (genre d'une série d'impulsions pendant quelques millisecondes). Ce
phénomène est nuisible pour les circuits intégrés logiques dont le temps de réponse est de
l'ordre de quelques nanosecondes.
Pour éviter les rebondissements on insère un circuit anti-rebond à base de bascule RS
immédiatement après l'interrupteur de commande, comme le montre la figure suivante :
Montage anti rebond à base d'une bascule R S
Manuel de cours
58
Chapitre A3
Leçon
Leçon A
A 33- 11
Les Bascules
II- 3- Les bascules synchrones
II- 3- 1- Réaliser l'activité 4 du manuel d’activités TP A3- 1
II- 3- 2- Généralités
a- Définition
Le changement d'état d'une sortie d'un système séquentiel synchrone dépend de l'état
des entrées de commande et de celui du signal actif de synchronisation appelé signal
d'horloge.
b- Modes d'action du signal d'horloge
Il existe quatre modes d'actions d'horloge connus par les symboles suivants :
Symbôle
Désignation
Niveau Haut
Niveau Bas
Front descendant
Front montant
II- 3- 3- Bascule synchrone RSH
a- Symboles
Symbole de Bascules à commande par
niveau d'horloge
Bascules à commande par front d'horloge
Bascule synchrone RSH
à niveau haut
Bascule synchrone RSH
à front montant
Bascule synchrone RSH à
niveau bas
et à commade asynchrone
Bascule synchrone RSH
à front descendant
et à commade asynchrone
Bascule synchrone RSH à
niveau bas
et à commade asynchrone
complémentée
Manuel de cours
Bascule synchrone RSH
à front descendant
et à commade asynchrone
complémentée
59
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
b-1- Application :
étudier et mettre en œuvre une bascule RSH à commande par niveau haut
d'horloge
1) Table de vérité
H
Qn
S
0
0
0
0
0
0
0
0
1
0
0
1
0
1
0
0
1
0
0
1
1
0
1
1
1
0
0
1
0
0
1
0
1
1
0
1
1
1
0
1
1
0
1
1
1
1
1
1
2) Tableau de Karnaugh
Qn+1
0
0
0
0
1
1
1
1
0
0
1
1
0
1
-
SR
Qn
R
0
1
0
1
0
1
0
1
0
1
0
1
0
1
0
1
00
00
0
01
0
1
1
0
-
1
10
0
0
-
1
Qn +1
3) Equation
Qn+1= H.Qn + Qn R + HS
5) Table de vérité symbolique simplifiée
Qn+1
1
∅
0
0
1
0
1
1
0
1
1
0
0
∅
0
0
Manuel de cours
1
1
1
Mémoire élémentaire
Qn
1
01
Qn+1= [ Qn ( H R) ] [ H S ]
R
10
0
11
4) Logigramme
S
11
Commentaire
ε : Enclenchement
μ 1 : Mémorisation de 1
δ : Déclenchement
μ 0 : Mémorisation de 0
60
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
6) Diagramme de fluence
7) Chronogramme
II- 3- 4- Bascule synchrone JK
b- Définition
La bascule JK est une mémoire bistable commandée par deux entrées J : (entrée
d’enclenchement ε ) et K : (entrée de déclenchement δ ). A l'action simultanée sur J et K
cette bascule change d'état à chaque front d'horloge.
c- Exemples de bascules
Symboles
Commentaire
Exemple de brochage
Bascule JK synchrone à front
montant
Bascule JK synchrone à front
montant et à commande
asynchrone par SD et RD .
Bascule JK synchrone à front
montant et à commande
asynchrone par RD .
Bascule JK synchrone à front
descendant et à commande
asynchrone par SD et RD .
Manuel de cours
61
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
d- Etude d'une bascule JK à commande par signal d'horloge (H = 1)
1) Table de vérité
J
K
JK
Qn+1
0
0
0
0
0
0
1
0
0
1
0
1
0
1
1
1
1
1
0
0
1
1
1
0
1
0
1
1
1
0
1
0
Qn
Qn
2) Tableau de Karnaugh
1
1
10
00
0
01
0
11
1
1
1
0
0
1
Qn +1
3) Equation
Qn+1 = J Qn + K Qn
4) Equation exprimée avec les opérateurs NAND
Ajoutons à l'équation de Qn+1 le terme Qn Qn , on obtient :
Qn+1= J Qn + K Qn + Qn Qn
Qn+1= J Qn + Qn ( K + Qn)
Qn+1= ( J (Qn )) ( Qn ( K Qn))
5) Table de vérité symbolique simplifiée
J
K
Qn
Qn+1
1
∅
0
1
∅
0
1
1
∅
1
∅
1
0
0
0
0
6) Diagramme de fluence
Commentaire
ε : Enclenchement
μ 1 : Mémorisation de 1
δ : Déclenchement
μ 0 : Mémorisation de 0
7) Exemple d'utilisation
Exemple d’un demi du circuit intégré (74LS76)
Les entrées de commande de la bascule
JK suivante étant au niveau logique 1. En
mode synchrone, la sortie Q change d'état à
chaque front d'horloge. Le chronogramme
suivant illustre le résultat de ce
fonctionnement.
SD : Forçage à 1
RD : Forçage à 0
Manuel de cours
62
Chapitre A3
Leçon
Leçon A
A 33- 11
Les Bascules
8) Chronogramme
II- 3- 5- Bascule synchrone D
a- Réaliser l'activité 6 du manuel d'activités TP A3- 1
b- Définition
La bascule D synchrone est une mémoire bistable commandée par une seule entrée D.
Elle recopie la valeur de D sur Q à chaque front d'horloge.
Symboles
Commentaires
Exemple de Brochage
Bascule D synchrone à
front montant
Bascule D synchrone à
front descendant à
commande asynchrone
par SD et RD .
1) 4013: deux bascules D
Bascule D synchrone à
front montant à
commande asynchrone
par SD et RD.
2) 74LS74 : deux bascules D
Manuel de cours
63
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
c- Etude d'une bascule D à commande par niveau d'horloge
1) Table de vérité
2) Tableau de Karnaugh
D
Qn+1
0
0
0
0
00
0
01
0
11
0
1
10
1
0
0
1
0
1
0
1
1
0
0
1
1
0
0
1
1
0
1
0
1
0
1
1
1
0
1
0
1
0
1
1
1
1
H
Qn
Qn
H
D
Qn +1
3) Equation
Qn+1 = H Qn + HD +D Qn
Qn+1 = [ Qn (H (D D)) ] (H D)
4) Logigramme
5) Table de vérité symbolique simplifiée
D
Qn
Qn+1
1
0
1
1
1
1
0
1
0
0
0
0
Commentaire
ε
μ
δ
μ
: Enclenchement
1 : Mémorisation de 1
: Déclenchement
0 : Mémorisation de 0
d- Chronogramme d'une bascule D type 4013
Manuel de cours
64
6) Diagramme de fluence
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
II- 3- 5- Bascule synchrone T
Cette bascule est commandée par une seule entrée T (timing), elle change d'état à chaque
front d'horloge.
a- Symboles
Bascule T synchrone à
front montant.
Bascule T synchrones à Front descendant à commandes
asynchrones.
b- Table de vérité
c- Tableau de Karnaugh
H
Qn
Qn+1
0
0
1
0
1
0
1
1
0
0
1
1
Qn
H
0
1
0
1
0
1
1
0
e- Logigramme
d- Equation
Qn+1= H Qn + H Qn
Ajoutons Qn Qn à l’équation de Qn+1, on obtient
Qn+1= H Qn + Qn (H + Qn)
Qn+1= [ H (Qn ) ] [ (H Qn) (Qn) ]
g- Diagramme de fluence
f- Table de vérité symbolique
H
Qn Qn+1
Commentaire
1
0
1
: Enclenchement
0
1
1
1 : Mémorisation de 1
1
1
0
: Déclenchement
0
0
0
0 : Mémorisation de 0
Manuel de cours
65
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
III Exercices d’applications
Exercice 1
a. Enoncé : Soit une mémoire à marche prioritaire commandée par m ( ) et a ( )
b. Etablir puis compléter la table de vérité.
c. Trouver l'équation simplifiée de la sortie Qn+1 en utilisant le tableau de Karnaugh .
d. Tracer le schéma à contacts puis le logigramme à base d'opérateurs NAND.
e. Reproduire puis compléter le chronogramme suivant.
Chronogramme
Solution
Table de vérité
m
a
Qn+1
0
0
0
0
0
1
0
0
1
0
1
0
1
1
1
1
0
0
1
1
0
1
0
1
1
0
1
1
1
1
1
Manuel de cours
Tableau de Karnaugh
ma
Qn
Qn
0
0
00
0
01
0
11
1
10
1
1
1
0
1
1
Qn +1
Qn+1 = m + a.Qn
66
Leçon
Leçon A
A 33- 11
Chapitre A3
Les Bascules
Logigramme
Schéma à contacts
Chronogramme
Exercice 2
a. Enoncé : soit une mémoire à arrêt prioritaire commandée par m ( ) et a ( )
b. Etablir puis compléter la table de vérité.
c. Trouver l'équation simplifiée de la sortie Qn+1 en utilisant le tableau de Karnaugh.
d. Tracer le logigramme à base des opérateurs NOR.
e. Reproduire puis compléter le chronogramme suivant.
Chronogramme
Solution
Table de vérité
Manuel de cours
S
0
0
1
1
0
0
1
1
R
0
1
0
1
0
1
0
1
Qn+1
0
0
1
0
1
0
1
0
Qn
Qn
0
0
0
0
1
1
1
1
Tableau de Karnaugh
ma
00
0
01
0
11
0
0
10
1
1
1
0
0
1
Qn +1
Qn+1 = a (m+ Qn)
67
Chapitre A3
Leçon
Leçon A
A 33- 11
Les Bascules
Logigramme
Chronogramme
Manuel de cours
68
Chapitre A3
Leçon A 3- 12
Applications à base de Bascules
FICHE DE PREPARATION
O bjectif du programme
- Analyser le fonctionnement d'un système séquentiel.
O bjectifs de la leçon
- Réaliser et vérifier le fonctionnement des montages de compteurs à
base de bascules en mode asynchrone.
- Réaliser et vérifier le fonctionnement des montages de décompteurs
à base de bascules en mode asynchrone.
- Réaliser et vérifier d'autres montages à base de bascules.
P rérequis
- Systèmes combinatoires.
- Systèmes séquentiels.
C onnaissances nouvelles
- Les compteurs et décompteurs asynchrones à base de bascules.
- Autres applications à base de bascules .
C onditions de réalisation et moyens
- Maquettes de simulation des systèmes séquentiels.
- Micro-ordinateur + logiciels de simulation électronique.
C ritères d’évaluation
- Montage d'un compteur asynchrone et vérification de son
fonctionnement correctement réussis.
- Montage d'un décompteur asynchrone et vérification de son
fonctionnement correctement réussis.
- Des applications à base de bascules réussies.
Manuel de cours
69
Chapitre A3
Leçon A 3- 12
Applications à base de Bascules
COMPTEURS ET DECOMPTEURS ASYNCHRONES
I
Mise en situation
Activité de découverte
Réaliser l'activité de découverte du manuel d'activités TP A3- 2
II Fonction comptage
Dans certains systèmes automatisés, pour gérer la répétition d'un même événement, on
utilise la fonction comptage ou décomptage.
II- 1- Principe
La fonction comptage ou décomptage est réalisée par un circuit séquentiel permettant :
- La modification du mot binaire en sortie chaque fois qu'une information est appliquée à
l'entrée.
- La mémorisation de l'état de sortie
Q0
Information
Système Séquentiel
à compter
Q1
Qn
Les éléments de base d'un compteur sont des bascules montées en cascade.
II- 2- Modulo d'un compteur
Un compteur modulo N est constitué d'un nombre (n) de bascules. Il compte de 0 jusqu'à
(N - 1). Il comporte N combinaisons de valeurs binaires des variables de sorties Qi de ces
bascules. Le nombre de bascules (n) est donné par la relation suivante :
( n- 1)
2
(n)
< N < 2
II- 3- Différents types de compteurs
Il existe deux types de compteurs :
- compteurs asynchrones;
- compteurs synchrones.
Manuel de cours
70
Leçon A 3- 12
Chapitre A3
Applications à base de Bascules
III Compteurs asynchrones
III- 1- Compteurs asynchrones à base de bascules
III- 1- 1- Principe
Un compteur asynchrone est un circuit logique composé de n bascules T (ou ses
équivalentes) où l'information à compter est reliée à l'entrée d'horloge de la première bascule.
Pour les autres bascules :
- si le front est descendant alors la sortie (Q) de la première bascule est reliée à l'entrée
d'horloge de la bascule suivante et ainsi de suite ;
- si le front est montant alors la sortie (Q ) de la première bascule est reliée à l'entrée
d'horloge de la bascule suivante et ainsi de suite.
III- 1- 2- Compteurs asynchrones à base de bascules sans entrées de
forçages
Exemple : compteur asynchrone modulo 8 à base de bascules JK
a- Branchement d'une bascule JK en bascule T
Si les entrées J et K sont reliées à +VCC
alors la bascule ainsi obtenue est la
bascule T
b- Caractéristiques
- Type : JK à front descendant et à commande asynchrone par R ( CLR : Clear)
- Nombre de bascules : il y a 8 combinaisons soit 8 = 23 on utilise alors trois bascules qu'on
nommera Q0 , Q1 et Q2
- Equations des entrées d'horloge : H0 = H et Hi = Qi - 1
c- Schéma de câblage
Remarque : les sorties Q des bascules du montage restent non connectées.
Manuel de cours
71
Chapitre A3
Leçon A 3- 12
Applications à base de Bascules
d- Chronogramme
.................................................................................................................................................................
.................................................................................................................................................................
.................................................................................................................................................................
.................................................................................................................................................................
e- Table de comptage
Décimal
0
1
2
3
4
5
6
7
H
Q2
0
0
0
0
1
1
1
1
Q1
0
0
1
1
0
0
1
1
Q0
0
1
0
1
0
1
0
1
III Décompteurs asynchrones
IV- 1- Principe
Dans les décompteurs asynchrones l'information à décompter est reliée à l'entrée d'horloge
de la première bascule. Pour les autres bascules :
- si le front est descendant alors la sortie (Q) de la première bascule est reliée à
l'entrée d'horloge de la bascule suivante et ainsi de suite.
- si le front est montant alors la sortie (Q) de la première bascule est reliée à l'entrée
d'horloge de la bascule suivante et ainsi de suite.
IV- 2- Décompteurs asynchrones à base de bascules :
IV- 2- 1- Décompteurs de cycle usuel (Modulo N = 2n)
Exemple : décompteur asynchrone modulo 8 (N = 8) à base de bascules JK.
Manuel de cours
72
Chapitre A3
Leçon A 3- 12
Applications à base de Bascules
a- Caractéristiques
- Bascule : JK à front descendant ( ) et à commande asynchrone par R
- Référence : 74 LS 73
- Nombre de bascules: 8 = 23 , on utilise trois bascules qu'on nommera Q0 , Q1 et Q2
Equations des entrées d'horloge : H0 = H et Hi = Qi- 1
b- Schéma de câblage du décompteur modulo 8
c- Réaliser l'activité 1 du manuel d'activités TP A3- 2.
d- Chronogramme
e- Table de comptage
décimal
7
6
5
4
3
2
1
0
Manuel de cours
H
Q2
1
1
1
1
0
0
0
0
Q1
1
1
0
0
1
1
0
0
73
Q0
1
0
1
0
1
0
1
0
Chapitre A3
V
Leçon A
A 33- 12
Leçon
Applications à base de Bascules
Leçon A 3- 2
Applications
base de
Bascules
Application
à base de àbascules
: chenillard
Le chenillard est une guirlande d'ampoules dont l’allumage donne l'impression de voir la
lumière se propager d'une lampe à l'autre grâce à des séries bien calculées d'allumage et
d'extinction. Un chenillard peut comporter plusieurs dizaines de lampes, mais son principe de
base repose sur une séquence répétée plusieurs fois. Le schéma suivant illustre un exemple
de réalisation mettant en oeuvre un chenillard à quatre L.E.D.
Manuel de cours
74
Chapitre A3
Leçon A 3- 12
Applications à base de Bascules
VI Exercices à résoudre
Exercice 1
a. Reproduire le schéma suivant :
b. Quel est le type du front d'horloge des bascules figurées ci-dessus ?
c. On désire réaliser le circuit d'un compteur asynchrone avec ces quatre bascules, déduire
son modulo.
d. Compléter le schéma de câblage, déjà tracé, permettant d'obtenir un compteur asynchrone
modulo 16.
Exercice 2
a. Reproduire le schéma suivant :
b.Compléter le schéma de câblage, déjà tracé, permettant d'obtenir un décompteur
asynchrone modulo 8.
Exercice 3
A la sortie d'une chaîne de conditionnement d'un produit alimentaire, des boîtes, détectées
par un capteur infrarouge, sont regroupées par lot de 16. Le signal d'horloge (information
délivrée par ce capteur) est appliqué à un compteur asynchrone dont le schéma de câblage
est l'objet de notre étude.
On donne le schéma de brochage du circuit intégré 74LS109E :
Manuel de cours
75
Leçon A 3- 12
Chapitre A3
Applications à base de Bascules
a. Représenter le symbôle de la bascule
utilisée puis donner son nom
b. Compléter la table de vérité suivante,
correspondant au fonctionnement de la
bascule du circuit figuré ci- contre puis
identifier les combinaisons permettant le
mode synchrone.
Mode
H
J
K
S
R
Qn
1
1
0
0
1
1
1
1
1
1
1
1
1
0
1
0
1
1
0
1
0
0
1
1
0
1
Qn+1
Remarque
c. Dans chaque bascule, on relie l'entrée K
complémentée à l'entrée J ; quelle est
alors la fonction réalisée par celle-ci ?
d. On donne le schéma de brochage du
circuit intégré dont la référence est à
découvrir :
d.1- A partir du schéma de brochage ci-dessus retrouver la référence du circuit sur le
mémotech.
d.2- Tracer le schéma de câblage d'un compteur modulo 16 en utilisant des circuits intégrés
74LS112.
d.3- Tracer le schéma de câblage d'un compteur modulo 16 en utilisant les circuits intégrés
de la question (d).
Manuel de cours
76
Chapitre A3
Logique séquentielle (suite)
Grafcet
Leçon A3- 3
I II III IV V -
Leçon A3- 4
Mise en situation
GRAFCET à séquence unique
GRAFCET séquences multiples
Exercices résolus
Exercices à résoudre.
Séquenceurs
I - Mise en situation
II - Les séquenceurs pneumatiques
III - Les séquenceurs électroniques
IV - Exercices résolus
V - Exercices à résoudre.
Manuel de cours
77
Leçon A 3- 13
Chapitre A3
Le Grafcet
FICHE DE PREPARATION
O bjectif du programme
- Décrire, par un GRAFCET, le fonctionnement d'un système automatisé.
O bjectifs de la leçon
- Rappeler les règles d'évolution d'un GRAFCET.
- Identifier les différentes structures d'un GRAFCET.
- Décrire par un GRAFCET le fonctionnement d'un système automatisé.
