TP PET : Mesures et calculs d`incertitudes

Page 1
Alimentation linéaire vs Alimentation à découpage
Alimentation linéaire vs
Alimentation à découpage
Objectifs du TP
• Etude d’un redressement double alternance avec filtrage capacitif
• Etude d’un régulateur linéaire
• Etude succincte d’un régulateur à découpage
• Comparaison des caractéristiques et performances des régulateurs
I REDRESSEMENT ET FILTRAGE
I.1 Redresseur double alternance
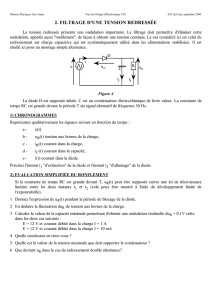
Le redresseur double alternance à 4 diodes (pont de Graëtz – voir figure 1) a été étudié en
cours. Se reporter à celui-ci pour des explications détaillées sur son fonctionnement.
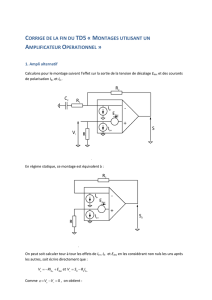
L’allure de la tension de sortie V2 du redresseur sans filtrage (i.e. lorsque la capacité de
filtrage Calim est nulle) est donnée figure 2, courbe en pointillés. Si tous les éléments
constitutifs sont supposés parfaits, la valeur moyenne de cette tension s’exprime de la façon
suivante :
ππ
eff
V
V
V1
1
2
22
ˆ
2== où eff
VetV11
ˆ
sont respectivement les valeurs crête et efficace de V1. On
pourra tenir compte de la chute de tension aux bornes des diodes lorsque celles-ci conduisent
en remplaçant
1
ˆ
V
par D
VV 2
ˆ
1
−
où VD est la tension seuil des diodes.
220V
50Hz
220V/9V
V
1
V
2
Calim Charge
variable
I
2
Figure 1
I.2 Filtrage de la tension de sortie
La capacité Calim permet de filtrer la tension de sortie V2. Lorsque l’ensemble débite dans
une charge un courant I2, la tension de sortie ondule et peut être décomposée en une
composante continue <V2> et une composante variable (ondulation ou « ripple » en anglais) :

Page 2
Alimentation linéaire vs Alimentation à découpage
V2=<V2>+ΔV2 (voir figure 2). Cette ondulation sera d’autant plus faible que la capacité de
filtrage sera grande et le courant de charge faible.
Figure 2
Pour calculer l’ondulation de tension en fonction de la valeur de la capacité de filtrage (et
ainsi dimensionner la capacité nécessaire) deux méthodes sont possibles.
● Le calcul approché
Lorsque l’ondulation de tension est faible (ce qui est généralement le cas), les instants t0 et t1
sont très proches de l’origine (voir figure 2) alors que l’instant t2 est proche de la demie
période T/2. Si de plus le courant de charge est à peu près constant, on peut faire l’hypothèse
d’une décharge à courant constant ICH de la capacité de filtrage sur une demie période, soit :
2/
lim 2
2TV
CaI ∆
≅
d’où
CHCH R
V
Ipuisque
CafR
V
Caf I
V2
2
2
2
2lim2lim2===∆
De plus :
lim41 lim4
2
ˆ
'
2
2
ˆ
1
2
2
12 CafR CafR
VV
V
oùd
V
VVV
CH
CH
D
D+
=
−
∆
−−>≅<
où VD est la tension de seuil d’une diode et f la fréquence du signal d’entrée
(
T
f1
2==
π
ω
=50Hz)
On peut définir le taux d’ondulation :
fCaR
V
V
VeffV
CH
lim34
1
32
1
2
2
2
2
=
><
∆
≅
><
∆
=
β
Attention : l’ondulation relative ΔV2 = V2max – V2min est différente de la valeur efficace de
cette ondulation qui sert à définir le taux d’ondulation, ici on fait l’hypothèse d’une
ondulation de courant quasi triangulaire ce qui conduit à écrire que
32
22
VeffV∆≅∆
.
● L’utilisation des abaques
Il est plus rapide et plus précis d’utiliser des abaques qui ont été tracées sans approximations
(ou d’utiliser un simulateur électrique qui donnerait les mêmes résultats). De tels abaques sont
donnés en annexe 1.
1
ˆ
V
2
T
V2
ΔV
2

Page 3
Alimentation linéaire vs Alimentation à découpage
La première (figure 10) permet de déterminer la valeur de <V2> en fonction de Calim à
1
ˆ
V
et
RCH donnés. La seconde courbe (figure 11) précise le taux d’ondulation toujours en fonction
de Calim. A noter que dans ces abaques ρ désigne la résistance série de l’ensemble diodes-
transformateur (on ajoute parfois volontairement une résistance de faible valeur
supplémentaire en série afin de limiter le courant crête circulant dans les diodes).
Les deux abaques qui suivent (figures 12 et 13) servent à estimer rapidement les courants
crêtes et efficaces circulant dans les diodes (et permettent un choix rapide des diodes).
I.3 Préparation
I.3.a : Cas d’une simple charge résistive (figure 5)
● Tracer sur l’abaque de la figure 10 bis du document réponse donnée en fin de texte la
courbe correspondant au calcul approché. Préciser pour quelles valeurs de (RCH Calim) le
calcul approché reste valable.
● Tracer sur la figure 11 le taux d’ondulation correspondant au calcul approché. Conclure à
nouveau sur la validité de ce calcul approché.
I.4 Mesures
On utilisera pour cette partie la maquette principale « Alimentations » nue. Alimenter la carte
à l’aide du bloc transformateur.
I.4.a : Sans capacité de filtrage (Calim=0)
● Sans charge (RCH=
∞
), visualiser à l’oscilloscope v1(t) et v2(t). En déduire les valeurs de
1
ˆ
V
et de VD (tension de seuil d’une diode).
● Pour RCH=
∞
puis pour RCH=50 Ω, visualiser v2(t) à l’oscilloscope. En déduire la valeur de
la résistance série ρ de l’ensemble (transfo+diode+Ralim).
I.4.b : Avec Calim
On placera sur la maquette successivement les 3 cavaliers équipés des 3 valeurs de Calim
● Relever <V2> et l’ondulation de ΔV2eff lorsque RCH=100 Ω pour les 3 valeurs de Calim
disponibles (préciser l’appareil utilisé - multimètre ou l’oscilloscope - et les réglages
effectués). Comparer aux valeurs théoriques données par les abaques.

