TP Moteur à courant continu: Modélisation et Asservissement

TP 04.1 Moteur à courant continu (Did'Acsyde) Page 1/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 14/11/2010
TP 04.1 Moteur à courant continu
(Did'Acsyde)
1) Objectifs du TP et sommaire.
Il est proposé dans ce TP de mettre en évidence :
- la modélisation d’un moteur à courant continu (schéma-bloc et fonction de transfert global),
- l’effet d’une perturbation,
- la correction d’un système (asservissement).
1) OBJECTIFS DU TP ET SOMMAIRE............................................................................................................ 1
2) MODÉLISATION GÉNÉRALE D’UN MOTEUR À COURANT CONTINU................................................... 1
3) RÉPONSE À UN ÉCHELON DE TENSION D’UN MOTEUR RX120L PERTURBÉ PAR UN COUPLE
RÉSISTANT. ..................................................................................................................................................... 2
31) DONNÉES...........................................................................................................................................................2
32) RECHERCHE DE (+) PAR LE CALCUL.........................................................................................................3
33) RECHERCHE DE (+) À L’AIDE DU LOGICIEL DID’ACSYDE........................................................................3
34) CONCLUSION.....................................................................................................................................................3
4) ASSERVISSEMENT EN VITESSE............................................................................................................... 3
41) CONSTRUCTION D’UNE ENTRÉE EN RAD/S ET D’UN TRANSDUCTEUR.....................................................4
42) CONSTRUCTION D’UNE BOUCLE DE RETOUR AVEC UN CAPTEUR............................................................4
43) CHOIX D’UN CORRECTEUR..............................................................................................................................4
2) Modélisation générale d’un moteur à courant continu.
Un moteur à courant continu est considéré comme un système tel que :
- l’entrée est la tension de commande de l’induit ()
m
ut,
- la sortie est la vitesse de rotation de l’arbre moteur ()t.
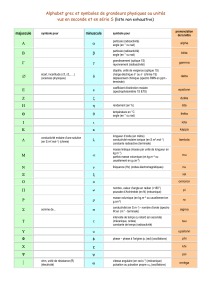
Le modèle électrique du moteur à courant continu vous est proposé ci-dessous.
L’induit peut être matérialisé par une
résistance en série avec une inductance
et une force contre-électromotrice.
Les équations qui modélisent le fonctionnement du moteur sont les suivantes :
Loi d'Ohm dans le circuit d'induit : ()
() () ()
mdi t
ut et Rit Ldt
(1)
Équations de l’électromagnétisme dans le moteur : () (t)
() (t)
e
mc
et K
ct Ki
(2)
(3)
L R
e(t)
i(t)
um(t)
(t), cm(t)
J, f, cr(t)

TP 04.1 Moteur à courant continu (Did'Acsyde) Page 2/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 14/11/2010
Équation de la dynamique de l'arbre moteur : ()
() () ()
mr dt
ct ct f t J dt
(4)
Avec :
um (t) est la tension d’alimentation (V)
i(t) est le courant consommé (A)
e(t) est la tension contre-électromotrice (V)
R est la résistance de l’induit ()
L est l’inductance de l’induit (H)
Ke est le coefficient de fcem (V/(rad/s))
(t) est la vitesse de rotation de l’arbre moteur (rad/s)
cm(t) est le couple exercé par le moteur (N.m)
cr(t) est le couple résistant sur l’axe moteur (N.m)
f est le paramètre de frottement “fluide” total (N.m/(rad/s))
J est le moment d’inertie totale / l’axe moteur (kg.m2)
Kc est la constante de couple (N.m/A)
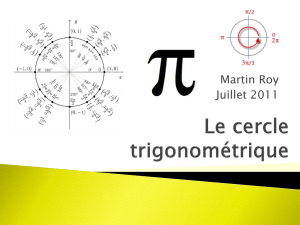
Question 1 : Les conditions initiales étant nulles, écrire les transformées de Laplace des équations (1) à
(4) ci-dessus. En déduire les 4 fonctions de transfert du schéma-bloc ci-dessous. Enfin,
compléter ce schéma-bloc.