P rérequis
- systèmes séquentiels.
- Modélisation d'un système séquentiel.
- Les règles d'évolution d'un GRAFCET.
C onnaissance nouvelle
- Les différentes structures d'un GRAFCET.
C onditions de réalisation et moyens
-
Micro - ordinateur + logiciels de simulation électronique .
Simulateur logique.
Maquette appropriée.
Didacticiel approprié.
C ritères d’évaluation
- Régles d'évolution d'un GRAFCET rappelées
- Identification correcte des structures d'un GRAFCET.
- Description correcte d'un systéme automatisé par un GRAFCET.
Manuel de cours
78
Leçon A 3- 13
Chapitre A3
I
Le Grafcet
GRAFCET à séquence unique : rappel
I- 1- Description d'un système automatisé
Un système est dit automatisé, s'il exécute toujours le même cycle de travail conçu sans
l'intervention de l'opérateur.
a- Partie Commande
La partie commande est en général composée d'éléments de traitement de l'information,
notamment, d'automate programmable et d'ordinateur.
Elle transmet les ordres aux actionneurs à partir :
- du programme qu'elle contient ;
- des informations reçues par les capteurs ;
- des consignes données par l'utilisateur ou par l'opérateur.
b- Partie Opérative
La partie opérative nécessite pour son fonctionnement de l'énergie électrique ou
pneumatique (air comprimé) ou hydraulique (huile sous pression).
Elle comporte en général :
- des actionneurs qui transforment l'énergie reçue en énergie utile : moteur, vérin,
lampe... ;
- des capteurs qui transforment en grandeurs logiques , analogiques ou numériques les
variations des grandeurs physiques lieés aux effecteurs ou actionneurs du système.
- des effecteurs qui agissent sur la matière d'œuvre d'entrée pour lui conférer la valeur
ajoutée désirée. Les différentes parties sont organisées conformement à la structure
suivante :
Manuel de cours
79
Leçon A 3- 31
Chapitre A3
Le Grafcet
I- 2- Activité 1
Réaliser l'activité 1 du manuel d'activités TP A3- 3
I- 3- Exemple : unité de perçage
I- 3- 1- Présentation
la figure suivante représente une unité de perçage.
S
P
I- 3- 2- Description du fonctionnement
L'opérateur place une pièce P à percer sur l'étau de serrage. L'action sur un bouton
poussoir (S) met en marche l’unité de perçage. Le cycle de fonctionnement est le suivant :
- serrer la pièce ;
- percer la pièce ;
- desserrer la pièce.
N.B : la pièce est dégagée manuellement.
Manuel de cours
80
Leçon A 3- 13
Chapitre A3
Le Grafcet
Table des affectations
Mouvements
Actionneurs
Préactionneurs
Capteurs
Montée
Descente
Serrage
RC2
SC2
SC1
12M2
14M2
14M1
l20
Desserrage
RC1
M
12M1
KM
Rotation foret
l21
l11
l10
I- 3-3- Conclusion
Un GRAFCET à séquence unique est un GRAFCET linéaire composé d'une succession
d'étapes et de transitions où les étapes sont actionnées l'une après l'autre.
II GRAFCET à séquences multiples
II- 1- Mise en situation
Réaliser l'activité 2 du manuel d'activités TP A3- 3.
II- 2- Différents types
Dans le GRAFCET à séquences multiples on distingue :
- GRAFCET à sélection de séquences ;
- GRAFCET à séquences simultanées.
II- 3- GRAFCET à sélection de séquences
Un GRAFCET est dit à sélection de séquences si à partir d'une étape donnée plusieurs
évolutions sont possibles. On distingue :
- séquences exclusives ;
- reprise de séquence ;
- saut d'étapes.
II- 3- 1- Divergence en OU (Aiguillage)
On dit qu'il y'a une divergence en OU, si à partir d'une étape d'un grafcet, le choix exclusif
d'une des séquences s'opère lorsque la récéptivité correspondante est vraie comme le
montre la figure suivante.
Manuel de cours
81
Chapitre A3
Leçon A 3- 31
Le Grafcet
II- 3- 2- Convergence en OU
On dit qu'il y a convergence en OU lorsque plusieurs séquences du GRAFCET convergent
vers une même étape.
a- Activité
Réaliser l'activité 2 du manuel d'activités TP A3- 3.
Manuel de cours
82
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
b- Application : Commande d'un wagonnet
Le wagonnet figuré ci-contre est utilsé pour amener des
sacs de ciment entre le poste A de production et le poste B de
stockage détectés respectivement par les capteur a et b.
Ce wagonnet est entrainé par un moteur électrique M à
deux sens de rotation avant (AV) ou arrière (AR).
Fonctionnement
Le wagonnet étant en poste A. L'action sur le bouton de
départ cycle (m) commande le moteur M. Le wagonnet se
déplace en avant jusqu'au poste B.
Dès que sur le capteur (b) est actionné, selon la position du
sélecteur (S) à deux positions on a :
• Si S = 1 le wagonnet ne revient vers A après une durée
de 4 s ;
• Si S = 0 Le wagonnet ne revient vers A que si on
actionne le bouton (r).
2) Identification des éléments PO / PC
Mouvements
Sens avant
Sens arrière
Actionneur
Préactionneur
Capteur
MtAV
MtAR
KM1
KM2
b
a
3) description : les GRAFCET PO et PC suivants décrivent le fonctionnement du
système figuré ci-dessus.
Manuel de cours
83
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
II- 3- 3- Reprise de séquences
Réaliser l'activité 3A (ou 3B) du manuel d'activités TP A3- 3 en fonction du matériel
disponible au laboratoire.
a- Exemple : transfert de pièces dans une chaîne de production
1) Présentation
Le système figuré ci-contre permet de
transférer un lot de 5 pièces (l’une après
l’autre) du tapis d’arrivée vers le tapis
d’évacuation. L’opération de transfert est
assurée par les deux vérins C1 et C2 à double
effet commandés respectivement par les deux
distributeurs M1 et M2 du type (5/2).
2) Fonctionnement
Le tapis d’arrivée amène une pièce devant le vérin C1.
Dès que celle-ci se présente sur le banc de transfert, elle est détectée par le capteur S1.
L’action sur le bouton poussoir m permet de :
a- transférer la pièce jusqu’au capteur S3 grâce à la sortie puis la rentrée de la tige de C1;
b- transférer la pièce jusqu’au tapis d’évacuation à la sortie puis la rentrée de la tige du
vérin C2.
• Le cycle reprend dès qu’une nouvelle pièce se présente devant C1 (S1 = 1). Il s’arrête après
e
le 5 transfert.
Le système reprend le même cycle tant que le nombre de pièces transférées est inférieur à 5
N.B : On désigne par N une variable logique associée au nombre de pièces n telle que si
n < 5 on a N = 0 et si n = 5 on a N = 1.
Manuel de cours
84
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
Le saut d'étapes est une divergence en OU particulière. Une condition (réceptivité) permet
de sauter une ou plusieurs étapes lorsque les actions associées à ces étapes ne sont pas
demandées.
Exemple : Unité de perçage
1) Présentation
Le système figuré ci-dessous permet de percer des pièces.
Le vérin C, commandé par le distibuteur M du type (5/2), est
à double effet, il permet le serrage de la pièce à percer. Le
foret est en rotation par le moteur MB et en translation par le
moteur MA. Le moteur MA est à deux vitesses (rapide ou
lente).
Cette machine permet, suite à une commande appropriée,
d’obtenir : un cycle de perçage avec débourrage ou un cycle
de perçage sans débourrage.
Selon la position du sélecteur SD on a :
• Si S0 = 0 ,le perçage est réalisé avec débourrage ;
• Si S0 =1 , le perçage est réalisé sans débourrage ;
2) Fonctionnement
Cycle sans débourrage :
- approche rapide du foret jusqu'à S2 ;
- approche lente pour perçage jusqu'à S4 ;
- montée rapide jusqu'à S1.
Cycle avec débourrage :
- approche rapide du foret jusqu'à S2 ;
- descente lente jusqu'à S3 ;
- montée rapide jusqu'à S2 ;
- descente rapide jusqu'à S3 ;
- descente lente jusqu'à S4 ;
- montée rapide jusqu'à S1.
3) Variables d'entrée et de sortie
- S1, S2, S3 et S4 : sont des capteurs contrôlant la position
-
du foret.
S5 et S6 : sont deux capteurs de position contrôlant le
serrage et le desserrage de la pièce.
S7 : capteur contrôlant la présence pièce.
sélecteur permet le choix du cycle :
S0 : Cycle avec débourrage
S0: Cycle sans débourrage
MB : Moteur broche commandé par un contacteur KMB
Manuel de cours
85
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
MA : Moteur à deux sens de rotation et deux vitesses commandés par :
*
*
*
KMDR : descente rapide ;
KMDL : descente lente ;
KMMR : montée rapide.
4) Grafcet PC
Tableau des préactionneurs
Action
Serragee pièce
14 M
Rotation broche
KMB
Descente rapide
KMDR
Descente lente
KMDL
Montée rapide
KMMR
Montée lente
KMML
Desserrage pièce
Manuel de cours
86
Préactionneur
12 M
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
II- 3- 5- Séquences simultanées (convergence, divergence en ET)
Dans un cycle à sequences simultanées, les séquences débutent en même temps, mais
les étapes de chaque séquence evoluent d'une façon independante. La convergence n'aura
lieu que lorsque les différentes séquences ont été accomplies séparament. Cet type de cycle
est surtout utilisé sur des systèmes de transfert ou des systèmes comportant plusieurs sous
systèmes travaillant d'une manière independante
Exemple : Aller et retour de deux chariots
L'action sur le bouton S0 provoque le déplacement de deux chariots C1 et C2
respectivement de S1 à S2 et de S3 à S4. Le retour du chariot C2 ne peut se faire qu'après
le retour du chariot C1 à sa position initiale. Le chariot C1 est entraîné par un moteur M1
commandé par deux contacteurs KM1 (sens avant) et KM2 (sens arrière) et le chariot C2 est
entraîné par un moteur M2 commandé par deux contacteurs KM3 (sens avant) et KM4 (sens
arrière).
Manuel de cours
87
Chapitre A3
Mouvements
Leçon A
A 33- 13
Leçon
Le Grafcet
Actionneurs
Préactionneurs
Capteurs
KM1
Fin de déplacement
avant : S2
Déplacement arrière
de C1
KM2
Fin de déplacement
arrière : S1
Déplacement avant
de C2
KM3
Fin de déplacement
avant : S4
KM 4
Fin de déplacement
arrière : S3
Déplacement avant
de C1
M1
M2
Déplacement arrière
de C2
11
12
4
Manuel de cours
88
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
II- 4- MISE EN ÉQUATION D’UNE ÉTAPE D’UN GRAFCET,
1) Règle générale
Pour qu'une étape soit activée, il faut que :
- l'étape immédiatement précédente soit active ;
- la réceptivité immédiatement précédente soit vraie;
- l'étape immédiatement suivante soit non active ;
- après activation, l'étape mémorise son état.
-
Considérons l'étape n :
Equation d'activation :
An =Xn- 1. Rn
Equation de désactivation :
Dn =Xn+1
Equation de l'étape : Xn = ( Xn-1. Rn +mn) Xn+1
Xn : équation d'activation de l'étape de rang n
Xn-1 : l'étape (n- 1) est active.
Rn: réceptivité Rn est vraie.
mn : mémorisation de l'étape n
Xn+1 : l'étape (n+1) est non active
2) Différents cas de mise en équation
a-
-
Considérons l'étape 2 :
A2 =X1.R2
Equation de désactivation :
D2 =X10+X20
Equation d'activation :
Equation de l'étape : X2 = (X1.R2 + m2) (X10+X20)
Manuel de cours
-
Considérons l'étape 10 :
Equation d'activation :
A10 =X2.R10
Equation de désactivation :
D10 =X11
Equation de l'étape : X10 = ( X2.R10 +m10) (X11)
-
Considérons l'étape 20 :
Equation d'activation :
A20 =X2.R20
Equation de désactivation :
D20 = X21
Equation de l'étape : X20 = (X2.R20 +m20) (X21)
89
Chapitre A3
Leçon A
A 33- 14
Leçon
Les Séquenceurs
b- Considérons l'étape 16:
Equation d'activation :
A16 =X15.R16
Equation de désactivation :
D6 =X7
Equation de l'étape : X16 = (X15.R16 + m16) X7
- Considérons l'étape 26:
Equation d'activation :
A26 =X25.R26
Equation de désactivation :
D26 =X7
Equation de l'étape : X26 = (X25.R26 +m26) X7
- Considérons l'étape 7 :
Equation d'activation :
A7 = X16.R17+ X26.R27
Equation de désactivation :
D7 = X8
Equation de l'étape:X7=(X16.R17+ X26.R27+m7)X8
c-
Considérons l'étape 7 :
Equation d'activation : A7 =X6.R7
Equation de désactivation :
D7 =X10.X20
-
Equation de l'étape : X7 = (X6.R7 + m7) (X10.X20)
Considérons l'étape 10 :
Equation d'activation :
A10 =X7.R8
Equation de désactivation :
-
D10 =X11
Equation de l'étape : X10 = (X7. R8 +m10) (X11)
Considérons l'étape 20 :
A20 =X7.R8
Equation de désactivation :
D20 = X21
Equation d'activation :
Equation de l'étape : X20 = (X7.R8+m20) (X21)
Manuel de cours
90
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
d-
-
Considérons l'étape 11 :
Equation d'activation :
A11 =X10.R11
Equation de désactivation :
D11 =X6
Equation de l'étape : X11 = (X10.R11+ m11) X6
-
Considérons l'étape 21:
Equation d'activation :
A21 =X20. R21
Equation de désactivation :
D21 =X6
Equation de l'étape : X21 = (X20. R21+m21) X6
-
Considérons l'étape 6 :
Equation d'activation :
A6 = (X11 X21). R7
Equation de désactivation :
D6 = X7
Equation de l'étape : X6 = ((X11 X21). R7+ m6) X7
III Exercices résolus
Exercice 1: système de décapage par immersion
Mise en situation
Le système, figuré ci-après, permet de nettoyer des pièces dans un liquide décapant
avant peinture.
Constitution du système
Le système est constitué d' :
- un automate programmable et un pupitre de commande ;
- une unité de déplacement vertical et horizontal de la pièce métallique ;
- une cuve contenant un liquide "décapant."
Manuel de cours
91
Chapitre A3
Leçon A 3- 13
Le Grafcet
Fonctionnement
L'action sur le bouton de départ cycle S0 au niveau du pupitre provoque dans l'ordre :
a. Le transfert de la pièce à décaper
- La montée de la pièce à décaper : mouvement vertical animé par le moteur M1
commandé par le contacteur KM11 jusqu'à l'action sur le capteur S2.
- Le déplacement de la pièce à décaper vers la droite : mouvement horizontal animé par
le moteur M2 commandé par le contacteur KM21 jusqu'à l'action sur le capteur S4.
- La descente de la pièce à décaper : mouvement vertical animé par le moteur M1
commandé par le contacteur KM12 jusqu'à l'action sur le capteur S1.
b. L'immersion de la pièce dans la cuve du produit décapant pendant un temps de 5mn
controlé par un temporisateur T.
c. Le transfert de la pièce décapée dans l'ordre suivant :
- La montée de la pièce décapée : mouvement vertical animé par le moteur M1
commandé par le contacteur KM11 jusqu'à l'action sur le capteur S2.
- Le déplacement de la pièce décapée vers la droite : mouvement horizontal animé par
le moteur M2 commandé par le contacteur KM21 jusqu'à l'action sur le capteur S5.
- La descente de la pièce décapée : mouvement vertical animé par le moteur M1
commandé par le contacteur KM12 jusqu'à l'action sur le capteur S1.
d. L’attente pour décharger la pièce décapée.
Après déchargement l'opérateur actionne un bouton poussoir S6 pour remettre le
système à sa position initiale (le mouvement horizontal vers la gauche est assuré par le
moteur M2 commandé par le contacteur KM22).
N.B. : Le chargement et le déchargement de la pièce est manuel.
Manuel de cours
92
Chapitre A3
Leçon A 3- 3
Le Grafcet
Leçon A 3- 3
Mouvements
LE GRAFCET
Préactionneurs
Actionneurs
Déplacement de la pièce
vers la droite
Capteurs
KM21
S4 ; S5
Déplacement de la pièce
vers la gauche
KM22
S3
Montée de la pièce
KM11
S2
KM12
S1
M2
M1
Descente de la pièce
Travail demandé :
tracer les GRAFCETS selon les deux points de vue
Solution :
Manuel de cours
93
Chapitre A3
Leçon A 3- 3
Le Grafcet
Exercice 2: Système d'usinage des pièces.
a- description
Le système figuré ci-dessous permet
d’usiner soit des pièces cylindriques, soit des
pièces coniques. Il est composé de trois
moteurs :
M : rotation de la pièce à usiner (rotation
continue) ;
M1 : déplacement transversal de l’outil ;
M2 : déplacement longitudinal de l’outil.
b- fonctionnement
Un appui sur S2 provoque la réalisation
des pièces coniques (cycle triangulaire).
Un appui sur S1 provoque la réalisation
des pièces cylindriques (cycle carré).
Si S1 = S2 = 1, on donne la priorité au cycle carré.
Solution :
Travail demandé :
tracer le GRAFCET PC
Manuel de cours
94
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
Leçon A 3- 3
LE GRAFCET
IV Exercices à résoudre
Exercice 1: système automatique de dosage et de chauffage d'un liquide
a- Présentation
Dans une usine de produits agro- alimentaires une partie du processus de traitement d'un
produit consiste à doser une quantité d'un liquide visqueux pour la porter à une température
de 100°C. Ce système comporte :
- un bac de dosage A ;
- une citerne de chauffage B.
b- Fonctionnement
Suite à une action sur le bouton poussoir de mise en marche S, le cycle commence comme
suit :
- dosage du liquide : l'électrovanne KA1 autorise le remplissage du bac de dosage A jusqu'à
la détection de la quantité souhaitée par le capteur P1 ;
Lorsque P1 est actionné, KA1 interrompt le remplissage et autorise l'écoulement du liquide
du bac de dosage A vers la citerne de chauffage B par l'électrovanne KA2.
La fin de l'écoulement détectée par le capteur Po entraîne à la fois :
- le chauffage du liquide par le résistor Rc ;
- le brassage du liquide par la rotation des hélices entraînées par le moteur M commandé
par le contacteur KM.
La température de chauffage est contrôlée par le capteur S1. Lorsque la température de
100°C est atteinte, le chauffage et le brassage sont arrêtés. La circulation du liquide vers la
suite du processus est autorisée par KA3 pendant un temps de 20s contrôlé par un
temporisateur T.
Manuel de cours
95
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
c- Travail demandé
- Etablir le GRAFCET d'un point de vue du système.
- Etablir les GRAFCET(s) d'un point de vue de la partie opérative PO et d'un point de vue
de la partie commande PC du système.
