Pilote automatique de bateau

CEM conversion électromécanique TP CEM 1.2 Pilote automatique
Lycée Jules Ferry Page 1 sur 7 TSI1
Moyens : Le système pilote automatique de bateau
Prérequis : le cours sur la conversion électromécanique d’énergie
Groupes : binôme
Durée : 1h30
Problème technique :
Quantifier le rendement des éléments du système ainsi que leurs réversibilités
L'étudiant doit
:
Mesurer les grandeurs couple et vitesse pour plusieurs modes de fonctionnement.
Etablir le sens de transfert de l’énergie.
Quantifier les énergies mises en jeu et en déduire le rendement.
TP CEM-1.2
Pilote automatique de bateau

CEM conversion électromécanique TP CEM 1.2 Pilote automatique
Lycée Jules Ferry Page 2 sur 7 TSI1
Problématique :
Partie 1 : Etudes des notes techniques (A compléter sur le DR1)
Q1-1 Identifier les constituants réalisant les fonctions techniques ALIMENTER, DISTRIBUER
CONVERTIR et TRANSMETTRE.
Q1-2 Identifier les grandeurs d’entrée et de sortie de la chaîne d’énergie. Plusieurs points de mesure sont
accessibles qui vont permettre de mesurer le rendement des fonctions.
Q1-3 Inscrire ces différents points sur l’analyse fonctionnelle sous la forme « mesure 1, mesure 2, … etc
». Indiquer quelle(s) information(s) est (sont) disponible(s) sur chacun d’eux.
Partie 2 : Étude mécanique mettant en évidence la réversibilité
A partir du document ressource en fin de TP « Notion de travail et de puissance » :
Q2-1 Dans le cas de l’exemple 1 (montée de la charge) : donner l’expression de la puissance mécanique
fournie par le poids Pcharge de la charge M se déplaçant à une vitesse constante V. Application numérique
: M = 20 kg, V = 0,1 m.s
-1
.
Q2-2 Même question dans le cas de l’exemple 2 (descente de la charge).
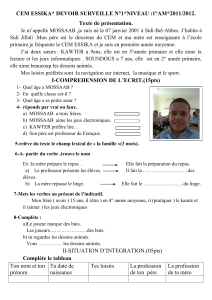
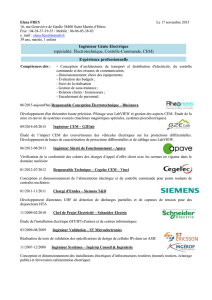
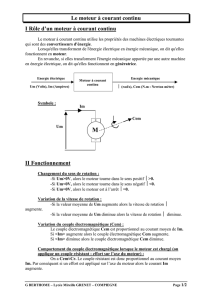
Pour suivre un cap de consigne en
pilotage manuel, ce barreur doit
constamment lire le cap suivi, indiqué
par le compas, et corriger l’orientation
du safran en fonction de l’écart
constaté.
S’il est seul expérimenté pour
manœuvrer, il doit également
intervenir de temps à autre sur le
réglage des voiles. Cette dernière
opération, à la fois complexe et
intuitive ne peut être automatisée
facilement.
Par contre, la prise en charge
automatique de la barre est possible et
permet alors au barreur de se consacrer
aux autres tâches de navigation sans
qu’il y ait perte de cap.
Le système d’aide à la navigation rend
donc service au barreur en agissant sur
l’orientation du safran pour maintenir le
bateau dans le cap de consigne.