NB : ce schéma-bloc ne représente pas un système asservi
mais seulement la modélisation d’un moteur à courant continu.
la boucle de retour n’est pas une boucle d’asservissement.
3) Réponse à un échelon de tension d’un moteur
RX120L perturbé par un couple résistant.
31) Données.
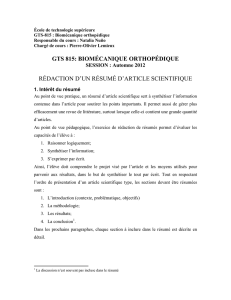
On souhaite simuler le comportement d’un moteur RX 120L (dont les caractéristiques sont données
dans le tableau constructeur ci-dessous). Pour cela, on le soumet à :
- un échelon de tension Um0 (10 V) sans retard (TUm = 0 s),
- un échelon de couple résistant Cr0 (0,3 N.m) retardé d’un temps TCr (0,1 s).
NB : On prendra comme paramètre de frottement « fluide » total f = 0,01 N.m/(rad/s).
CARACTERISTIQUES
(40°C ambiant)
Couple permanent
en rotation lente
Vitesse nominale
Puissance nominale
Tension nominale
Courant permanent
en rotation lente
Courant maximum
en rotation lente
F.E.M par 1000 tr/min
(25°C)
Couple par ampère
(25°C)
Résistance induit
(25°C)
Inductance
Inertie
Constante de temps
mécanique
Constante de temps
thermique
Charge axiale
admissible
Charge radiale
admissible à mi-
lon
g
ueur de l’arbre
Masse
SYMBOLE M0 Nn Pn Un I0 Imax Ke Kc R L J m th Fa* Fr* M
UNITE N.m tr/min W V A A V N.m/A mH 10-5kg.m2 ms min daN daN kg
RX 120 L 0,3 3000 93 45,5 2,9 11,5 11,5 0,11 2,5 7,5 5 10,4 7,2 16 18 1,35
Attention aux unités du constructeur
par rapport aux unités des équations différentielles.
+ - +-
I(p)
r
Cp
()
p
E(p)
m
Cp
m
Up

TP 04.1 Moteur à courant continu (Did'Acsyde) Page 3/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 14/11/2010
32) Recherche de (+) par le calcul.
Question 2 : Exprimer de façon littérale la fonction de transfert ()0
()
()r
mCp
p
Up
(sans perturbation).
Exprimer de façon littérale la fonction de transfert ()0
()
()m
rUp
p
Cp
.
En déduire l’expression de ()
p
en fonction de ()
m
Up et ()
r
Cp (superposition des deux entrées).
Question 3 : Donner l’expression de ( ) lim ( )
tt
lorsque
0mm
ut U (constante) et
0rr
ct C (constante).
Question 4 : Vérifier que 0cm
KU et 0r
RC sont de même dimension, ainsi que Rf et ec
KK.
Question 5 : Faire l’application numérique pour les 2 valeurs de 0r
C (0 et 0,3 N.m).
33) Recherche de (+) à l’aide du logiciel Did’Acsyde.
Construire le schéma-bloc sur Did’Acsyde en prenant soin de laisser beaucoup d'espaces entre les
symboles, et, en utilisant le langage formel (c'est-à-dire les lettres ,, , ,
ce
RLK K fetJ pour les
coefficients à l'intérieur des blocs, les lettres 00
,,
m
mU r
UTC
et r
C
T pour les coefficients à l'intérieur des
entrées, et 1234
,,,,,
rm
HHHHCU et pour les noms des symboles) et non pas les valeurs numériques.
Cliquer dans le menu en haut de l'écran sur Analyse / Réponse temporelle.
- Pour ces calculs, le logiciel a besoin de variables intermédiaires sur quelques fils : nommer les n1, n2, n3,
- Valider la sortie par défaut [] proposée entre crochets,
- Rentrer les valeurs numériques de 00
,,,,,,,,
mr
mU rC ce
UTCTRLKKfetJ
, ainsi que l’horizon temporel 0,2 s.