Exercice 2: poste automatique de pliage
a- Description
Le système ci- dessous, permet de plier automatiquement des pièces en tôles. Il est
constitué d'un :
- dispositif de transfert (tapis roulante) ;
- dispositif de pliage (poinçon + matrice) ;
- dispositif d'évacuation (matrice).
b- Fonctionnement
Un appui sur le bouton poussoir départ cycle S0 provoque :
- transférer la pièce en tôle jusqu'au capteur S1 ;
- plier la pièce ;
- évacuer la pièce déjà pliée.
Manuel de cours
96
Chapitre A3
Leçon A
A 33- 13
Leçon
Le Grafcet
c- Travail demandé
En se référant à la figure précédent. identifier les entrées et les sorties dans une table
d'affectation.
- Etablir le GRAFCET d'un point de vue du système.
- Etablir les GRAFCET(s) d'un point de vue de la partie opérative PO et d'un point de vue
de la partie commande PC du système.
Exercice 3 : Trémie doseuse
a- Présentation
Une trémie doseuse est utilisés pour remplir des boîtes par des doses de poudre.
b- Fonctionnement
La présence d'une boîte vide sous la trémie est détectée par le capteur S (capteur sans
contact).
l'action sur le bouton départ cycle permet de :
• Fermer le doseur ;
• Remplir le doseur (cette opération dure 10 secondes après l'ouveture totale de la tremie) ;
• Remplir la boite ;
• Dégager manuellement la boite déjà remplie.
Remarque : le déplacement des boites par le tapis roulant ne fait pas l'objet de notre étude.
c- Travail demandé
identifier les entrées et les sorties de ce système
- Etablir le GRAFCET d'un point de vue du système.
- Etablir les GRAFCET d'un point de vue de la partie opérative PO et d'un point de vue
de la partie commande PC du système.
Manuel de cours
97
Leçon A 3- 31
Chapitre A3
Le Grafcet
Exemples de composants technologiques usuels
Capteurs
Capteur de proximité à ultrasons
Capteur d’humidité
Détecteur de choc
Capteur de niveau de liquide
Cellule photoélectrique
Interrupteur miniature
Bouton
Détecteur de gaz
Bouton d’arrêt d’urgence
Actionneurs
Moteur pas à pas
Electrovanne
Buzzer
Manuel de cours
Afficheur 7 segments
Voyants
Vérin rotatif
Ventilateur
Vérin
Résistance chauffante
98
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
FICHE DE PREPARATION
O bjectif du programme
- Implanter et mettre en œuvre un GRAFCET sur séquenceur.
O bjectifs de la leçon
- Implanter et mettre en œuvre un GRAFCET sur séquenceur pneumatique et/ou
électronique.
P rérequis
- Les systèmes séquentiels
- Les règles d'évolutions d'un GRAFCET.
C onnaissances nouvelles
- Implantation et mise en œuvre des séquenceurs pneumatiques et électroniques.
C onditions de réalisation et moyens
- Bras manipulateur et/ ou systèmes de Tri.
- Séquenceurs pneumatiques et électroniques.
- Maquette à commande électropneumatique.
C ritères d’évaluation
- Implantation correcte d'un GRAFCET sur séquenceur pneumatique et/ou
électronique.
Manuel de cours
99
Chapitre A3
I
Leçon A 3- 14
Les Séquenceurs
Mise en situation
1) Activité de découverte
Réaliser l'activité de découverte du manuel d'activités TP A3- 4.
2) Définition
En cascade de modules étapes qui commande une suite d’évènement structurées par un
GRAFCET. Chaque module matérialise une étape.
Les séquenceurs sont à technologie pneumatiques, électromagnétiques, électroniques.
Dans ce qui suit, on s’intresse au sequenceurs pneumatiques et séquenceurs
électroniques.
3) Module étape
Un module étape est constitué :
- d'un module d’activation ;
- d'un module de désactivation ;
- d'une mémoire.
Demande
d’activation
Demande
de désactivation
3- 1- Module d'activation
Pour qu'une étape soit active il faut que :
- l'étape (ou les étapes) immédiatement
précédente (s) soit (soient) active(s)
&
- la (les) réceptivité (s) immédiatement
précédente (s) soit (soient) vraie (s).
Manuel de cours
AE : Activation étape
EP : Etapes précédentes
RP : Réceptivité précédente
100
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
3- 2- Module de désactivation
Pour désactiver une étape il faut que :
- l'étape (ou les étapes) immédiatement
suivante (s) soit (soient) active(s) ;
OU
- l'ordre de désactivation (remise à zéro
RAZ) soit demandé.
DE : Désactivation étape
EP : Etapes suivante
RP : Ordre de désactivation
3- 3- Mémoire
La fonction mémoire est matérialisée
par deux entrées (A : activation et D :
désactivation)
et
deux
sorties
complémentaires S et S
3- 4- Module étape
a- Structure
L'association des trois fonctions précédentes forme le module étape suivant :
Alimentation
en énergie
Signal permanent du
module (n-1)
Sortie du module n
Vers cellule ET du module
(n+1)
RAZ
Désactivation du module (n)
Vers le
Lorsque le module (n+1) est
active
déclencement
du module (n-1)
Module n
Réceptivité
associée
au module (n)
Manuel de cours
101
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
Commande manuelle
d’étape
Commande de
mouvements
Voyant d’étape
Repérage d’étape
Connexions
automatiques
entre modules
d’étape
Signal
de retour
b- Symboles :
Technologie électronique
Technologie pneumatique
II Séquenceurs pneumatiques
1) Exemple
Commande d'un vérin double effet (cycle va et vient)
Manuel de cours
Manuel
cours
102
Leçon A 3- 14
Chapitre A3
Les Séquenceurs
2) Schéma de câblage d'un séquenceur pneumatique
- Remplacer chaque étape du GRAFCET par un module étape.
- Réaliser les connexions de tous les modules étapes en respectant les règles d'évolution.
Module d’étape
Mémoire
Embase
associable
Réceptivité
(orifice vert)
Vers préactionneur
pneumatique
(orifice rouge)
Module étape (vue de dessus)
Entrée des informations
(réceptivités)
Bloc d’entrée
(pression)
Manuel de cours
Manuel
cours
103
Vue de dessus
du séquenceur
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
Chaque fabriquant (CROUZET, TELEMECANIQUE CLIMAX...) a réalisé des éléments
associables permettant de réaliser des séquenceurs et de simplifier les câblages.
Fonctionnement
La mémoire d'un module étape est validée par le signal provenant du module étape
précédent.
La sortie de cette mémoire provoque alors trois actions :
- la sortie du signal S vers le distributeur de commande de l'actionneur ;
- la remise à zéro du module précédent ;
- la validation du module suivant.
Exemple 1
1
2
3
4
5
6
7
8
:
:
:
:
:
:
:
:
Validation de l’étape n
Activation de l’étape n
Désactivation étape n-1
Condition de transition
Désactiivation de l’étape n
Activation étape n+1
Validation étape n+1
Signal de commande de la sortie
Exemple 1
A0 : entrée d'enclenchement du module n
B0 : sortie de déclenchement du module (n- 1)
A1 : sortie d'enclenchement du module (n+1)
B1 : entrée de déclenchement du module n
S : sortie de commande du mouvement.
r : retour du signal en fin de mouvement.
(réceptivité)
p : pression constante.
Raz : remise à zéro.
Manuel de cours
104
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
Règle
On affecte un module étape à chaque étape du GRAFCET dont :
- l'entrée du module étape reçoit la condition de transition ;
- la sortie du module d'étape fournit le signal de commande à réaliser.
Exemple d'association des modules étapes
Activité
Réaliser les activités 2 et 3 du manuel d'activités TP A 3-4
Manuel de cours
105
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
III Séquenceurs éléctroniques
Exemple : BARRIERE AUTOMATIQUE
Le fonctionnement de la barrière est
décrit par un GRAFCET d’un point de
vue de la partie commande
Manuel de cours
106
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
Schéma de câblage sur séquenceur électronique
Manuel de cours
107
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
IV Exercices résolus
Exercice 1
Description du système
Le système suivant décrit à la page 84 permet de transférer une seule pièce au lieu de 5
pièces.
Manuel de cours
108
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
GRAFCET PC
SÉQUENCEUR PNEUMATIQUE
N.B :
En technologie pneumatique la porte ET à 4 entrées est remplacée par 3 portes ET à 2
entrées.
Manuel de cours
109
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
Exercice 2
1) Fonctionnement
L'appui sur le bouton de départ cycle S0
entraîne :
- descente rapide jusqu'à S2 ;
- descente lente jusqu'à S3 ;
- montée rapide jusqu'à S1.
Le fonctionnement du foret ne fait pas
partie de l'étude.
KM1 : contacteur pour la descente rapide
KM2 : contacteur pour la descente lente
KM3 : contacteur pour la montée rapide.
Symbole d'un module étape électronique
2) Travail demandé : implanter le GRAFCET figuré ci-dessus sur le séquenceur
éléctronique suivant.
Solution : séquenceur électronique
Manuel de
Manuel
decours
cours
vers les préactionneurs.
110
Chapitre A3
V
Leçon A 3- 14
Les Séquenceurs
Exercices à résoudre
Exercice 1: trémie doseuse
1) Présentation
Une trémie doseuse est destinée à doser puis charger les produits en poudre dans des
boites.
2) Fonctionnement
Le système est au repos, la présence d'une boite vide sous la trémie est détectée par un
capteur S (détecteur photo- électrique) , ce qui provoque le départ du cycle pour préparer une
dose du produit de la manière suivante :
- le clapet 2 avance pour fermer le doseur par le vérin C2 (vérin pneumatique à double effet)
commandé par le distributeur M2.
- le clapet 1 recule pour laisser écouler le produit dans le doseur durant 10 s par le vérin C1
(vérin pneumatique à double effet) commandé par le distributeur M1 puis avance pour
fermer de nouveau la trémie.
- lorsque la dose est prête, le clapet 2 recule et libère le produit qui descend par gravité dans
la boite et le système revient au repos.
Remarque : Le déplacement des boites par le tapis roulant ne fait pas l'objet de l'étude.
3) Travail demandé
Etablir le GRAFCET d'un point de vue partie commande décrivant le fonctionnement du
système étudié et tracer le schéma du séquenceur en technologie pneumatique.
Manuel de
Manuel
decours
cours
111
Chapitre A3
Leçon A 3- 14
Les Séquenceurs
Exercice 2 : système de marquage
1) Présentation
Ce système est conçu pour le marquage de savons sur la face supérieure par un poinçon.
Le système est constitué par :
– une goulotte d'alimentation ;
– un vérin pneumatique C1 de positionnement du savon ;
– un vérin pneumatique C2 de marquage du savon ;
– un séquenceur pneumatique gérant le fonctionnement du système.
2) Fonctionnement
Un appui sur le bouton poussoir départ cycle S0 et la présence d'une pièce entraînent :
– le positionnement du savon sous le poinçon par la sortie et la rentrée de la tige du vérin
C1 ;
– le marquage du savon par la sortie et la rentrée de la tige du vérin C2 ;
– l'évacuation du savon marqué par le vérin C1.
3) Travail demandé
Dresser le GRAFCET d'un point de vue partie commande décrivant le fonctionnement du
système étudié et tracer le schéma du séquenceur pneumatique.
Manuel de
Manuel
decours
cours
112
Chapitre A4
LES MICROCONTROLEURS
Leçon A4- 1
Présentation d’un microcontrôleur
I
II
III
IV
V
VI
VII
VIII
-
Mise en œuvre d’une application
à base de microcontrôleurs
Leçon A4- 2
I
II
III
IV
V
VI
VII
VIII
Manuel de cours
Introduction
Exemples de systèmes à base de microcontrôleurs
Place du microcontrôleur dans un système
Modèles usuels de microcontrôleurs
Identification des microcontrôleurs de Microchip
Brochage
Structure interne d’un microcontrôleur
Critère de choix d’un microcontrôleur
-
Introduction
Parcours à suivre
Exemple : gestion d'un feu tricolore
Application au cas du feu de croisement
Circuit d'horloge
Circuit de remise à zéro "Reset"
Les outils graphiques usuels
Exercices à resoudre
113
Leçon A 4-1
Chapitre A4
Présentation d’un Microcontrôleur
FICHE DE PREPARATION
O bjectifs du programme
- Identifier un microcontrôleur
- Réaliser des applications à bases de microcontrôleurs.
O bjectifs de la leçon
- Définir un microcontrôleur
- Identifier les principales familles des microcontrôleurs
P rérequis
- Systèmes combinatoires
- Systèmes séquentiels
- Grafcet
C onnaissances nouvelles
- Définition des microcontrôleurs.
- Identification des microcontrôleurs.
- Structure interne des microcontrôleurs
C onditions de réalisation et moyens
- Logiciel de simulation
- Documents constructeurs
- Maquettes
C ritères d’évaluation
- Identification correcte d’un microcontrôleur
- Définition correcte des principales familles des microcontrôleurs
Manuel de cours
114
Leçon A 4-1
Chapitre A4
I
Présentation d’un Microcontrôleur
Introduction
Réaliser l'activité de découverte du manuel d'activitésTP A 4-1
L'évolution sans cesse galopante des systèmes techniques amène de plus en plus les
concepteurs à remplacer la commande câblée, généralement à base de nombreux circuits
intégrés, par un seul et unique circuit programmable capable à lui seul de remplir toutes les
fonctions exigées par le système.
Parmi les circuits qui font partie de cette famille, on cite les : PLD, CPLD, FPGA, les
microcontrôleurs ... etc.
II Exemple de systèmes à base de microcontrôleurs
Les systèmes et les objets techniques à base de microcontrôleur(s) prennent de plus en
plus de place dans notre quotidien.
Téléviseur
Téléphone mobile
Clé USB
Play Station
Le microcontrôleur présente des avantages tels que :
- la simplicité de mise en œuvre ;
- la grande capacité de traitement ;
- le coût relativement faible.
Manuel de cours
Lave linge
115
Chapitre A4
Leçon A 4-1
Présentation d’un Microcontrôleur
III Place du microcontrôleur dans un système :
Manuel de cours
116
Leçon A 4-1
Chapitre A4
Présentation d’un Microcontrôleur
IV Types et modèls usuels de microcontrôleurs
Plusieurs constructeurs et fabricants proposent une multitude de références dans le
domaine des microcontrôleurs.
Parmi ces fabricants on cite :
Intel
Motorola
Atmel
Microchip
STmicroelctronics
Réaliser l'activité 1 du manuel d'activitésTP A 4-1.
Remarques :
- pour des raisons pédagogiques, ce cours traitera des microcontrôleurs de Microchip; - les
propos avancés à ce sujet sont transférables aux autres types de
microcontrôleurs ;
- les exemples traités dans le manuel de cours ou le manuel d’activités utilisent comme
support soit le 16F84 soit le 16F628 ; toutefois l’utilisation d’une autre
référence demeure toujours possible pour vu que les outils de programmation soient
disponibles.
Manuel de cours
117
Chapitre A4
Leçon A 4-1
Présentation d’un Microcontrôleur
CHAPITRE A4
NB : les microcontrôleurs de Microchip sont désignés par le synonyme PIC.
Suivant les auteurs, PIC peut prendre diverses significations :
- programmable integred circuit ;
- programmable intelligent circuit ;
- …etc
Le constructeur opte pour la signification suivante :
- Peripheral Interface Controller.
V Identification des microcontrôleurs de Microchip
Un PIC est généralement identifié par une référence de la forme suivante :
xxXXyy- zz
- xx : famille du composant, actuellement " 12, 14, 16, 17 et 18 ".
- XX : type de mémoire programme :
* C : EPROM ou EEPROM ;
* CR : PROM ;
* F : Flash
- yy : Identificateur.
- zz : vitesse maximale du quartz de pilotage.
Exemple :
Réaliser l'activité 2 du manuel d'activitésTP A 4-1
Pour plus d'informations, consultez le Data Sheet du constructeur, disponible sur
le site suivant :
http://www.Microchip.com
Manuel de cours
118
Chapitre A4
Leçon A 4-1
Présentation d’un Microcontrôleur
CHAPITRE A4
VI Brochage : exemple de PIC : 16F84 et 16F876
Ces microcontrôleurs sont en boîtier DIL : (Dual in line)
Réaliser l'activité 3 du manuel d'activités TP A 4-1
VII Structure interne d’un microcontrôleur 16F876
Manuel de cours
119
Chapitre A4
-
-
-
-
-
Leçon A 4-1
Présentation d’un Microcontrôleur
Cette architecture, fait apparaître les modules suivants :
l'unité arithmétique et logique "UAL" ou "ALU en anglais", elle est chargée de gérer
l'exécution du programme utilisateur ;
la mémoire programme qui contient le programme utilisateur, tel qu'il est défini pour
répondre aux exigences du système auquel il est dédié. Elle peut être de type : OTP,
EPROM, EEPROM, PROM ou FLASH ;
la mémoire vive "RAM" qui permet la sauvegarde des données intermédiaires du
programme. Les informations contenues dans cette mémoire sont modifiables et leur
maintien nécessite la présence de l'énergie électrique ;
la mémoire EEPROM qui permet la sauvegarde "permanente" sans présence d'énergie
des données utilisateurs telles que le mot de passe, les paramètres de configuration
système, menu, langue….
les ports Entrées/Sorties : qui permettent de communiquer avec le monde extérieur. De ce
fait le microcontrôleur intègre un ensemble de broches, configurables en "Entrée ou Sortie"
par une programmation adaptée ;
les bus : les différents constituants du microcontrôleur communiquent entre- eux au moyen
de bus, on distingue alors :
* le bus de données, il est bidirectionnel. Le nombre de ses liaisons défini le type de
microcontrôleur " un microcontrôleur est dit à 8 bits si son bus de données comporte 8
liaisons " ;
* le bus d'adresses, il est unidirectionnel. Avec ce bus, le microcontrôleur crée une
adresse et sélectionne une case mémoire, avec laquelle l'UAL se met en relation ;
* Le bus de contrôle, il comporte plusieurs liaisons, chacune d'elles réalisant une fonction
particulière telle que la lecture ou l'écriture dans une mémoire….
NB : en plus de ce qui vient d'être cité, un microcontrôleur peut intégrer un ou plusieurs
convertisseurs analogique numérique CAN (utiles dans le cas d'acquisition de grandeur
physique telle que température ou autre).
Les "Data Sheet" des fabricants et constructeurs, renseignent amplement sur ces
différentes spécifications.
Réaliser l'activité 4 du manuel d'activitésTP A 4-1
VIII Critères de choix d’un microcontrôleur
Le choix judicieux d'un microcontrôleur, pour une application donnée dépend
principalement :
- du nombre d'entrées/sorties de l'application cible ;
- du type de mémoire programme : flash, Eprom, OTP… et de sa taille ;
- de la présence ou de l'absence des convertisseurs Analogiques/Numériques CAN ;
- de l'existence ou non d'une mémoire EEPROM ;
- de l'existence ou non d'un bus I2C.
D’autres critères considérés tels que :
- la disponibilité du composant sur le marché local ;
- la facilité de sa mise en œuvre ;
- le prix ;
- l'approvisionnement multisource.
Manuel de cours
120
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
FICHE DE PREPARATION
O bjectifs du programme
- Mettre en œuvre les outils d'aide à la programmation graphique.