Page 4
Alimentation linéaire vs Alimentation à découpage
II REGULATEUR LINEAIRE
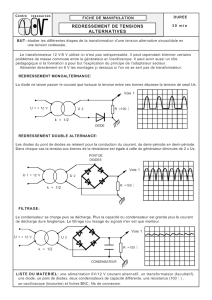
II.1 Rappels sur la diode zener comme référence de tension
Figure 3
La diode zener est une diode dont on utilise la caractéristique inverse. La tension zener VZ est
la tension inverse pour laquelle le courant inverse croît rapidement (figure 3).
La pente étant raide en polarisation inverse, on
néglige souvent Rz. La diode zener est alors
modélisée en inverse par une source de tension
parfaite Vz.
Le montage le plus simple pour fabriquer une
référence de tension est donné figure 4. Il faut
pour que la tension Vz soit stable que le courant
dans la diode zener ne s’annule pas quelque soit
IS.
II.2 Régulateur élémentaire avec
transistor ballast
Pour augmenter les performances en courant
tout en améliorant le rendement du système
lorsque le courant de sortie n’est pas
maximum, on ajoute un transistor « ballast » au
montage précédent (voir figure 5).
charge
Vz
R1 Is
Vin Vs
Figure 4
charge
Vz
R
Is
Vin Vs
Figure 5
ΔI
ΔV
V0
RZ= ΔV/ ΔI
VD
ID
VD
ID
VZ
IZ
RZ
VZ
Convention de
signe
habituellement
choisie en
fonctionnement
« zener »
Modèle
équivalent
lors d’un
courant
inverse

Page 5
Alimentation linéaire vs Alimentation à découpage
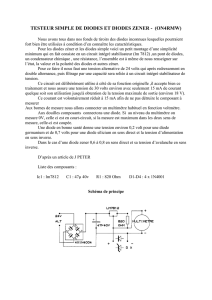
II.3 Régulateur linéaire intégré
Dans le régulateur linéaire, la sortie est stabilisée par un asservissement (mesure de la tension
de sortie Vs par le pont diviseur R1-R2,
comparaison à Vz et amplification de la
différence par l’amplificateur opérationnel
(voir figure 6). La tension de sortie est
ajustable à l’aide de R1 et R2 mais est
nécessairement plus élevée que Vz.
II.4 Travail de préparation
II.4.a : Régulateur élémentaire (figure 5)
On donne pour le transistor β=100 et
VBE=0,6V et pour la diode zener VZ=5,6V.
De plus on suppose que ISMax=0,25A et
VE=15V.
● Calculer la valeur de R maximum
nécessaire (on prendra une valeur moitié pour
la suite).
● calculer le rendement global en pleine charge (i.e. pour IS=ISMax).
● Quelle serait la valeur minimum de VE permettant de garantir une tension stable en sortie
pour IS= ISMax.
II.4.b : Régulateur intégré (figure 6)
● Exprimer VS en fonction de VZ, R1 et R2 si l’AOP est idéal.
II.5 Mesures
II.5.a : Régulateur élémentaire
Connecter le module contenant les alimentations linéaires à la carte mère précédente et
placer le commutateur sur la position « ballast ». Dans cette configuration, seule la partie
haute du module (correspondant au schéma de la figure 5) est alimentée. Les plots
« SHUNT » permettent de connecter un ampèremètre extérieur en série sur l’entrée. Les plots
Vs1 et GND permettent de connecter une charge en sortie (boîtes AOIP). On câblera en sortie
deux boites AOIP en parallèle ; l’une de 11x10Ω et l’autre de 11x100 Ω. On placera
Calim=220μF dans un premier temps. Attention à ne pas commuter les boîtes AOIP sur la
position « 0 » au risque de provoquer un court-circuit en sortie !!
● Faire le câblage complet du montage en prévoyant la mesure des courants et des tensions
moyennes en entrée et en sortie à l’aide de multimètres (faire un schéma de câblage).
● Faire varier la charge et régler Is à approximativement 100mA. Relever les courants et
tensions moyens et calculer le rendement global. Conclure.
● Pour Is=50mA, 100mA puis 200mA, mesurer à l’oscilloscope les valeurs moyennes et les
ondulations efficaces des tensions en entrée et en sortie avec l’aide des fonctions « measure »
de l’oscilloscope (expliquer les réglages et présenter les résultats dans un tableau). Calculer
les taux d’ondulation en entrée et sortie (rappel β=ΔVS1eff/<VS1>). Commenter.
● Pour Is=100mA mesurer l’évolution du taux d’ondulation en sortie lorsque Calim diminue
(placer successivement 220μF, 100 μF et 47 μF). Pour expliquer ce qu’il se passe on pourra
charge
Vz
R
Vin
Vs
Figure 6
R1 R2
+
-
 6
7
8
9
10
11
12
13
14
6
7
8
9
10
11
12
13
14
1
/
14
100%