Attention aux unités…
A l’aide du menu Choix cadre, afficher uniquement la courbe de sortie (t).
Déterminer, à l'aide de la commande Curseur, la valeur de la vitesse de rotation () en régime
permanent avant et après l'application du couple résistant Cr.
Question 6 : Comparer vos valeurs de () par rapport à celles déterminées par le calcul.
34) Conclusion.
Question 7 : Conclure au sujet de ce moteur ?
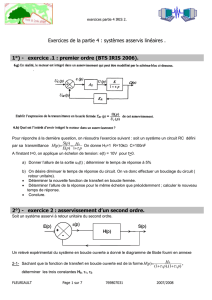
4) Asservissement en vitesse.
N(s)
D(s) N(s)
D(s)
N(s)
D(s)
N(s)
D(s)
N(s)
D(s)
N(s)
D(s) N(s)
D(s)
Wc H1 H2 n2
H4
C
r
n3 WH3
n1
cap
tran n4 cor
moteur
NB : la 1ère boucle de
retour (modélisant le
fonctionnement du
moteur) n’est pas une
boucle d’asservissement
alors que la seconde
l’est.
p
c
Up
mes
Up

TP 04.1 Moteur à courant continu (Did'Acsyde) Page 4/4
MPSI-PCSI Sciences Industrielles pour l’Ingénieur S. Génouël 14/11/2010
Un système asservi tient compte de l’effet de sa commande (si la consigne a été respectée ou non).
Sa conception nécessite une boucle de retour avec un capteur, un transducteur et un régulateur
(comparateur + correcteur). Voir schéma-bloc précédent.
Effacer tous les fichiers et répertoires placés à l’intérieur du répertoire « mes documents élève » situé
sur le bureau, à l’exception du répertoire « Digiview ».
Le schéma-bloc de cet asservissement de vitesse a déjà été réalisé avec le logiciel Did'Acsyde, sous le nom
de fichier "moteur asservi incomplet.sch" situé dans le répertoire SII Élève / TP SUP.
Copier ce fichier dans le répertoire « mes documents élève ».
Ouvrir ce fichier à l'aide du logiciel Did'Acsyde et non pas en double cliquant dessus...
41) Construction d’une entrée en rad/s et d’un transducteur.
Lorsque l’on envoyait 10 V à notre moteur en boucle ouverte dans la partie 3, on a pu remarquer, que :
- sans perturbation, celui-ci tourne à une vitesse de rotation d’environ 29,6 rad/s,
- avec perturbation, celui-ci tourne à une vitesse de rotation d’environ 9,4 rad/s.
Pour notre système asservi, lorsqu’il n’y a pas de perturbation, on souhaite donc obtenir 10
c
uV après le
transducteur pour une entrée consigne de 29,6 /
crad s .
Question 8 : Par conséquent que doit valoir la fonction de transfert du transducteur ?
42) Construction d’une boucle de retour avec un capteur.
Question 9 : Déterminer la fonction de transfert du capteur pour que ()
p
soit l’image en tension de
l’erreur en position () ()
c
p
p.
43) Choix d’un correcteur.
Étude à l’aide d’un correcteur proportionnel.
Nous allons étudier d’abord l’influence d’un correcteur proportionnel de fonction de transfert ()cor p K.
Déterminer pour une entrée de 30 rad/s, les réponses temporelles du moteur asservi pour plusieurs
valeurs de K : 1, 10, 50 et 100 sur le même graphe.
Question 10 : Conclure sur l’effet du gain K du correcteur proportionnel.
Étude à l’aide d’un correcteur intégral.
Nous allons étudier maintenant l’influence d’un correcteur intégral de fonction de transfert () K
cor p
p
.
Déterminer pour une entrée de 30 rad/s, les réponses temporelles du moteur asservi pour plusieurs
valeurs de K : 1, 10, 50 et 100 sur le même graphe.
Question 11 : Conclure sur l’effet du gain K du correcteur intégral.
Conclusion.
Question 12 : Choisir le meilleur correcteur pour ce moteur.
AVANT DE PARTIR, RANGER LE POSTE
1
/
4
100%