O bjectifs de la leçon
- Maîtriser les outils graphiques de programmation
- Mettre en œuvre un système en fonctionnement à micro-contrôleur.
P rérequis
- Systèmes combinatoires
- Systèmes séquentiels
- Grafcet
C onnaissances nouvelles
- Définition des microcontrôleurs.
- Identification des microcontrôleurs.
- Structure interne des microcontrôleurs
C onditions de réalisation et moyens
- Logiciel de simulation
- Documents constructeurs
- Maquettes
C ritères d’évaluation
- Outils graphiques correctement matrisés
- Mise en œuvre réussie.
Manuel de cours
121
Leçon A 4-2
Mise en œuvre d’une application
à base de Microcontrôleurs
Chapitre A4
I
Introduction
Réaliser l'activité de découverte du manuel d'activités TP A 4-2
La mise en œuvre d'une application, à base de microcontrôleur, consiste à traduire un
cahier des charges en un programme code, puis à le transférer vers la mémoire programme
du microcontrôleur.
Pour ce faire, divers outils de développement sont mis à la disposition du concepteur.
Parmi ces outils, on cite :
- la programmation bas niveau en assembleur.
- la programmation mettant en œuvre un langage évolué tels que langage C, Basic,
Pascal, etc.…
- la programmation graphique, elle est basée sur l'interconnexion graphique de symboles
ou modules "algorigrammes, grafcet et autres…".
NB : la suite de cette leçon portera sur les outils graphiques particulièrement ceux à base
d’algorigramme néanmoins ; l’utilisation à base de grafcet demeure toujours possible.
La programmation mettant en oeuvre l'un des langages évolués cités précédemment sera
étudié ultérieurement.
II
Parcours à suivre
La résolution par la méthode graphique des problèmes de logiques combinatoire ou
séquentielle, dont la commande met en œuvre des structures microprogrammées à base de
microcontrôleurs, nécessite le passage par les étapes suivantes, quelques soit le type et la
famille du microcontrôleur.
Analyse du
problème
Test
Transcription
Programmation
Transfet
III Exemple : gestion d’un feu de croisement
III- 1- Cahier des charges
On désire automatiser la gestion d’un feu de croisement, réglant la circulation d'un
carrefour à deux voies. Le cahier des charges stipule la possibilité de modifier les
temporisations par l'opérateur en fonction de la densité de la circulation.
L'étude se limitera à une seule rampe.
Le fonctionnement normal est décrit par le chronogramme suivant :
Manuel de cours
122
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
Réaliser l'activité 1 du manuel d'activitésTP A 4-2
III- 2- Notion d'algorithme
III- 2- 1- Définition
Un algorithme est une suite ordonnée d'actions que doit réaliser un processus de
commande pour aboutir à un résultat fixé d'avance. Cette suite d'opérations sera
décomposée en actions élémentaires ou instructions. Un algorithme peut être :
- représenté graphiquement par un organigramme, algorigramme ou GRAFCET.
- écrit sous forme littérale à l’aide d’un langage algorithmique.
NB : l'étude de l'algorithmique, ne fera pas l'objet de ce cours, mais les structures les plus
usuelles seront rappelées lorsque le besoin se fait sentir ; en contre partie on s'intéressera
en détails à la traduction graphique des cahiers des charges sous forme d'algorigramme
(cette traduction reste possible sous forme d’un GRAFCET.
Manuel de cours
123
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
III- 2- 2- Organigramme ou algorigramme
L'organigramme ou l'algorigramme est une représentation graphique normalisée (NF Z
67- 010 ). Il est utilisé pour analyser ou décoder un problème de logique.
Exemple
Algorigramme réalisé avec Logipic version 1.54g
Pour plus d’information consulter le site
http://idmax.free.fr/
Manuel de cours
124
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
III- 2- 3- Principaux symbôles utilisés
Symbole
Désignation
Symbole
Symbole général "
traitement "
Opération ou groupe
d'opérations sur des
données, instructions,
etc.., ou opération pour
laquelle il n'existe aucun
symbole normalisé.
Sous- programme
Portion de programme
considérée comme une
simple opération.
Entrée - Sortie
Mise à disposition d'une
information à traiter ou
enregistrement d'une
information traitée
Décision
Exploitation de
conditions variables
impliquant le choix d'une
voie parmi plusieurs.
Symbole couramment
utilisé pour représenter
une décision ou un
aiguillage.
Manuel de cours
125
Désignation
Préparation
Opération qui
détermine
partiellement ou
complètement la voie
à suivre dans un
embranchement ou un
sous-programme.
Symbole également
utilisé pour préparer
une décision ou
mettre un aiguillage
en position.
Début, fin,
interruption
Début, fin ou
interruption d'un
organigramme, point
de contrôle,
etc...
SYMBOLES
AUXILIAIRES
Renvoi
Symbole utilisé deux
fois pour assurer la
continuité lorsqu'une
partie de ligne de
liaison n'est pas
représentée.
Commentaire
Symbole utilisé pour
donner des indications
marginales.
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
III- 2- 4- Structures algorithmiques usuelles
a- les actions de base
-
l'affectation : c'est l'action d'attribuer une valeur à une variable, elle se note de la façon
suivante.
Symbole
Language algorithmique
En identificateur range valeur.
-
La saisie de valeurs et l'édition de résultats
Symbole
Language algorithmique
pour la saisie on note LIRE( );
pour l'édition on note ECRIRE( );
permettant de lire ou d'écrire les valeurs
d'une ou de plusieurs variables.
b- les structures alternatives
-
structure alternative de base : selon l'état de la condition, deux traitements distincts sont
possibles.
Symbole
Language algorithmique
Si condition ALORS action1
SINON action2
FinSi
Réaliser l'activité 2 du manuel d'activités TPA4-2.
Manuel de cours
126
Leçon A 4-2
Mise en œuvre d’une application
à base de Microcontrôleurs
Chapitre A4
NB : si l'action 2 est vide
Symbole
Language algorithmique
Si condition
ALORS action1
SINON Rien
FinSi
Réaliser l'activité 3 du manuel d'activités TP A4-2.
-
Structures alternatives imbriquées : ce type de structures apparaît lorsque l'une ou les
actions de la structure de base, débouchent elles aussi sur des choix.
Si condition 1
Language algorithmique
condition2
ALORS Si
Alors action1.1
SINON action1.2
FinSi
condition 3
SINON SI
Alors action2.1
SINON action2.2
FinSi
FinSi
-
Structure de choix multiple
possibilités.
: lorsque le choix s'impose entre plus que deux
Language algorithmique
SELON expression
valeur1 : action1;
valeur2 : action2;
…………………….
……………………….
Manuel de cours
valeurN : actionN;
AUTREMENT : action0 ;
FIN_SELON;
127
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
c- Les structures itératives ou répétitives : ces structures, permettent d'exécuter
plusieurs fois une séquence d'instructions.
- Nombre d'itérations connu
Language algorithmique
I : entier;
POUR I variant de <valeur_initiale> jusqu'à <valeur_finale> par pas de <n>
FAIRE
Actions
FINFAIRE ;
Manuel de cours
128
Leçon A 4-2
Chapitre A4
-
Mise en œuvre d’une application
à base de Microcontrôleurs
Nombre d'itérations inconnu
> Test en tête de boucle
Language algorithmique
TANT QUE condition FAIRE Action(s)
FIN TANT QUE
Manuel de cours
129
Leçon A 4-2
Mise en œuvre d’une application
à base de Microcontrôleurs
Chapitre A4
> Test en fin de boucle
Language algorithmique
FAIRE Action(s)
TANT QUE condition
Réaliser l'activité 4 du manuel d'activitésTP A 4-2
IV Application au feu de croisement
IV- 1- Affectation des entrées / sorties
Analyse du
problème
Test
Transcription
Programmation
Transfet
Réaliser l'activité 5 du manuel d'activitésTP A 4-2
Manuel de cours
130
Leçon A 4-2
Mise en œuvre d’une application
à base de Microcontrôleurs
Chapitre A4
IV- 2- Algorigramme correspondant
Analyse du
problème
Test
Transcription
Programmation
Transfet
La traduction du cahier des charges en algorigramme a donné le résultat suivant :
NB : L'algorigramme ci dessus a été saisi sous logipic version 1.54g beta ; logiciel mis à la
disposition des utilisateurs gratuitement sur internet.
Répondre aux questions (a et b) du manuel d'activité TP A4-2.
Manuel de cours
131
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
IV- 3- Assemblage et compilation
Analyse du
problème
Test
Transcription
Programmation
Transfet
Le même logiciel utilisé pour la saisie de l'organigramme, permet via son interface :
a) l'assemblage du fichier source, donnant ainsi lieu à un fichier portant le même nom que
le fichier source et d'extension ".asm".
b) la compilation du fichier ".asm ", donnant lieu au fichier code exécutable (appelé aussi
code objet), d'extension " .hex " par le biais de la commande "compiler" qui lance à son
tour l'application Mpasmwin.
Répondre aux questions (c et d) de l'activité 6 du manuel d'activité TP A4-2
Manuel de cours
132
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
Le résultat de la compilation est signalée comme suit :
Erreur de compilation due à l'absence du
fichier " .INC " relatif au microcontrôleur
Compilation réussie
Parfois la compilation n'aura même pas lieu et un message d'erreur s'affiche comme suit :
vous invitant à redéfinir le chemin d'accès à l'application Mpasmwin ; dans ce cas procéder
comme suit pour configurer le chemin d'accés :
Manuel de cours
133
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
Une étape de simulation s'avère parfois nécessaire en particulier pour les composants
programmables une seule fois " OTP ", tel que les microcontrôleurs de la famille 12Cxxx ou
16Cxxx, évitant ainsi les mauvaises surprises.
IV- 4- Simulation
Analyse du
problème
Test
Transcription
Programmation
Transfet
Plusieurs logiciels permettent la simulation et la vérification de ce type de fichiers ".HEX";
parmi ces logiciels on cite MpLab de Microchip, Proteus, orcad, etc.….
Manuel de cours
134
Leçon A 4-2
Mise en œuvre d’une application
à base de Microcontrôleurs
Chapitre A4
Exemple de circuit saisi sur le logiciel Isis de Proteus en vue de sa simulation
Réaliser l'activité 7 du manuel d'activitésTP A 4-2
IV- 5- Transfert du fichier exécutable vers le microcontrôleur
Analyse du
problème
Test
Transcription
Programmation
Transfet
La programmation proprement dite des microcontrôleurs, nécessite la mise en œuvre de
deux composantes, une composante matérielle et une composante logicielle.
Manuel de cours
135
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
IV- 5- 1- La composante matérielle
Elle est constituée d'une carte de programmation appelée programmateur , d'un câble de
liaison et bien entendu d'un micro- ordinateur pour piloter l'ensemble.
Exemples
NB : plusieurs schémas de programmateurs et parfois même les typons correspondants
sont mis sur Internet gratuitement.
Manuel de cours
136
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de Microcontrôleurs
IV- 5- 2- La composante logicielle
Elle se limite généralement à l'emploi d'un logiciel spécialisé permettant le transfert du
fichier ".HEX" du micro- ordinateur vers le microcontrôleur via la carte de programmation.
Plusieurs logiciels de ce type sont mis gratuitement sur Internet à la disposition des
utilisateurs parmi les quels on cite le fameux IcProg.
Interface de IcProg
Réaliser l'activité 8 du manuel d'activitésTP A 4-2
Manuel de cours
137
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
V Circuit d'horloge
Pour fonctionner correctement, certains microcontrôleurs nécessitent la présence d'une
horloge qui doit être câblée entre les bornes "OSC1 et OSC2".
Cette horloge peut être réalisée de différentes façons.
IV- 1- Avec Quartz
15 ≤ C ≤ 33 PF
IV- 2- Avec horloge externe
IV- 3- Avec circuit RC
5k ≤ R ≤ 100 k
C ≥ 20 pF
Dans tous les cas la fréquence maximale
d'utilisation va dépendre du microcontrôleur
utilisé. Le suffixe indiqué sur le boîtier donne
la nature de l'horloge à utiliser et sa
fréquence maximale.
NB : certains microcontrôleurs, possèdent un
oscillateur interne tel que le cas du 16F628
Manuel de cours
138
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
VI Circuit de remise à zéro "Reset"
Nécessaire généralement pour réaliser une initialisation forcée de l'application
Réaliser l'activité 9 du manuel d'activités TP A4-2
VII Les outils graphiques usuels
-
EditAlgo : http://www.abcelectronique.com/bigonoff/ (gratuit)
Realizer : http://www.actum.com/ (payant)
Flowcode : http://www.multipower- fr.com/ (payant)
Multiprog : http://micrelec.fr/ (payant)
Logicpic : http://idmax.free.fr/ (gratuit)
Remarque
Un logiciel permettant le passage direct de l’équation au fichier code objet est mis
gratuitement sur internet par un enseignant français :
[email protected]
Manuel de cours
139
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
VIII Exercices à résoudre
Exercice 1
A partir de l'algorigramme ci-dessous, déduire l'équation de la sortie S en fonction des
entrées a,b,c et d.
Exercice 2
On compte réaliser une fonction mémoire à marche prioritaire avec deux boutons poussoirs
(m et a) et un relais X.
Ecrire l'équation de X en fonction de a,b et x.
On donne l'algorigramme correspondant incomplet, compléter ce dernier en plaçant la valeur
adéquate (0 ou 1) à la sortie de chaque bloc test.
Manuel de cours
140
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
Exercice 3 «Avertisseur pour automobiliste»
L'avertisseur qu'on compte concevoir doit se déclencher si l'une des conditions suivantes
est remplie :
- Ceintures de sécurité non attachées et moteur en marche.
- Phares allumés et moteur à l'arrêt.
- Moteur en marche et ceinture attachée et porte conducteur ouverte.
Travail demandé :
Traduire le fonctionnement par un algorigramme.
Exercice 4
Soit le schéma structurel suivant :
Travail demandé :
1-Etablir la table de vérité correspondante.
2-Quelle fonction réalise ce montage lorsque x=0 et lorsque x=1.
3-Déduire l'équation simplifiée correspondante.
4-Traduire le fonctionnement par un algorigramme.
Exercice 5 “chenillard à 4 Leds”
On souhaite réaliser un chenillard à 4 Leds numérotées de 0 à 3, à l'aller les leds 0 à 3
s'allument successivement au retour ce sont les leds 2 à 0 (la led 3 n'est pas allumée au retour).
Afin de bien visualiser les leds, une temporisation sera faite après chaque allumage. Cette
temporisation sera utilisée à ”l'aller” comme au “retour”.
Travail demandé : Etablir l'algorigramme correspondant au fonctionnement
Exercice 6 “Treuil de levage”
Le chariot étant initialement au poste n°1, (treuil en bas) un appui sur Dcy provoque la
montée du treuil, puis le déplacement jusqu'au poste n°2, puis la descente du treuil.
Le treuil reste en position basse pendant 3s, puis remonte, revient au poste n°1 et redescend
(fin du cycle).
Travail demandé : Traduire le fonctionnement par un algorigramme.
Exercice 7 “Treuil de levage”
Reprendre l'exercice précédent avec la modification suivante : l'appui sur Dcy, entraine la
réalisation du cycle 3 fois de suite.
Travail demandé : Modifier l'algorigramme précédent, pour répondre aux nouvelles exigences.
Manuel de cours
141
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
Exercice 8
Soit l'algorigramme ci-dessous.
1-Quelle est la référence du microcontrôleur concerné par cet algorigramme ?
2-Traduire l'algorigramme en un chronogramme.
NB : prendre comme echelle 10mm pour 5000000 microsecondes.
Exercice 9 “Automatisation d'une cuve”
Le niveau d’un liquide dans une cuve est contrôlé par deux capteurs de niveau (nb,nh) et
deux capteurs de température (th,tb). Une vanne permet le remplissage tant que le niveau
haut n'est pas atteint. Une résistance chauffante assure le chauffage jusqu'à la température
maximale. Une sécurité de fonctionnement interdit le chauffage si le niveau bas est atteint,
de même le remplissage est arrêté si la température minimale est atteinte.
Travail demandé : Traduire le fonctionnement par un algorigramme.
Manuel de cours
142
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
Exercice 10 ”Store automatique”
Le store objet de l'étude est équipé de deux capteurs (l'un détecte la présence de soleil,
l'autre détecte la présence de vent).
Deux modes de fonctionnement peuvent être envisagés :
En marche automatique : lorsqu'un seuil d'intensité lumineuse est atteint, le store se baisse
automatiquement. Si un seuil de vitesse du vent est atteint, le store remonte malgré la
présence du soleil.
En marche manuelle, deux boutons de commande permettent la descente ou la montée
du store. La présence du vent rend ces deux commandes sans effet. Le capteur de soleil n'a
aucun effet dans ce mode de fonctionnement.
Désignation des différentes variables :
Km : pour la montée
Kd : pour la descente.
V : détecteur vent
S : détecteur soleil.
Bm: bouton montée.
Bd : bouton descente
Travail demandé :
Etablir l'algorigramme correspondant en cas de fonctionnement en mode automatique.
Exercice 11 “Automatisation d'une porte”
L'entrée d'un hôtel est équipée d'un système semi-automatique de contrôle d'accès.
Ce système est composé :
- d'un verrou électrique Ve ;
- d'un clavier numérique situé à l'extérieur Clav ;
- d'un bouton poussoir situé dans la loge du concierge BPo.
d'une horloge interne H
Deux modes de fonctionnement sont considérés :
- entre 8h00 et 22h00, le concierge, apercevant un client à l'entrée , actionne BPo pour lui
permettre l'accès à l'hôtel.
- entre 22h00 et 8h00, l'hôtel, n'ayant pas de veilleur de nuit, fournit à ses clients un code
qu'ils taperont sur le clavier numérique. La validation de code par le système de contrôle
d'accès aura pour effet le déverrouillage de la porte.
Manuel de cours
143
Leçon A 4-2
Chapitre A4
Mise en œuvre d’une application
à base de microcontrôleurs
Algorigramme correspondant:
Travail demandé
1.Vérifier l'Algorigramme proposé.
2.Déduire l'équation logique du système.
Manuel de cours
144
Chapitre A5
Notions d’asservissement linéaire
Leçon A5- 1
NOTIONS D'ASSERVISSEMENT LINEAIRE
I
- Mise en situation
II - Définition
III - Modélisation d'un système asservi
IV - Schéma fonctionnel
V - Simplification des schémas fonctionnels
VI - Exemples de systèmes asservis.
VII - Exercices résolus
VIII - Exercices à résoudre
Manuel de cours
145
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
FICHE DE PREPARATION
O bjectifs du programme
- Décrire le fonctionnement d'un système asservi
- Représenter le schéma fonctionnel d'un système asservi.
O bjectifs de la leçon
-
Modéliser un système asservi
Etablir le schéma fonctionnel d'un système asservi
Traduire un schéma fonctionnel par des équations
Traduire des équations par un schéma fonctionnel
P rérequis
- Les montages fondamentaux à base d'A.L.I.
C onnaissances nouvelles
- Schéma fonctionnel d'un système asservi
- Règles de simplification d'un schéma fonctionnel
- Mise en équation d'un schéma fonctionnel.