CEM conversion électromécanique TP CEM 1.2 Pilote automatique
Lycée Jules Ferry Page 3 sur 7 TSI1
Q2-3 Que signifie le signe de ces puissances ?
Partie 3 : Étude énergétique pratique du pilote. Mise en évidence des sens de transfert
d’énergie.
Fonctionnement du pilote à vide (sans masse levée) :
Connecter un voltmètre numérique et une pince ampère métrique sur le moteur du pilote de façon à obtenir
une tension positive et un courant positif lors de la rentrée de la tige.
Q3-1 Mesurer la tension et le courant dans le moteur du pilote lors de la rentrée de la tige dans un premier
temps, puis lors de sa sortie.
Calculer dans chaque cas la puissance électrique consommée par le moteur (faire attention au signe des
paramètres mesurés). Celle-ci est-elle positive ou négative ?
Dans quel sens le transfert d’énergie s’effectue-t-il ?
Fonctionnement du pilote en charge :
Attacher au bout du câble, une masse de 20 kg qui sera levée par le pilote. On rappelle que le plateau au
bout du câble à une masse de 2,4 kg. Pour faciliter l’étude, le câble doit être tendu très rapidement, voire
en permanence.
Q3-2 Mesurer la vitesse de translation de la tige, la tension et le courant dans le moteur du pilote lors de la
montée de la masse dans un premier temps, puis lors de sa descente.
Calculer dans chaque cas la puissance électrique consommée par le moteur (faites attention au signe des
paramètres mesurés), et la puissance mécanique nécessaire à lever la masse (ou à la descendre). Celles-
ci sont-elles positives ou négatives ?
Dans quel sens le transfert d’énergie s’effectue-t-il ?
Détailler votre réponse.
Comparer la tension aux bornes du moteur avec la tension d’alimentation.
Q3-3 Que constate-t-on quant au signe du courant dans le moteur pour ses deux sens de rotation ?
Q3-4 Avec la même masse levée que pour les questions précédentes, mesurer la tension et le courant
d’alimentation du pilote pendant la rentrée puis la sortie de la tige. Calculer la puissance consommée par
le pilote dans les deux sens de translation de la tige et la comparer aux puissances mesurées
précédemment. Le pilote complet est-il réversible ?
Q3.5 Rentrer la tige du pilote au maximum, en charge, puis ne plus toucher au pilote (ne plus commander
ni la rentrée de la tige ni sa sortie). Qu’observe-t-on ?
Mesurer la tension aux bornes du moteur et le courant dans celui-ci, ainsi que la vitesse de la tige. Quelle
conclusion peut-on tirer de ces résultats quant au branchement du moteur ? Calculer la puissance
électrique consommée par le moteur et celle appliquée à la charge.
Q3.6 Déduire des résultats précédents quelles sont dans la chaîne d’énergie les fonctions réversibles ou
irréversibles.

CEM conversion électromécanique TP CEM 1.2 Pilote automatique
Lycée Jules Ferry Page 4 sur 7 TSI1
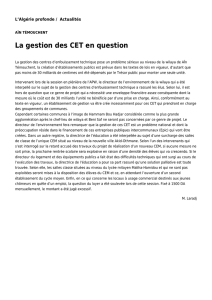
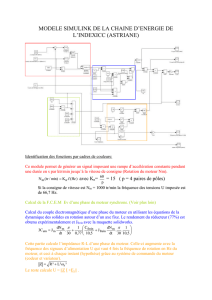
Document réponse DR1
Alimenter
Distribuer
Convertir
Convertir
Convertir
Transmett
re

CEM conversion électromécanique TP CEM 1.2 Pilote automatique
Lycée Jules Ferry Page 5 sur 7 TSI1
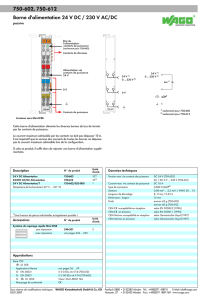
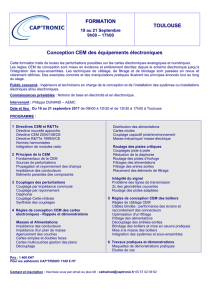
Document réponse DR1
Alimenter
Distribuer
Convertir
Convertir
Convertir
Transmett
re
 6
7
6
7
1
/
7
100%