C onditions de réalisation et moyens
- Maquette d'asservissement de position et de vitesse
- Micro- ordinateur + logiciel de simulation
C ritères d’évaluation
- modélisation d'un système asservi correcte
- schéma fonctionnel d'un système asservi correctement établi.
- passage d'un schéma fonctionnel et inversement correctement reussi.
Manuel de cours
146
Chapitre A5
I
Leçon A5-1
Notions d’asservissement linéaire
Mise en situation
I- 1- Activité de découverte
Réaliser l'activité de découverte du manuel d'activité TPA5- 1
I- 2- Exemple
Régulation de niveau dans une station d'alimentation en eau potable
a- Présentation du problème
Chaque agglomération dispose d'un château d'eau assurant son alimentation en eau potable.
Ce château est alimenté par une arrivée d'eau dont le débit est réglé par une vanne
d'entrée.
Une vanne de sortie représente les robinets des différents abonnés et son ouverture règle le
débit de sortie qui n'est pas constant à cause de la consommation aléatoire des abonnés.
On cherche généralement à maintenir le niveau d'eau dans le château à une hauteur fixée
dite :
valeur de consigne (HC) en vue de maintenir le débit et la pression constants.
Deux solutions peuvent être envisagées :
Solution 1 : système manuel
Un opérateur doit accomplir les tâches suivantes pour maintenir ce niveau d'eau constant :
– la première tâche est d'observer le niveau d'eau ce qui exige une précision dans la
mesure;
– la deuxième tâche est de comparer le niveau d'eau observé à celui souhaité ce qui
nécessite une intelligence car l'opérateur doit effectuer un calcul ;
– la troisième tâche est d'agir sur la vanne d'entrée dans le sens de la fermeture ou de
l'ouverture ce qui nécessite un certain effort pour ouvrir ou fermer la vanne en fonction
des opérations précédentes.
Ces tâches combinées entre elles peuvent être matérialisées par le schéma synoptique
suivant :
Manuel de cours
147
Chapitre A5
Leçon A5-1
Notions d’asservissement
linéaire
Notions d’asservissement linéaire
Conclusion : observer,mesurer comparer et agir : sont les fonctions principales demandées
à l'opérateur.
Solution N°2 : système automatisé
La problématique est de maintenir le niveau d'eau dans le château d'eau à une hauteur
constante.
Pour pallier les inconvénients du système manuel, les fonctions principales observer,
comparer et agir d'un système asservi sont réalisées automatiquement et respectivement par
un capteur, un comparateur et un actionneur, ce qui permet d'obtenir la structure suivante de
ce système :
Manuel de cours
148
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
Les composants électroniques étudiés dans les leçons précédentes permettent de
conceptualiser ce système automatisé comme suit :
Réaliser l'activité 1 du manuel d'activité TP A5- 1
II Définitions
a- Le système asservi
Un système est dit asservi si sa grandeur mesurable de sortie est obligée de suivre
l'évolution de l'entrée variable appelée consigne sur laquelle on peut agir.
b- Le capteur
Un capteur est un dispositif physique qui fournit une information image (mesure) de la
grandeur de sortie par sa mesure.
Exemple : pour le château d'eau le capteur est le potentiomètre avec le flotteur.
c- L'actionneur
Un actionneur est un dispositif physique permettant d'agir sur la grandeur de sortie.
Exemple : pour le château d'eau l'actionneur est l'électrovanne.
d- Le comparateur
Un comparateur fournit un signal qui représente l'écart entre la consigne et la sortie.
Exemple : pour le château le comparateur est le soustracteur à base d'A.L.I.
Manuel de cours
149
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
III Modélisation d’un système asservi
Modéliser un système asservi, c'est le décrire par un ensemble d'équations mathématiques
qui peuvent être représentées par un schéma fonctionnel et réciproquement. Le schéma
fonctionnel utilise les symboles graphiques suivants :
La chaîne directe (ou chaîne d'action) met en œuvre une puissance importante alors que
la chaîne de retour (ou chaîne d'information) traite des signaux de faible puissance.
IV Schéma fonctionnel
Le schéma fonctionnel de la station d'alimentation en eau potable peut être représenté
comme suit :
En tenant compte des grandeurs d'entrée et de sortie de chaque bloc fonctionnel du
schéma structurel de la station on peut écrire :
Manuel de cours
150
Chapitre A5
un
Leçon A5-1
Notions d’asservissement linéaire
la tension de consigne : Vc = (Hc/ l).V ;
la tension de sortie : Vs = (Hs/ l ).V ;
l'écart :
= Vc - Vs
le montage à base de IC1 étant un soustracteur ;
la tension d'attaque du transistor est VT = 3
le montage à base de IC2 étant
amplificateur non- inverseur.
Le schéma fonctionnel devient :
Réaliser l'activité 2 du manuel d'activité TP A5- 1
V Simplification des schémas fonctionnels
V- 1- Définition
Simplifier un schéma fonctionnel consiste à fusionner plusieurs blocs en un seul tout en
respectant les relations entre l'entrée et la sortie de chaque bloc.
V- 2- Règles de simplification
Manuel de cours
151
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
V-3-Passage d'un système d'équation à un schéma fonctionnel
Exemple 1 : Soit l'équation suivante:
= e- s ;
et s = .
= k.
Le schéma fonctionnel correspondant est :
Manuel de cours
152
Leçon A5-1
Chapitre A5
Notions d’asservissement linéaire
Exemple 2 : système à deux équations à deux inconnues
Le schéma fonctionnel relatif à ce système d'équations est :
V- 4- Passage d'un schéma fonctionnel à un système d'équations
Exemple 1 : soit le schéma fonctionnel suivant
Les équations de fonctionnement sont :
x = e - y ; y = A.x - s et s = B.y
Exemple 2 : soit le schéma fonctionnel suivant :
Les équations de fonctionnement sont :
= e - c. s
s = [ p + K ].W
Manuel de cours
153
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
V- 5- Formule de BLack
On considère le schéma fonctionnel suivant :
l'écart est donné par la relation :
= e - G.s ;
la sortie s a pour expression : s = H.
;
remplaçons l'écart par son expression : s = H.(e - G.s ) = H.e - H.G.s
On obtient :
s ( 1 + H.G) = H.e
H
s=
.e
1 + H.G
Ce qui permet d'avoir l'expression de la sortie (S) en fonction de la consigne (e) et des
paramètres d'asservissement. Cette grandeur est appelée Transmittance (ou fonction de
transfert) du système, notée T.
T=
s
e
H
=
.e
1 + H.G
Cette relation connue sous le nom de formule de BLACK, permet de réduire le schéma
fonctionnel à celui ci- dessous.
e
s
H
1+HG
Exemple 2 : simplifier le schéma fonctionnel suivant en utilisant la formule de BLACK
Manuel de cours
154
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
VI Exemples de système d’asservissement
VI- 1- Asservissement de position
a- Schéma de principe
b- Schéma fonctionnel
Manuel de cours
155
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
VI- 2- Asservissement de vitesse
a- Schéma de principe
b- Schéma fonctionnel
Manuel de cours
156
Chapitre A5
Leçon A5-1
Notions
d’asservissement
linéaire
Notions
d’asservissement
linéaire
VII Exercice résolu
Soient les schémas des figures (a), (b), (c), (d) et (e)
Pour chaque schéma: donner l'expression de la sortie S et déduire l'influence de la
perturbation b.
Solution
Figure ( a ) : sans contre réaction
S = eKu + b
On constate que l'action de la perturbation se trouve intégralement à la sortie.
Figure ( b ) : avec contre réaction :
Ku
b
S=(E- S)Ku + b S = (E- S)Ku + b
S(1+ku) = EKu+b
S=
E+
1+ku
1+ku
L'action de b est atténuée, puisqu'elle est divisée par 1 + Ku.
Figure ( c ) : Avec perturbation en entrée ( sans contre réaction) :
S = KuE + Kub
La perturbation a le même effet que l'entrée.
Figure ( d ) : bruit en entrée ( avec contre réaction ) :
Ku
K
S=Ku (E- S+ b)
S(1+ku) = EKu+ bKu
S=
E+ u
1+ku
1+ku
La perturbation a même effet que l'entrée E.
Figure ( e ) : avec régulateur :
Donc :
KR
K
E+
b
S=
1+KR
1+KR
b
L'effet de la perturbation est atténué car elle est divisée par 1 + KR.
Manuel de cours
157
Chapitre A5
Leçon A5-1
Notions d’asservissement linéaire
Conclusion
– Un système asservi doit d'une part obéir à l'ordre qui lui est appliqué (consigne) d'autre
part s'opposer aux effets des perturbations (rafales de vent sur un avion ; variation de la
tension de réseau sur une alimentation stabilisée)
– Il existe deux types d'asservissements :
* système régulé (régulation) fonctionne avec une entrée (consigne) constante ou
avec une entrée qui varie par palier (fer à repasser automatique) ;
* système asservi lorsque l'entrée varie d'une manière quelconque (asservissement
de vitesse).
VIII Exercice à résoudre
Considérons le schéma structurel de la maquette d'asservissement de position disponible
dans les laboratoires :
L'angle maximal balayé par les deux curseurs associés aux capteur et au potentiomètre de
consigne correspond à 180° et délivrant ainsi la tension de référence Vref = 12v.
1) Exprimer la tension Vc en fonction de c et la représenter par un schéma fonctionnel.
2) Exprimer la tension Vs en fonction de s et la représenter par un schéma fonctionnel.
3) Exprimer la tension V1 en fonction de Vc et Vs et la représenter par un schéma fonctionnel.
4) Représenter le schéma fonctionnel du système en remplaçant le processeur par un bloc P.
Manuel de cours
158
Chapitre B1
LES MOTEURS
A COURANT CONTINU
Leçon B1-1
Présentation d’un moteur à courant continu
I II III IV V VI VII VIII IX -
Mise en situation
Introduction
Constitution
Principe de fonctionnement
Réversibilité
Inversion du sens de rotation
Modélisation
Plaque signalétique
Exercices à resoudre
Etude d’un moteur à courant continu
Leçon B1- 2
I II III IV V VI VII -
Manuel de cours
Force contre électromotrice
Schéma équivalent à l'induit
Problème de démarrage
Vitesse de rotation
Bilan énergétique
Exercices résolus
Exercices à résoudre
159
Leçon B1-1
Présentation d’un moteur
à courant continu
Chapitre B1
FICHE DE PREPARATION
O bjectif du programme
- Modéliser un moteur à courant continu .
O bjectifs de la leçon
- Identifier les différentes parties d'un moteur à courant continu.
- Vérifier la loi de Laplace dans un moteur à courant continu en
fonctionnement.
- Modéliser un moteur à courant continu .
P rérequis
- Loi de Laplace .
C onnaissances nouvelles
- Constitution d'un moteur à courant continu .
- Modélisation d'un moteur à courant continu.
C onditions de réalisation et moyens
- Moteur à courant continu.
- Appareils de mesures électriques .
C ritères d’évaluation
- Les différentes parties d'un moteur à courant continu sont correctement
identifiées.
- La loi de Laplace est vérifiée.
- Le moteur à courant continu est correctement modélisé.
Manuel de cours
160
Leçon B1-1
Présentation d’un moteur
à courant continu
Chapitre B1
I
Mise en situation
Activité de découverte
Réaliser l'activité de découverte du manuel d'activités TP B1- 1
II Introduction
Les moteurs à courant continu sont encore largement utilisés. Certains types, en traction
électrique, possèdent un fort couple au démarrage. Pour les faibles puissances, ils se prêtent
bien à la variation de leur vitesse grâce à des dispositifs électroniques simples. Miniaturisés,
ces moteurs sont très utilisés pour la commande des microsystèmes avec une régulation
précise de leur vitesse et de leur couple. Le point faible de ces moteurs demeure l'entretien
régulier du collecteur et des balais.
III Constitution
La machine à courant continu est constituée de
trois parties principales :
1) une partie fixe, appelée STATOR ou
INDUCTEUR.
2) une partie mobile appelée ROTOR ou INDUIT.
3) un ensemble COLLECTEUR -BALAIS.
1: pôle inducteur
2: induit
3: balais et porte balais
Manuel de cours
161
Leçon B1-1
Chapitre B1
Présentation d’un moteur
à courant continu
III- 1- Le stator
Le stator ou l'inducteur crée le flux dans la machine. Deux moyens peuvent être utilisés
pour produire le champ magnétique :
– par un aimant permanent, le flux est toujours constant ; la
machine est dite à aimant permanent.
– Par une bobine d'excitation appelée enroulement inducteur, pour canaliser les lignes de
champ on utilise un circuit ferromagnétique fermé.
Dans les moteurs de grandes puissances, l'ensemble constitué par les bobines et les
cornes polaires remplace l'aimant permanent.
III- 2- Le Rotor
Le rotor ou induit est constitué par un cylindre d'acier doux libre en rotation et monté sur
des roulements ou des bagues. A sa périphérie sont placés des conducteurs logés dans des
encoches et reliés aux lames du collecteur sur lequel viennent frotter deux balais.
Manuel de cours
162
Leçon B1-1
Chapitre B1
Présentation d’un moteur
à courant continu
Les deux balais assurent la liaison électrique avec le circuit extérieur par l'intermédiaire
d'une plaque à bornes du moteur.
Représentation simplifiée d'un rotor d'une machine à courant continu
III- 3- Collecteur
La figure suivante représente le collecteur d'une machine à courant continu.
Réaliser l'activité 1 du manuel d'activités du TP B1- 1
IV Principe de fonctionnement
Un moteur à courant continu est mis en rotation grâce à une force électromagnétique selon
la loi de Laplace.
Cette force s'applique à tout conducteur MP parcouru par un courant et placé dans un
champ magnétique. L'expérience suivante met en évidence ce principe :
Expérience de LAPLACE
Manuel de cours
163
Leçon B1-1
Présentation d’un moteur
à courant continu
Chapitre B1
L'aimant en U crée le champ magnétique. Le générateur à courant continu débite un
courant I dans le conducteur mobile par l'intermédiaire des deux rails. Le conducteur MP est
alors soumis à la force de Laplace qui le fait déplacer. Le sens de cette force appliquée sur
le conducteur mobile est donné par la règle des trois doigts de la main droite telle que :
Pouce (dirigé dans le sens du champ magnétique B
Index (dirigé dans le sens de la force F
Majeur (dirigé dans le sens de l’intensité i)
Cette expérience montre comment un conducteur peut être soumis à un mouvement de
translation.
Dans un moteur à courant continu, les conducteurs sont solidaires d'un rotor mobile autour
d'un axe fixe, ils sont donc soumis à un mouvement de rotation.
Principe d'un moteur à courant continu à aimant permanent
V Réversibilité
Le circuit inducteur étant alimenté, la machine à courant continu :
- fonctionne en génératrice (dynamo) si on fait tourner l'induit par un procédé
d'entraînement. Elle transforme alors l'énergie mécanique en énergie électrique;
- fonctionne en moteur si on alimente l'induit par une source de courant continu. Elle
transforme alors l'énergie électrique en énergie mécanique.
Ce double rôle confère à la machine à courant continu le caractère de réversibilité.
Selon le signe de la puissance absorbée, la machine peut fonctionner en moteur ou en
génératrice. On définit alors quatre quadrants de fonctionnement :
Manuel de cours
164
Leçon B1-1
Chapitre B1
Présentation d’un moteur
à courant continu
Par exemple lors d'un déplacement horizontal (cas d'un train), la machine fonctionne :
- à l'aller, en moteur dans le quadrant 1;
- puis au retour, toujours en moteur dans le quadrant 3;
- entre ces deux cas, le ralentissement forcé jusqu'à l'arrêt s'effectue dans le deuxième
quadrant pour l'aller et dans le quatrième quadrant pour le retour.
VI Inversion du sens de rotation
Réaliser l'activité 1 du manuel d'activités du TP B1- 1
VI- 1- Cas d'un moteur à électroaimant
Pour inverser le sens de rotation de ce type de moteur, on inverse, soit le sens du courant
dans l'induit soit le sens du courant dans l'inducteur.
VI- 2- Cas d'un moteur à aimant permanent
Pour inverser le sens de rotation de ce type de moteur, on inverse le sens du courant dans
l'induit.
Manuel de cours
165
Leçon B1-1
Chapitre B1
Présentation d’un moteur
à courant continu
VII Modélisation : représentation fonctionnelle niveau A- 0
1) Cas d'une génératrice
2) Cas d'un moteur
3) Symbôles de la machine à courant continu : (en mode moteur)
a- Moteur à électroaimants
Manuel de cours
166
Leçon B1-1
Chapitre B1
Présentation d’un moteur
à courant continu
b- Moteur à aimant permanent
VIII Plaque signalétique du moteur
Réaliser l'activité 2 du manuel d'activités du TP B1- 1
La plaque signalétique spécifie les caractéristiques de fonctionnement nominal (régime pour
lequel le constructeur garantit un fonctionnement normal du moteur). On trouve sur la plaque
signalétique les différentes informations dont notamment :
- puissance nominale;
- vitesse nominale;
- tension et courant d'induit ;
- tension et courant d'excitation ;
- etc.…
Exemple
Plaque signalétique d'un moteur à courant continu LEROY SOMER :
Manuel de cours
167
Leçon B1-1
Présentation d’un moteur
à courant continu
Chapitre B1
IX Exercices à résoudre
Exercice1
On dispose de différentes machines dont on a reproduit les plaques signalétiques.
Indiquer celle qui correspond à une machine à courant continu.
Plaque N° 1 : 220V / 380V - 50 Hz : 100 V - 0.3A
1500 trs /min - 1.3A / 0.75 A - 0.3 KW
Excitation séparée
Plaque N° 2 : 220V / 380V - 50 Hz : 100 V - 0.3A
1440 trs /min - 1.75A / 1 A - 0.3 KW
Cos = 0.66
Plaque N° 3 : Excitation séparée : 220V - 0.2 A
Induit : 220 V - 2.2 A - 1500 trs/min - 0.3 KW
Exercice 2
Un ohmmètre placé sur la plaque à bornes d'un moteur à courant continu à excitation
séparée (schéma ci- dessous) donne les indications portées dans le tableau ci- contre.
A partir de l'indication de l'ohmètre, idientifier les bornes de l'induit.
A
B
Entre A et B : 2 Ohms
Entre A et C : infini
plaque à bornes
C
D
Entre B et D : infini
Entre C et D : 300 Ohms
Exercice 3
On veut faire un essai sous tension variable d'un moteur à courant continu à excitation
indépendante dont les caractéristiques sont les suivantes :
induit : 220 V - 1.5 A ; inducteur : 220 V - 0.4 A
On dispose de 4 alimentations pour alimenter induit et inducteur dans un même montage.
Dans le tableau ci-contre, quelle est l'alimentation qui permet d'alimenter l'inducteur et celle
de l'induit ?
Manuel de cours
168
Leçon B1-1
Chapitre B1
Présentation d’un moteur
à courant continu
Tension continue fixe 220V - 1 .8 A
Tension continue réglable 0/ 220V - 1.8 A
Tension triphasé réglable 220V / 380V - 2 A
Tension continue réglable 0/ 30V - 2.5 A
Exercice 4
La mesure de la résistance de l'induit d'un moteur à courant continu à l'arrêt est réalisée
de la façon suivante.
Sous tension continue nominale
Sous tension alternative nominale
Sous tension continue réduite
Avec un courant de l'ordre du courant nominal
A l'aide d'un ohmmètre numérique
En appliquant la méthode voltampère métrique
- Préciser la ou (les) méthode(s) qui convient. (conviennent).
Manuel de cours
169
Leçon B1-2
Chapitre B1
Etude d’un moteur à courant continu
FICHE DE PREPARATION
O bjectif du programme
- Déterminer les grandeurs électriques et mécaniques d'un moteur à
courant continu.
O bjectifs de la leçon
- Vérifier expérimentalement l'existence de la force contre électromotrice
- Justifier la nécessité d'un rhéostat de démarrage
- Etablir le bilan des puissances
P rérequis
- lois de Laplace
- Modélisation d'un moteur à courant continu
C onnaissances nouvelles
- Force contre électromotrice
- Schéma équivalent
- Bilan des puissances
C onditions de réalisation et moyens
- Banc d'essai d'un moteur à courant continu
- Appareils de mesures électriques
C ritères d’évaluation
- La fcém est correctement mise en évidence
- La nécessité du rhéostat de démarrage est justifiée
- Le bilan des puissances est correctement établi.
Manuel de cours
170
Leçon B1-2
Chapitre B1
I
Etude d’un moteur à courant continu
Force contre-électromotrice
Réaliser l'activité 1 du manuel d'activités TP B1- 2
I- 1- Expression de la f.c.é.m
a- cas d'une génératrice
Lorsque le rotor est entraîné, les conducteurs qu'il porte se trouvent dans à un champ
magnétique, chaque conducteur est le siège d'une force électromotrice élémentaire.
La valeur moyenne E de la f.é.m produite par les conducteurs est proportionnelle :
- à la vitesse de rotation n du rotor ;
- au flux
maximal du champ magnétique crée par l'inducteur et enlacé par la spire formée
par deux conducteurs diamétralement opposés de l'induit ;
- au nombre total N de conducteurs de l'induit.
E=Nn
- E : f.é.m. en V
- N : nombre total de conducteurs de l'induit
- n : vitesse de rotation en tours par seconde (tr/s)
: flux inducteur en webers (Wb)
b- cas d'un moteur
Le rotor est en rotation, les conducteurs qu'il porte se trouvent dans à un champ
magnétique (comme pour le cas d'une génératrice), ils sont le siège d'une f.c.é.m. induite
notée E' et appelée force contre électromotrice. Sa valeur est donnée par la relation :
E’ = N n
II
- E’ : f.c.é.m. en V
- N : nombre total de conducteurs de l'induit
- n : vitesse de rotation en tours par seconde (tr/s)
: flux inducteur en webers (Wb)
Schéma équivalent à l'induit du moteur à courant
continu
L'induit, en rotation, se comporte comme un récepteur actif ayant le schéma équivalent
suivant où :
Manuel de cours
171
Leçon B1-2
Etude d’un moteur à courant continu
Chapitre B1
-
Ra est la résistance des enroulements de l'induit ;
E' est la force contre électromotrice ;
I est le courant traversant l'induit ;
U est la tension du réseau appliquée aux bornes de l'induit.
La loi d'Ohm appliquée à l'induit donne :
U = E' + RaI avec
U en Volts (V)
Ra en Ohms ( )
I en Ampères (A)
E' f.c.é.m en Volts (V)
Réaliser l'activité 2 du manuel d'activité TP B1- 2.
III Problème de démarrage
Au moment de démarrage, la vitesse de rotation est nulle ; la f.c.é.m E' l'est aussi. Toute
la tension U appliquée à l'induit est donc instantanément portée aux bornes de la résistance
totale du circuit d'induit Ra. Il s'en suit donc un très fort courant au démarrage de valeur:
U
Idd =
(dd signifie démarrage direct)
Ra
Ra étant faible, cette valeur du courant peut engendrer la détérioration du bobinage de
l'induit par échauffement excessif.
Afin de limiter ce courant de démarrage à une valeur supportable par l'ensemble des
constituants (source d'énergie, lignes de transport, semi- conducteurs du convertisseur,
machine,…) plusieurs procédés de démarrage peuvent être utilisés :
a- rhéostat de démarrage
Ce procédé consiste à augmenter la résistance totale du circuit d'induit au moment
du démarrage en insérant un rhéostat de résistance appropriée en série avec l'induit. Au fur
et à mesure que la vitesse du moteur augmente sa fcém E' augmente,
on diminue alors la valeur de la résistance
de ce rhéostat de démarrage.
U
Rh =
Id
Ra
En pratique Id est de l'ordre 1.5 à 2 fois le
courant nominal.
Manuel de cours
172
Leçon B1-2
Etude d’un moteur à courant continu
Chapitre B1
b- alimentation sous tension réduite
Il est également possible de faire
démarrer progressivement le moteur
sous
une
tension
réglable
jusqu'à
atteindre le régime de fonctionnement
nominal. Ceci peut être obtenu à l'aide
d'un redresseur commandé à thyristor ou
d'un hacheur délivrant une tension
continue variable.
IV Vitesse de rotation
La loi d'Ohm appliquée à l'induit donne U = E' + RaI (1)
E' = N n
L'expression de la fcém :
Ce qui permet d'écrire :
n=
U- RaI
N
(2)
n est en tr/s
D'après cette expression on remarque que si le flux décroît la vitesse augmente. Si ce flux
devient très faible la vitesse prend une valeur trop excessive, ce qui risque de détériorer la
machine. Ce phénomène est connu sous le nom d'emballement.
ATTENTION : Il est extrêmement dangereux de réduire ou de couper l'alimentation de
l'inducteur lorsque l'induit est alimenté.
Pour éviter ce risque, on peut adopter la solution technologique suivante : un contact
centrifuge monté en série avec le circuit de l'induit coupe le courant de celui-ci dès que la
vitesse dépasse une certaine valeur limitée par le constructeur.
Ce risque n'existe pas pour un moteur à aimant permanent.
V Bilan énérgétique
V- 1- Puissance absorbée
> Cas d'un moteur à électroaimant
Manuel de cours
173
Leçon B1-2
Etude d’un moteur à courant continu
Chapitre B1
- Par l'induit P = U I
- Par l'inducteur p = uex iex
La puissance totale absorbée par le moteur (exprimée en Watts) est : Pa = P + p
U et I
: tension et courant de l'induit
uex et iex : tension et courant de l'inducteur
Pa = U I + uex iex
>Cas d'un moteur à aimant permanent
La puissance totale absorbée par le moteur se limite à celle absorbée par l'induit soit :
U et I
Pa = U I
: tension et courant de l'induit
V- 2- Puissance électrique utile Péu
La puissance électrique utile (notée : Péu) représente la puissance mécanique totale
développée par l'induit. Elle s'exprime en Watts (W)
Péu = E’ I
E’ : force continu électromotrice
I : courant induit
V- 3- Puissance mécanique utile Pu
La puissance utile (notée : Pu ) est la puissance mécanique disponible sur l'arbre du
moteur. Elle engendre un couple utile Tu en mN.
Pu = Pa -
Σ
des pertes = Tu.Ω
: Vitesse de rotation en rad /s
V- 4- Couple électromagnétique T
T=
Peu
=
E’ I
T est le couple électromagnétique en m.N
V- 5- Rendement η
η = Pu
Pa
Le rendement noté η s'exprime souvent en %
Manuel de cours
174
Leçon B1-2
Chapitre B1
Etude d’un moteur à courant continu
V-6- Mise en évidence des pertes
a- Moteur à aimant permanent
> Pertes joules induit : elles traduisent l'énergie électrique dissipée dans le bobinage
induit
- pjinduit = Ra I2
Ra : Résistance de l'enroulement de l'induit
> Pertes constantes
C'est la somme des pertes mécaniques par frottement et des pertes magnétiques par
courant de Foucault et par Hystérésis. Ces pertes sont supposées constantes quelque soit le
point de fonctionnement du moteur.
On les détermine par un essai à vide.
pc = U Iv = p0 ; Iv est le courant absorbé par l'induit lors de l'essai à vide. (Les pertes
joules à vide Ra Iv2 sont supposées négligeables devant pc )
> Couple de pertes
Pc
Tp =
=T - Tu Tp : Couple nécessaire pour vaincre les pertes constantes
b- Moteur à électroaimant
Manuel de cours
175
Leçon B1-2
Chapitre B1
Etude d’un moteur à courant continu
>Pertes joules inducteur ou d'excitation : Elles traduisent l'énergie dissipée dans
l'enroulement inducteur.
2
- pjinducteur = uex iex = r I ext
Résistance de l'enroulement inducteur (r)
Réaliser l'activité 3 du manuel d'activités TP B1- 2
VI Exercices résolus
Exercice 1
Iex
Un moteur à courant continu à excitation séparée, est alimenté par une source de tension
continue constante U = 200 V.
La résistance de l'induit est Ra = 0,1 . La puissance inducteur, nécessaire pour créer un flux
constant est Pex = 200 W.
Un essai à vide a donné :
I = Iv = 2 A
et nv = 1537 tr /min
Un essai en charge a donné
I = 50 A
n = 1500 tr/min
1) Donner le schéma électrique équivalent à l'induit du moteur en régime permanent.
2) Etablir la relation qui relie la f.c.é.m du moteur en fonction de la vitesse angulaire .
3) Quel essai faut- il réaliser pour déterminer les pertes constantes pc ? Calculer ces pertes.
4) Calculer le couple de pertes Tp dû aux pertes constantes à 1500 tr/min .
5) Etablir l'expression du moment du couple électromagnétique T en fonction du courant I
absorbé par l'induit du moteur.
6) Calculer le moment du couple utile Tu lors du fonctionnement en charge ( on supposera
que le moment du couple de pertes Tp = 2,48 m.N = cte .
7) Calculer le rendement du moteur pour le fonctionnement en charge.
Solution
1) Le schéma équivalent de l'induit en régime permanent est :
Manuel de cours
176
Leçon B1-2
Etude d’un moteur à courant continu
Chapitre B1
2) E'= N n
= 2π n
or
n=
2π
On remplace n par son expression on
obtient :
E’ =
2
π
N
E’ =
N
2π
3) C'est l'essai à vide qui peut déterminer les pertes constantes pc.
à vide la puissance absorbée par l'induit est : Pv = U Iv = pc + R2a Iv
A.N : pc = 200 x 2 - 0,1 x 4 = 399,6 W
4)
Tp =
Pc
399,96
=
2πx
1500
= 2,55 Nm
pc = U Iv - Ra Iv
2
2
Tp = 2,55 Nm
60
5)
T=
T=
E’ I
N
2
π
or E’=
N
2
π
Remplaçons E' par son expression on obtient :
I
T=
N
2
π
I
6) Tu = T - Tp
Appliquons la loi d'ohm aux bornes du moteur : U = E' + Ra I d'où E' = U - Ra I
N
N
A.N : E' = 200 - 0,1 x 50 = 195 V or E’ =
=Kx
avec k =
2 π
2 π
A.N : K =
195
2πx
1500
= 1,24
60
D’où T = K x I; A.N : T = 1,24 x 50 = 62 N.m
Alors Tu = T - Tp ; A.N : Tu = 62 - 2,48 = 59,52 N.m
Manuel de cours
177
Leçon B1-2
Etude d’un moteur à courant continu
Chapitre B1
7) Rendement du moteur
=
Pu
Pa
A.N = 59,52 x 2
avec Pu = Tu x
πx
et Pa = U I + Pex
1500
60
= 9350 W ; Pa = 200 x 50 + 200 = 10200 W
= 0,92 Soit 92%
Exercice 2
Enoncé
La plaque signalétique d'un moteur à courant continu indique :
Pu = 36,3 kW
n = 1150 tr/min
U = 440V
I = 95,5A
Calculer le couple utile, la puissance absorbée et le rendement.
Réponse
Pu = Cu . Ω et Ω = 2 π n/60 = 120,4 rd/s
D'où : Cu = Pu/ Ω = 36,3.103 / 120,4 = 301,4 Nm
Pa = U.I = 440.95,5 = 42kW
Rendement = Pu/Pa = 36,3kW/42kW = 0,86 = 86%
VII Exercices à résoudre :
Exercice 1:
Un moteur à courant continu à excitation
séparée, est alimenté par une source de tension
continue constante U = 220 V.
La résistance de l'induit est Ra = 0,15 Ω . La
puissance inducteur, nécessaire pour créer un
flux constant est Pex = 240 W. Les pertes
collectives valent 380W
Un essai en charge a donné : I = 50 A n =
1500 tr/min
Calculer
1) la f.c.é.m du moteur pour la valeur du
courant donné ci- dessus.
2) La puissance absorbée.
3) La puissance électrique utile
4) La puissance utile
5) le rendement
6) le couple utile
7) Etablir le bilan des puissances
Manuel de cours
178
Leçon B1-2
Chapitre B1
Etude d’un moteur à courant continu
Exercice 2 :
Un moteur à courant continu à aimant permanent, est alimenté par une source de
tension continue constante U = 220 V.
La résistance de l'induit est Ra = 0,25 Ω . Les pertes totales valent 350W
Un essai en charge nominale a donné I = 17 A n = 1800 tr/min
Calculer
1) la f.c.é.m du moteur pour la valeur du courant donné ci- dessus.
2) La puissance absorbée.
3) La puissance électrique utile
4) La puissance utile
5) le rendement
6) le couple utile
7) Etablir le bilan des puissances
Manuel de cours
179
Chapitre B2
Le moteur pas à pas
Le moteur pas à pas
Leçon B2- 1
I
II III IV V VI VII VIII -
Manuel de cours
Mise en situation
Constitution
Principe de fonctionnement
Différents modes de commande d'un moteur pas à pas
Caractéristiques
Commande d'un moteur pas à pas
Exercices résolus
Exercices à résoudre
180
Leçon B2-1
Chapitre B2
Le moteur pas à pas
FICHE DE PREPARATION
O bjectifs du programme
- Identifier un moteur pas à pas dans un système technique.
- Mettre en œuvre un moteur pas à pas et simuler son fonctionnement.
O bjectifs de la leçon
- Cabler une partie d'une maquette de commande d'un moteur pas à pas.
- Vérifier le fonctionnement du moteur pas à pas.
- Simuler le fonctionnement d'un moteur pas à pas.
P rérequis
- Caractéristiques d'un aimant permanent.
- Exploitation d'une documentation technique
C onnaissances nouvelles
- Commande d'un moteur pas à pas
- Utilisation d'un moteur pas à pas
C onditions de réalisation et moyens
- Maquette à base du circuit intégré SAA 1027 associé à un moteur
pas à pas.
- Oscilloscope à mémoire + GBF.
- Maquette à base de bascules associée à un moteur pas à pas.
C ritères d’évaluation
- Le câblage de la maquette est correct.
- Le fonctionnement est validé.
- La simulation du fonctionnement d'un moteur pas à pas est réussie.
Manuel de cours
181
Leçon B2-1
Chapitre B2
Le moteur pas à pas
I Mise en situation
Activité de découverte.
Réaliser l'activité de découverte du manuel d'activités TP B 2-1
1) Introduction
Le moteur pas à pas est un actionneur qui convertit, à travers une carte de commande,
des impulsions d'horloge en une rotation sous forme de pas angulaires proportionnelles.
Associé à un mécanisme, le moteur pas à pas lui permet donc un positionnement précis.De
nombreuses applications industrielles utilisent les moteurs pas à pas telles que :
- en robotique : servomécanismes
- en micromachine: micro tour, micro fraiseuse,….
- en micro- informatique : lecteurs de disquettes, disque dur, imprimantes, tables traçantes
…etc.
- dans le domaine médical : pousse seringue,…….
2) Modélisation
W .électrique
Impulsions
électriques
Réglage
Convertir
Ordre de commande
Pas angulaires
Moteur pas à pas
3) Symbole
M
4) Chaîne de commande
La chaîne de pilotage d'un moteur pas à pas se traduit par le schéma fonctionnel suivant :
H
Carte de commande
Manuel de cours
Amplification
182
Moteur pas à pas
Chapitre B2
Leçon B2-1
Le moteur pas à pas
II Constitution
Un moteur pas à pas est constitué d' :
- une partie fixe appelée stator constitué généralement de plusieurs paires de pôles formés
chacun d'une bobine appelé phase. Ces bobines seront traversées par un courant pour
produire un champ magnétique ;
- une partie tournante appelé rotor constitué d'aimants permanents.
On distingue trois types de moteurs pas à pas :
- moteur à aimant permanent ;
- moteur à réluctance variable ;
- moteur hybride.
Manuel de cours
183
Chapitre B2
Leçon B2-1
Le moteur pas à pas
III Principe de fonctionnement
On s'intéressera à l'étude d'un moteur pas
à pas à aimant permanent dont le principe
est basé sur la règle du flux maximal.
Règle de flux maximal
Si on alimente une bobine à noyau de fer
par un courant continu, le pôle nord est celui
indiqué par le pouce de la main droite quand
les autres doigts entourent la bobine dans le
sens du courant.
Les moteurs pas à pas exploitent le principe d'attraction de deux pôles magnétiques
opposés et la répulsion de deux pôles magnétiques de même nom. Dans cet exemple si
on alimente l'enroulement A, le rotor se positionne devant cet enroulement, le même
phénomène se reproduit pour les trois autres enroulements B,C et D .
IV Différents modes de commande d'un moteur pas à pas
1) Mode à pas entier
a- Commutation unidirectionnelle symétrique
C'est la commutation qui s'opère sans changement de sens du courant dans chaque
enroulement en alimentant le même nombre de phase par pas pendant un tour.
Manuel de cours
184
Chapitre B2
Leçon B2-1
Le moteur pas à pas
Exemple 1 :
alimentation d'une seule bobine
A chaque pas, on n'alimente qu'une seule
phase. C'est la manière la plus simple, mais
aussi la moins efficace car le moteur ne
développe pas un couple important.
Les différentes positions du rotor
Exemple 2 :
alimentation de deux bobines à la fois.
A chaque pas, on alimente deux phases
à la fois, ce qui permet au moteur de
développer un couple plus élevé.
Manuel de cours
185
Chapitre B2
Leçon B2-1
Le moteur pas à pas
Les différentes positions du rotor
Réaliser l'activité 1 du manuel d'activités TPB- 2 .
Ce type de moteur est appelé moteur unipolaire
b- Commutation bidirectionnelle symétrique
Cette commutation nécessite le changement du sens du courant dans chaque
enroulement en utilisant le même nombre de phase par pas pendant un tour.
Exemple 1 : alimentation d'une seule bobine
Exemple 2 : alimentation de deux bobines à la fois
Ce type de moteur est appelé moteur bipolaire
Manuel de cours
186
Chapitre B2
Leçon B2-1
Le moteur pas à pas
2) Mode demi pas
a- Commutation unidirectionnelle asymétrique
Elle permet de doubler la précision du
moteur, mais le couple devient irrégulier
puisque la commutation est asymétrique.
Manuel de cours
187
Leçon B2-1
Chapitre B2
Le moteur pas à pas
b- Commutation bidirectionnelle asymétrique
V Caractéristiques
a- Nombre de pas par tour (Np/t)
Le nombre de pas par tour du moteur pas à pas dépend du :
- nombre de phases du moteur (m) ;
- nombre de pôles du rotor (2p) ;
- type de commutation unipolaire ou bipolaire (K1) ;
- mode de fonctionnement symétrique ou asymétrique (K2).
Np/t = m . p . K1 . K2
avec
m : Nombre de phases
K1 = 1 commutation
unidirectionnelle
K2
p : Paire de pôles du rotor
K1
K2 = 1 commutation
symétrique
K2 = 2 commutation
asymétrique
K1 = 2 commutation
bidirectionnelle
L'écart angulaire d'un pas est l'angle balayé par un pôle du rotor pendant un pas.
PN Ω ( en rd/s) = 2 . / Np
Ω (en degrés/s) = 360° / Np/t
Remarque : - si le moteur est unipolaire on a alors Np/t = m . p
- si le moteur est bipolaire on a alors Np/t = 2. m . p
{
Manuel de cours
188
Chapitre B2
Leçon B2-1
Le moteur pas à pas
b- Vitesse
La vitesse d'un moteur pas à pas dépend de la fréquence des impulsions d'horloge.
f
n=
Np/tr (n en tr/s et f en Hz)
c- Sens de rotation
Pour inverser le sens de rotation d'un moteur pas à pas il faut inverser l'ordre de la
séquence de commutation.
d- Couple moteur
T= P/ 2 n
T en Nm
P en w
n en tr/s
Réaliser l'activité 2 du manuel d'activités TPB- 2- 1.
VI Commande des moteurs pas à pas
a- Etage de puissance :
Il est constitué par des :
- transistors en commutation ;
- phases du moteur pas à pas ;
- diodes de protection.
Exemple 1
Moteur unipolaire 4 phases
Manuel de cours
189
Leçon B2-1
Chapitre B2
Le moteur pas à pas
Exemple 2
Moteur bipolaire 2 phases
b- Etage de commande
La commande de l'étage de puissance peut se faire selon les commutations des
transistors de la façon suivante :
b1- moteur unipolaire
Variante 1 :
commande en mode pas entiers, une seule phase alimentée est à la fois, sens anti - horaire.
Position
T1
T2
T3
T4
1
1
0
0
0
2
0
0
1
0
3
0
1
0
0
4
0
0
0
1
1
4
2
3
Variante 2 :
commande en mode pas entiers, deux phases sont alimentées en même temps
(augmentation du couple moteur), sens anti-horaire.
Position
T1
T2
T3
T4
1
1
0
1
0
2
0
1
1
0
3
0
1
0
1
4
1
0
0
1
Manuel de cours
190
1
4
2
3
Leçon B2-1
Chapitre B2
Le moteur pas à pas
Variante 3 : commande en mode demi - pas (double le nombre de pas par tour), sens anti-horaire
Position
T1
T2
T3
T4
1
1
0
0
0
2
1
0
1
0
3
0
0
1
0
4
0
1
1
0
5
0
1
0
0
6
0
1
0
1
7
0
0
0
1
8
1
0
0
1
1
2
8
7
3
4
6
5
b2- moteur bipolaire
Variante 1 : commande en mode pas entiers, sens anti - horaire
Position
T1
T2
T3
T4
T’1
T’2
T’3
T’4
1
1
1
0
0
1
1
0
0
2
0
0
1
1
1
1
0
0
3
0
0
1
1
0
0
1
1
4
1
1
0
0
0
0
1
1
1
4
2
3
Variante 2 : commande en mode demi - pas, sens anti- horaire.
Position
T1
T2
T3
T4
T’1
T’2
T’3
T’4
1
1
1
0
0
1
1
0
0
2
0
0
0
0
1
1
0
0
3
0
0
1
1
1
1
0
0
4
0
0
1
1
0
0
0
0
5
0
0
1
1
0
0
1
1
6
0
0
0
0
0
0
1
1
7
1
1
0
0
0
0
1
1
8
1
1
0
0
0
0
0
0
Manuel de cours
191
1
2
8
7
3
4
6
5
Chapitre B2
Leçon B2-1
Le moteur pas à pas
c- Commande des moteurs pas à pas par circuit intégré SAA1027.
SAA1027
Réaliser l'activité 3 du manuel d'activités TPB- 2- 1.
Manuel de cours
192
Leçon B2-1
Chapitre B2
Le moteur pas à pas
VII Exercices résolus
Exercice 1
Etude d’un moteur pas à pas.
Le moteur est relié à une alimentation asymétrique. Il fait 8 pas par tour. Ses bobines sont
commutées par des transistors bipolaires comme le montre la figure suivante :
1) Mettre une croix devant la bonne réponse :
Type de commande :
Bidirectionnelle …..
Unidirectionnelle …..
Mode de pas
:
Pas entier ………...
Demi pas ……………
2) Calculer l'écart angulaire (α)
3) Pour une rotation dans le sens trigonométrique, compléter le tableau donnant
l'ordred'alimentation des bobines du moteur sur un tour complet.
Angle (°)
0°
45°
90°
135°
180°
225°
270°
315°
Bornes
reliées
au +Vcc
Solution
1) Mettre une croix devant la bonne réponse :
Type de commande :
Bidirectionnelle …..
Mode de pas
:
Pas entier ………...
Unidirectionnelle ..
Demi pas …………
2) Calculer l'écart angulaire (a): a = 360/8 = 45°
3) Pour une rotation dans le sens trigonométrique, compléter le tableau donnant l'ordre
d'alimentation des bobines du moteur sur un tour complet.
Angle (°)
0°
45°
90°
135°
180°
225°
270°
315°
Bornes
reliées
au +
1
(1) - (3)
(3)
(3) - (2)
(2)
(2) - (4)
(4)
(4) - (1)
Manuel de cours
193
Chapitre B2
Leçon B2-1
Le moteur pas à pas
Exercice 2
Un moteur pas à pas à aimant permanent possède les caractéristiques suivantes :
4 pôles au stator, 6 pôles au rotor, commutation unidirectionnelle symétrique, puissance
nominale 40w, vitesse de rotation 300tr/ mn. Déterminer :
a) le nombre de pas par tour.
b) l'écart angulaire.
c) la fréquence mécanique (fm en (Np/S))
d) le coupe moteur.
Solution
a) le nombre de pas par tour est.
N pas / tour =m.p.k1.k2 = 4. 3. 1. 1 =12 pas / tr
b) l'écart angulaire est .
360
α = 360 = 12 = 30°
Npas/tr
c) la fréquence mécanique est.
fm = n. Npas/tr = 360 .12 = 60 (P/s)
60
d) le coupe moteur est .
C = P = 40 . 60
= 1,2 Nm
Ω
6,28.300
VIII Exercices à résoudre
Exercice 1
Soit le montage suivant représentant un moteur pas à pas à aimant permanent.
Le moteur peut commuter de la façon suivante :
(A) ; (A , B) ; (B) ; (B , C) ; (C) ; (C , D) ; (D) ; (D , A).
a) Donner le nombre de pas par tour et la commutation correspondante.
Manuel de cours
194
Chapitre B2
Leçon B2-1
Le moteur pas à pas
Exercice 2
Un moteur pas à pas à aimant permanent comporte deux phases au stator insérées dans
un circuit électronique formé par des transistors fonctionnant en commutation. Le rotor est un
aimant bipolaire symbolisé par une flèche. Les bases des transistors sont connectées à un
circuit de commande non représenté.
Figure 1
1) Pour avoir un pas de 90° et une rotation dans le sens trigonométrique, on alimente les
phases une par une.
Reproduire puis compléter le tableau suivant :
Pas
0
Sens du
courant I1
Position du rotor
1
1’
Sens du
courant I2
Transistors
saturés
Nul
T1 et T4
1
2
3
4
2) On désire avoir un pas de 45° pour ceci on alimente alternativement une puis deux phases
à la fois.
Reproduire puis remplir le tableau suivant en gardant le même sens de rotation que
précédemment.
Manuel de cours
195
Leçon B2-1
Chapitre B2
Le moteur pas à pas
Pas
Sens du
courant I1
Position du rotor
0
1
1’
1
1
1’ 2
2
3
4
5
6
7
8
Exercice 3
Le schéma du moteur pas à pas est le suivant :
a- Reproduire puis compléter le tableau suivant :
Phases excitées
Position
D
C
B
A
1
1
0
0
1
2
3
4
Manuel de cours
196
Sens du
courant I2
Transistors
saturés
Nul
T1 et T4
2’
T1 - T4
Chapitre B2
Leçon B2-1
Le moteur pas à pas
b) Quel est le type de la commutation?
c) Quel est le type du moteur ?
d) Déterminer le nombre de pas par tour ?
e) Reproduire puis compléter le tableau indiquant la séquence de commutation pour que
le moteur tourne dans le sens contraire :
D
C
B
A
1
0
0
1
Manuel de cours
197
Chapitre C
LES AMPLIFICATEURS
LINEAIRES INTEGRES
Leçon C1-1
Présentation d’un amplificateur linéaire integré
I- Mise en situation
II- Introduction
III- Généralités
Montages fondamentaux a base
d’amplificateurs linéaires intergrés
Leçon C1-2
IIIIIIIVVVI-
Manuel de cours
Mise en situation
Montages en régime linéaire
Montages en régime non linéaire
Domaines d'utilisation
Exercices résolus
Exercices à résoudre
198
Leçon C-1
Chapitre C
Présentation d’un amplificateur
linéaire intégré
FICHE DE PREPARATION
O bjectif du programme
- Choisir, en se référant à un document constructeur, un A.L.I.
O bjectifs de la leçon
- Vérifier expérimentalement la fonction amplification
- Identifier un composant par :
- les symboles normalisés ;
- les caractéristiques d'un A.L.I. réel puis celles d'un A.L.I. idéal ;
- la caractéristique de transfert d'un A.L.I. réel et celle d'un A.L.I. idéal ;
- le schéma équivalent d'un A.L.I. réel et celui d'un A.L.I. idéal.
P rérequis
- lois de Kirchhoff .
- Amplification par transistor.
C onnaissances nouvelles
- Caractéristiques d'un A.L.I.
- Fonction amplification réalisée par un montage à base d'A.L.I.
C onditions de réalisation et moyens
- Micro- ordinateur + logiciels de simulation analogique
- Maquettes, montages expérimentaux et appareils de mesures
électriques .
C ritères d’évaluation
- Vérification expérimentale de la fonction amplification par un A.L.I.
réussie.
- Caractéristiques, représentation des symboles et schémas
équivalents d'un A.L.I. correctement identifiés.
Manuel de cours
199
Leçon C-1
Chapitre C
Présentation d’un amplificateur
linéaire intégré
I Mise en situation
Activité de découverte
Réaliser l'activité de découverte du manuel d'activités TP C1- 1 .
II Introduction
Les amplificateurs opérationnels sont nés au début des années 60 où on a commencé
à intégrer plusieurs transistors et résistances sur le même substrat de silicium. Cette
technologie a permis de bâtir des montages complexes et de les faire tenir sur une petite
plaquette de silicium encapsulée dans un boîtier (généralement à 8 broches) commode à
l'emploi.
Exemple de structure
interne d'un amplificateur
opérationnel.
Avec ces circuits intégrés, on a eu accès à des amplificateurs simples d'utilisation et à
mise en œuvre facile moyennant quelques composants annexes (résistances,
condensateurs...) ; les caractéristiques des montages obtenus ne dépendent quasiment plus
de l'amplificateur opérationnel lui même, mais uniquement des composants passifs qui
l'accompagnent, ce qui garantit une bonne fiabilité du résultat.
Les amplificateurs opérationnels ont beaucoup progressé depuis leur création, et
tendent maintenant à devenir très proches de l'amplificateur idéal.
Ces amplificateurs opérationnels appelés encore A.L.I.(Amplificateur Linéaire Intégré)
permettent de réaliser des fonctions mathématiques (addition, soustraction, intégration...)
dans les calculateurs analogiques.
Manuel de cours
200
Leçon C-1
Chapitre C
Présentation d’un amplificateur
linéaire intégré
III Généralités
III- 1- Exemple d'un amplificateur linéaire intégré
Le circuit intégré utilisé est du type μA741 ou TL081 comportant 8 bornes.
Brochage
Identification des bornes
1
2
3
4
5
6
:
:
:
:
:
:
Réglage du décalage en tension (offset).
Entrée inverseuse E- .
Entrée non inverseuse E+ .
Polarisation négative VEE ou - VCC.
Réglage du décalage en tension (offset).
Sortie VS.
7 : Polarisation positive + VCC.
8 : Non connecté NC.
Les deux entrées d'offset sont conçues pour recevoir un résistor, de résistance variable,
permettant le réglage de façon à obtenir une tension de sortie nulle en absence d'un signal
d'entrée.Certains amplificateurs linéaires intégrés ne possèdent pas de réglage externe de
l'offset.
III- 2- Symboles
III- 3- Polarisations
Par une source de tension continue
(polarisation asymétrique).
Par une source de tension continue
à point milieu (polarisation symétrique).
Réaliser l'activité 1 du manuel d'activités TP C1- 1.
Manuel de cours
201
Leçon C-1
Présentation d’un amplificateur
linéaire intégré
Chapitre C
III- 4- Caractéristiques d'un amplificateur linéaire intégré
Amplificateur réel
Amplificateur idéal
- Tension différentielle d'entrée très faible en
boucle fermée ud = VE+ - VE- Amplification différentielle simple élevée :
Ads = us/ud (de l'ordre de 105).
- Impédance d'entrée différentielle élevée :
Ze
- Impédance de sortie très faible: ZS
- Courant de décalage très faible
-Tension différentielle d'entrée nulle en boucle
fermée ud = VE+ - VE- = 0
- Amplification différentielle infinie :
Ads = us/ud =
- Impédance d'entrée différentielle infinie:
Ze =
- Impédance de sortie nulle : ZS = 0
- Courant de décalage nul : i+ = i- = 0
III- 5- Shéma équivalent d’un amplificateur linéaire intégré.
Amplificateur réel
Manuel de cours
Amplificateur idéal
202
Leçon C-1
Chapitre C
Présentation d’un amplificateur
linéaire intégré
III- 6- Caractéristiques de transfert d'un amplificateur linéaire
intégré
Amplificateur réel
Amplificateur idéal
L'allure de la caractéristique de transfert de
l'amplificateur linéaire intégré montre :
- la zone 1 où la tension de sortie us
de l'amplificateur linéaire intégré évolue
entre les valeurs - Vsat = -Vcc et +Vsat =+Vcc
Dans cette zone l'A.L.I fonctionne en
régime linéaire ;
- les zones 2 et 3 où la tension de sortie us
reste constante telle que us = +Vsat ou
bien us = - Vsat
Dans ces deux zones l'A.L.I. fonctionne en
régime saturé.
Grâce à la technologie avancée, les
amplificateurs linéaires intégrés ont
beaucoup progressé depuis leur création,
et tendent maintenant à devenir très
proches des amplificateurs linéaires
intégrés idéaux (parfaits) ce qui permet de
conclure ce qui suit :
- si ud > 0, us = +VCC ;
- si ud < 0, us = - VCC
Cas de tensions de polarisation non
symétriques : - VCC est remplacée par VEE
Réaliser l'activité 2 du manuel d'activités TP C1- 1.
Manuel de cours
203
Leçon C1-2
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Chapitre C
FICHE DE PREPARATION
O bjectifs du programme
- Identifier les différents types de montages mettant en œuvre les
A.L.I.
- Réaliser et étudier des montages à base d'A.L.I.
O bjectifs de la leçon
- Etudier expérimentalement les fonctions :
* amplification avec et sans inversion ;
* comparaisons de deux tensions ;
* sommation et soustraction de deux tensions.
- Etudier théoriquement des montages réalisant ces fonctions.
P rérequis
- Lois de Kirchhoff.
- Caractéristiques d'un A.L.I. réel et idéal .
C onnaissances nouvelles
- Réalisation des fonctions amplification, sommation et soustraction
à base d'A.L.I.
- Etude théorique d'un montage à base d'A.L.I. en utilisant les lois
de KIRCHHOFF.
C onditions de réalisation et moyens
- Micro- ordinateur + logiciels de simulation analogique.
- Maquettes, montages expérimentaux et appareils de mesures
électriques.
C ritères d’évaluation
- Etude expérimentale des fonctions amplification, addition
soustraction réalisées par un montage à base d'A.L.I. réussie.
- Etude théorique d'un montage à base d'A.L.I. correcte.
Manuel de cours
204
Leçon C1-2
Chapitre C
I
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Mise en situation
Système technique: Banc de Contrôle Industriel
Ci après le schéma structurel de la carte de commande du système de tri type BCI
Carte de commande du moteur convoyeur à bande.
Manuel de cours
205
Leçon C1-2
Chapitre C
II
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Montages en régime linéaire
L'Amplificateur Linéaire Intégré est très utilisé dans le domaine de l'électronique pour
réaliser les fonctions d'amplification, d'opérations arithmétiques, de filtrage, d'adaptation, de
redressement ou de comparaison.
Selon le mode de câblage, l'A.L.I. fonctionne en régime linéaire ou en régime saturé. Un
amplificateur linéaire intégré fonctionne en régime linéaire lorsqu'une partie du signal de
sortie est réinjectée à l'entrée inverseuse E- , ce mode de fonctionnement est encore appelé
en boucle fermée.
II- 1- Amplificateur inverseur
a- Activité de travaux pratiques
Réaliser l'activité 1 du manuel d'activités du TP C1- 2..
b- Etude théorique
Oscillogrammes ue(t), us(t).
Schéma de montage d'A.L.I.
Données technologiques :
- R1 = 1KΩ ; 0,5W ; - R2 = 5KΩ , 0,5W ;
- A.L.I. : μA741;
- ue(t) : signal triangulaire de 2V crête à crête
de fréquence 50Hz ;
- ± VCC = ± 12V ;
Propriétés :
- ue(t) est un signal triangulaire de 2V
crête à crête ;
- us(t) est un signal triangulaire de 10V
crête à crête ;
- ue(t) et us(t) ont même forme et même
fréquence 50Hz, mais elles sont en
opposition de phase ;
- us(t) = AV ue(t).
L'amplificateur linéaire intégré est idéal : ud = 0, i+ = i- = 0
L'application des lois de Kirchhoff permet d'écrire :
- la loi des nœuds appliquée à l'entrée inverseuse donne i1 = - i2 ;
Manuel de cours
206
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
- la loi des mailles donne :
* maille 1
* maille 2
us - R2.i2 = 0
ue - R1.i1 = 0
us = - R2.i1 ;
ue = R1.i1
R
R
u
d'où us = - 2 . ue L'amplification en tension est donc Av = s = - 2
R1
R1
ue
Remarque
- Si R2 = R1 alors le montage est dit inverseur ;
- Si R2 > R1 alors le montage est dit amplificateur inverseur ;
- Si R2 < R1 alors le montage est dit atténuateur inverseur.
II- 2- Amplificateur non inverseur
a- Activité de travaux pratiques
Réaliser l'activité 2 du manuel d'activités du TP C1- 2 .
b- Etude théorique
Schéma de montage d'A.L.I.
Oscillogrammes ue(t), us(t).
Données technologiques :
- R1 = 1K Ω ; 0,5W ; - R2 = 4KΩ , 0,5W ;
- A.L.I.
μA741;
- ue(t) = 1sin( t) ;
Propriétés :
- ue(t) = 1sin( t) ;
- ue(t) = 4sin( t) ;
- ue(t) et us(t) ont même forme et même
fréquence 50Hz, mais elles sont en
opposition de phase ;
- us(t) = AV us(t).
- ± VCC = ± 12V.
Manuel de cours
207
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
L'application des lois de Kirchhoff permet d'écrire :
- la loi des nœuds appliquée à l'entrée inverseuse donne i1 = i2
- la loi des mailles donne
* maille 1
* maille 2
d'où us = R1 + R2
R1
us - R2.i2 - R1.i1 = 0
ue - R1.i1 = 0
us = (R2+ R1) .i1
ue = R1.i1
R
. ue = (1 + 2 ). ue
R1
u
R
L'amplification en tension est donc Av = s = 1 + 2
ue
R1
II- 3- Suiveur de tension
a- Activité de travaux pratiques
Réaliser l'activité 3 du manuel d'activités du TP C1- 2.
b- Etude théorique
Oscillogrammes ue(t), us(t).
ue(t), us(t) sont identiques
Schéma de montage d'A.L.I.
L'application des lois des mailles donne us - ue = 0
us = ue
u
l’amplification en tension est Av = s = 1
ue
Ce montage est utilisé en aval des générateurs de tension quand on ne veut pas les faire
débiter du courant. Il est nommé adaptateur d'impédance.
Manuel de cours
208
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
II- 4- Amplificateur sommateur inverseur
Etude théorique
Oscillogrammes ue1(t),
Schéma de montage d'A.L.I.
ue2(t), us(t).
L'application des lois de Kirchhoff permet d’écrire :
- la loi des noeuds donne i = i1 + i2 et is = - i ;
- la loi des mailles donne
* maille 1 :
us + R3.i = 0
us = - R3 .i
Equation 1
* maille 2 :
ue1 - R1.i1 = 0
i1 = ue1
R1
* maille 3 :
ue2 - R2.i2 = 0
i2 = ue2
R2
R
R
Remplaçons i1 et i2 par leurs expressions dans1on obtient us = - ( 3 . ue1 + 3 . ue2).
R2
R1
Si R1 = R2 = R3 = R, l'expression de us devient us = - (ue1 + ue2).
Ce montage est appelé sommateur inverseur.
Manuel de cours
209
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
II- 5- Sommateur
Etude théorique
Manuel de cours
210
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
II- 6- Amplificateur soustracteur
Etude théorique
Schéma de montage d'A.L.I.
Oscillogrammes ue1(t), ue2(t), us(t).
L'application des lois de Kirchhoff permet d’écrire :
- la loi des nœuds appliquée à l'entrée inverseuse donne i1 = - is ;
- la loi des mailles donne
* maille 1 : us + R3.is - R4. i2 = 0
us = R4. i2 + R3.is
* maille 2 : ue2 - (R2 + R4).i2 = 0
i2 =
* maille 3 : ue1 - R1.i1 - R4. i2 = 0
ue2
R2+R4
Equation 3
Remplaçons i2 par son expression dans 3, on obtient
(R + R4).ue1 - R4.ue2
i1 = 2
R1.(R2 + R4)
Remplaçons i1 et i2 par leurs expressions dans 1, on obtient
R .R
R .R
R
us = 1 4 + 3 4 .ue2- 3 .ue1
R1.(R2 + R4)
R1
Si R1 = R2 = R3 = R4 = R, l'expression de us devient us = ue2 - ue1
Ce montage est appelé amplificateur différentiel ou soustracteur.
Manuel de cours
211
Equation 1
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
III Montages en régime non linéaire
Un amplificateur linéaire intégré fonctionne en régime
non linéaire (saturé), lorsqu'il est en boucle ouverte.
Le principe de fonctionnement de cet amplificateur
consiste à comparer un signal d'entrée (ue) à une tension
de référence (Uréf).
Dans ce régime de fonctionnement, l'amplificateur
linéaire intégré est appelé comparateur.
La tension us bascule vers +VCC lorsque ud est
positive ou vers - VCC lorsque ud est négative. Sachant
que us = Ads.ud on a :
us = + VCC (état stable) ;
Si ud > 0
us = - VCC (état stable) ;
Si ud < 0
us = 0V (état instable) c'est une zone de
Si ud = 0
commutation.
a- Activité de travaux pratiques
Réaliser l'activité 5 du manuel d'activité du TP C1- 2
b- Etude théorique
Si
Si
ue > Uref alors ud > 0
us = +VCC
ue < Uref alors ud < 0
us = - VCC
Selon la valeur de la tension d'entrée, supérieure ou
inférieure à la tension de référence, le comparateur
prendra l'une ou l'autre des valeurs +Vsat ou - Vsat en
sortie..
IV Domaine d'utilisation des amplificateurs linéaires intégrés
Généralement, les amplificateurs linéaires intégrés sont utilisés dans les circuits
électroniques tels que :
- capteurs électroniques de pression et de température (fonction conversion U/I ou I/U) ;
- postes de télévision et radio (fonction amplification) ;
- carte de commande des moteurs à courant continu dans un système asservi (CNA est un
Convertisseur Numérique / Analogique) ;
- voltmètre, multimètre électroniques et oscilloscope numérique (CAN est un Convertisseur
Analogique / Numérique).
Manuel de cours
212
Leçon C1-2
Chapitre C
V
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Exercices résolus
Dans tous les exercices les A.L.I sont supposés idéaux.
Exercice :
Soit le montage suivant :
Déterminer l'expression de us(t) en fonction de ue(t) puis donner un nom à ce montage.
Solution
d’où ue = R .ie
soit ie = ue
La maille 1 permet d’écrire ue - R.ie = 0
R
La maille 2 permet d’écrire us - R.is = 0
d’où
us = R .is
soit is = us
R
Au noeud N on peut écrire ie + is = 0 d’où is = - ie
En remplaçant ie et
us = - ue soit
R
R
is par leurs expressions tirées des équations aux mailles, on obtient
us = - ue . Le montage étudié joue le rôle d'un inverseur.
Exercice 2
Soit le montage suivant :
Manuel de cours
213
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
1) Déterminer l'expression de us(t) en fonction de ue(t) et x sachant que VCC = 5V.
2) Tracer us(ue) pour x = 1. Identifier les trois zones d'utilisation du montage.
Solution
1) Expression de us(t) :
La maille (1) permet d'écrire ue - R.ie = 0
d’où
u
ue = R .ie soit ie = e
R
La maille (2) permet d'écrire us - R.is - x.R.is = 0 d’où us = (1 + x)R .is
Au nœud N on peut écrire ie + is = 0 d’où is = - ie
soit is = us
R(1+x)
En remplaçant ie et is par leurs expressions tirées des équations précédentes, on obtient :
us
u
=- e
soit us(t) = - (1 + x)ue(t)
R(1+x)
R
2) Courbe de us(ue) pour x = 1
Exercice 3
Soit le montage suivant :
Manuel de cours
214
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
1) Déterminer l'expression de us(t) en fonction de ue(t) et x
Solution
u
La maille (1) permet d'écrire ue - R.iS = 0 d’où ue = R .iS soit iS = e
R
La maille (2) permet d'écrire us - x.R.is- R.is = 0 d’où us = (1 + x)R .is
ue
R(1+x) U = (1 + X)u
u
= d'où us =
= s
s
e
R
R
R(1+x)
soit is =
Le montage étudié joue le rôle d'un Amplificateur non inverseur
Exercice 4
Soit le montage suivant :
Déterminer l'expression de :
1) V+(t) en fonction de u1(t) et u2(t) ;
2) V- (t) en fonction de us(t) ;
3) Sachant qu'en régime linéaire ud = 0, montrer que us(t) = u1(t) + u2(t).
Solution
Manuel de cours
215
us
R(1+x)
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
1) Expression de V+(t) en fonction de u1(t) et u2(t)
u - V+
a- Expression du courant i1(t) : i1 = 1
R
b- Expression du courant i2(t) : i2 =
u2 - V+
R
(1)
(2)
c- Au nœud N on peut écrire : i1 + i2 = 0
L'addition membre à membre des (1) et (2) donne :
u2 - V+
u1 - V+
u1 + u2
+
= 0 soit u1 + u2 - 2V+ = 0 d’où V+ =
R
R
2
2) Expression de V- (t) en fonction de us(t)
u - Va- Première expression du courant is(t) : is = s
R
Vb- Deuxième expression du courant is(t) : is =
R
c- En égalisant les deux expressions, on obtient
us
soit us = 2V- d’où V- =2
(1)
(2)
us - V- V=
R
R
3) 1- Expression de us(t) en fonction de u1(t) et u2(t)
a- En boucle fermée ud(t) = 0 or ud(t) = V+ – V- soit V+ = Vb- En égalisant les expressions des réponses (1- c) et (2- c), on obtient :
us = u1 + u2
d’où us = u1 + u2
2
2
Exercice 5
On considère le montage de la figure cijointe.
1) Quelle est la fonction réalisée par ce
montage amplificateur ?
2) Exprimer V3 en fonction de V1, V2 et des
coefficients K1 et K2.
3) Quelle est la relation entre K1 et K2 pour
que Vs = K.(V2 - V1) ?
Manuel de cours
216
Leçon C1-2
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Chapitre C
Solution
1) L'amplificateur linéaire intégré réalise la différence (soustraction) entre les tensions V1 et
V2.
2) Expression de V3.
L'application de la loi des mailles permet d'écrire :
V2
i2 =
* maille 1 : V2 - (K2.R2 + R2).i2 = 0
R2.(1+K2)
* maille 2 : V1 - R1.i1 - R2.i2 = 0
Remplaçons i2 par son expression
V2
V1 1+K2
1
.V = 0
i1 =
V1 - R1.i1 1+K2 2
R1
=
(1+K2).V1- V2
R1.(1+K2)
* Maille 3: V3 + K1.R1. i1 - R2.i2 = 0
V2
(1+K2).V1- V2
Remplaçons i1 et i2 par leurs expressions : V3 + K1.R1.
- R2.
R2.(1+K2)
R1.(1+K2)
1+K1
.V2 - K1.V1
V3 =
1+K2
3) Relation entre K1 et K2
Faisant l'égalité des deux expressions de Vs
1+K1
1+K1
K.(V2 - V1) =
.V2 - K1.V1
K.V2 - K.V1 =
.V2 - K1.V1
1+K2
1+K2
K=
1+K1
1+K2
1+K1
D'où 1+K
2
1 + K1 = K1.(1 + K2)
= K1
soit K2K1 =1 donc K1 =
1
K2
Exercice 6
L'amplificateur linéaire intégré utilisé dans le
montage de la figure ci- jointe est alimenté sous ±
12V.
1) Tracer Vs en fonction de Ve.
2) La tension Ve est sinusoïdale d'expression ve(t) =
10.sin100
t. Tracer ve(t) et vs(t) sur le même
graphique.
Manuel de cours
217
1 + K1 = K1 + K1 K2
=0
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Solution
Tracé de us = f(ue).
Le montage de la figure ci-jointe est un
comparateur car l'A.L.I fonctionne en boucle
ouverte.
Pour tracer us = f(ue), il faut :
- Calculer Vréf.
Appliquons la formule du pont diviseur de tension,
Uréf = 10R = 5V
2R
- Définir les signes de la tension différentielle
Si ue > Uréf, alors ud < 0
us = - Vcc = - 12V
Si ue < Uréf, alors ud > 0
us = +Vcc = +12V
2) Pour pouvoir tracer us, il faut tracer Uréf = 5V.
Remarque :
La tension de sortie ne peut prendre que deux
valeurs +12V et - 12V, correspondantes aux
tensions de saturation.
VI
Exercices à résoudre
Exercice 1
En appliquant les lois de Kirchhoff, établir l'expression numérique de la tension de sortie en
fonction de tension d'entrée pour chacun des montages suivants.
Déduire l'amplification en tension et la fonction réalisée par chaque montage.
Manuel de cours
218
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Exercice 2
Dans un laboratoire d'électronique, on dispose d'un système de tensions AC et DC. Une
somme ne s'obtient pas par simple mise en série, donc on a recours au montage de la figure
ci- dessous.
L'amplificateur linéaire intégré utilisé dans le montage est alimenté sous ± 12V.
1)
2)
3)
4)
5)
Exprimer Vs en fonction de VEExprimer VE+ en fonction de V1, V2, R1 et R2.
Déduire l'expression de Vs en fonction de V1 et V2, sachant que R1= 10K et R2 =20K
Que réalise ce montage ?
Sachant que v1 = 1,2.sin314t [V] et V2 = 1,8V (DC). Tracer les courbes v1(t), V2 et vs(t)
sur le même repère.
Exercice 3
La figure ci- dessous représente un comparateur simple.
1) Quel est le régime de fonctionnement de l'amplificateur ?
2) Etablir l'expression de la tension différentielle Vd en fonction de Ve et Vréf
3) Tracer sur papier millimètré la caractéristique de transfert Vs = f(Vd).
4) Sur votre cahier, représenter graphiquement, les variations de la tension Vs en fonction
du temps. ve(t) et Vréf sont représentées sur la figure.3.31.
Manuel de cours
219
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Exercice 4
Soit le montage suivant
Déterminer l'expression de :
1) V- (t) en fonction de u1(t), u2(t) et us(t) ;
2) V+(t) ;
3) Sachant qu'en régime linéaire ud =0, montrer que us(t) = – (u1(t) + u2(t)).
Manuel de cours
220
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
Savoir plus
LM741
Amplificateur opérationnel
Description générale
Les LM741 sont des amplificateurs opérationnels d'application générale qui ont de
meilleures performances que le standard industriel comme le LM709. Ils sont compatibles
broche à broche avec le 709C, le LM201, et les MC1439 et 748 et peuvent les remplacer dans
la plupart des applications. Ces amplificateurs offrent de nombreux avantages qui les
protègent contre pratiquement toutes les erreurs de manipulation, protection contre les
surcharges sur les entrées et les sorties, pas de verrouillage lorsqu'on sort de la plage de
tensions en mode commun et absence d'oscillation.
Les LM741C/LM741E sont identiques aux LM741A excepté que leur plage de
températures est de 0°C à +70°C au lieu de - 55°C à +125°C.
Valeurs limites : (LM741/LM741A)
- Tension d'alimentation 22 V
- Tension différentielle d'entrée 30 V
- Tension d'entrée 15 V
- Durée d'un court- circuit sur la sortie continu
- Plage de température de fonctionnement - 55°C à +125°C
- Plage de température de stockage - 65°C à +150°C
- Température d'une broche (soudage, 10 s) 300°C
Valeurs limites : (LM741E)
- Tension d'alimentation 22 V
- Tension différentielle d'entrée 30 V
- Tension d'entrée 15 V
- Durée d'un court- circuit sur la sortie continu
- Plage de température de fonctionnement 0°C à +70°C
- Plage de température de stockage - 65°C à +150°C
- Température d'une broche (soudage, 10 s) 300°C
Valeurs limites : (LM741C)
- Tension d'alimentation 18 V
- Tension différentielle d'entrée 30 V
- Tension d'entrée 15 V
- Durée d'un court-circuit sur la sortie continu
- Plage de température de fonctionnement 0°C à +70°C
- Plage de température de stockage- 65°C à +150°C
- Température d'une broche (soudage, 10 s) 300°C
Manuel de cours
221
Leçon C1-2
Chapitre C
MONTAGES FONDAMENTAUX A BASE
D'AMPLIFICATEURS LINEAIRES INTEGRES
LM709
Amplificateur opérationnel
Description générale
Les séries LM709 sont des amplificateurs opérationnels monolithiques destinés à des
applications générales. La plage de tensions de fonctionnement est celle couramment utilisée
pour ce type d'amplificateur. Sa structure, tout en assurant un gain élevé, réduit la tension de
décalage et le courant de polarisation. De plus, l'étage de sortie de classe B offre de grandes
possibilités tout en réduisant au minimum la puissance consommée.
La compensation en fréquence de l'amplificateur est réalisée par des composants externes.
Le réseau de compensation au gain unité conseillé procure une très bonne stabilité à
l'amplificateur dans toutes les configurations de réaction, et cette compensation peut être
calculée pour obtenir le meilleur fonctionnement possible à hautes fréquences et pour un gain
quelconque.
L'amplificateur est construit sur un seul élément de silicium, ce qui permet une faible dérive
de la tension de décalage ainsi qu'une faible dérive en température. La dérive due aux
variations de température à proximité du boîtier est également négligeable.
Le LM709C est la version industrielle et commerciale du LM709. Il est identique au
LM709/LM709A sauf qu'il est prévu pour fonctionner dans une plage de températures de 0°
à 70°C.
Valeurs limites :
LM709/LM709A LM709C
- Tension d'alimentation ±18 V
- Puissance dissipée (Note 1) 300 mW 250 mW
- Tension différentielle d'entrée ±5 V
- Tension d'entrée ±10 V
- Durée d'un court- circuit sur la sortie (TA = 25°C)5 s
- Plage de températures de stockage - 65° à +150°C
- Plage de températures des fonctionnements - 55° à +125°C
- Température d'une broche <300°C (soudage, 10 secondes)
Manuel de cours
222
SOMMAIRE
Activités
Pages
A- AUTOMATIQUE
A1- Système de numération et codes
A1-1- Les codes numériques
A1-2- Les codes alphanumériques
A2 - La logique combinatoire
A2-1- Système combinatoire
A2-2- Les circuits combinatoires
A3- Logique séquentielle
A3-1- Les bascules
A3-2- Application à base de bascules
A3- Logique séquentielle (suite)
A3-3- GRAFCET
A3-4- Les Séquenceurs
A4- Les microcontrôleurs
A4-1- Présentation d'un microcontrôleur
A4-2- Mise en œuvre d’une application a base de microcontrôleurs
A5- Asservissements linéaires
A5-1- Notions d'asservissements linéaires
6
7
21
28
29
45
53
54
69
77
78
99
113
114
121
145
146
B- ELECTROTECHNIQUE
B1- Les moteurs à courant continu
B1-1- Présentation d'u moteur à courant continu
B1-2- Etude d'un moteur à courant continu
B2- Le moteur pas à pas
B2-1- Le moteur pas à pas
159
160
170
180
181
C- ELECTRONIQUE
C1- Les amplificateurs linéaires intégrés
C1-1- Présentation d'un A.L.I.
C1-2- Les Montages fondamentaux à base d'A.L.I.
198
199
204
BIBLIOGRAPHIE
-
Techniques numériques par Roger Tok heim
Technologie d’électricité par Henri Ney
Physique appliquée par René Moreau et Robert Merat.
Electronique digitale par Pierre Cabanis
Cours d’électricité 3ème Année TST
Technologie 2ème Année Sciences
Le chapitre A4 portant sur les microcontroleurs est élaboré en collaboration avec messieurs :
Ali Zitouni : Inspecteur
Abdel Aziz Kilani : Professeur Universitaire
223