® Correction DS no7

➤Correction DS no7
I Attraction gravitationnelle et satellites [d. CCP TSI 2010]
1) le r´ef´erentiel r´ef´erentiel
g´eocentrique RGa pour ori-
gine le centre de la Terre et trois
axes dirig´es vers trois ´etoiles fixes est
le .
Lois de K´epler : Cf. cours M7
2) Le satellite est soumis `a la force :
−→
f=m.−→
GT(M) = −GMT.m
r2−→
er
O
M (m)
MT
r
F
O M
=-GM .m er
T
r2
er =e
O M
G
T(M)=- GM er
T
r2
(RG)
D’apr`es le principe de l’action et de la r´eaction : −→
f′=−−→
f=GMT.m
r2−→
er
3) D’apr`es le th´eor`eme du moment cin´etique en Ofixe dans Rgalil´een :
d−→
LO/R(M)
dt!R
=MO(−→
f) = −−→
OM×−→
f=−→
0⇒−→
LO/R(M) = −−→
OM×−−−→
vM/R(=−→
Cte
⊥(−−→
OM, −−−→
vM/R)∀t
Donc −−→
OM et −−−→
vM/R(qui d´efinissent le mouvement) sont perpendiculaires `a une direction constante
de l’espace : le mouvement est donc contenu dans le plan perpendiculaire `a −→
LO/R
Le plan du mouvement est donc le plan (−−→
OM, −−−→
vM/R) = (−−−→
OM0,−→
v0)
4) Pour d´eterminer l’´energie potentielle gravitationnelle, il faut revenir au travail ´el´ementaire
fourni par la force −→
f:
δW (−→
f) = −→
fd−−→
OM =−GMT.m
r2−→
er(dr−→
er+rdθ−→
eθ) = −GMT.m
r2dr=−dEp(r)
D’o`u : Ep(r) = −GMT.m
r+Cste, soit, en prenant Ep(r→ ∞) = 0 : Ep(r) = −GMT.m
r=−K
r
5)
Em=Ek+Ep=1
2mv2−K
r=1
2m.( ˙r2+r2˙
θ2)−K
r
=1
2m. ˙r2
|{z }
Ek,radiale
+1
2m.C2
r2
|{z }
Ek,orthoradiale
−K
r
⇒Em=1
2m˙r+Ep,eff
avec : Ep,eff =1
2
mC2
r2−K
r
•lim
x→0+
Ep,eff = +∞et lim
x→+∞
Ep,eff = 0−
•Ep,eff est minimale soit : dEp,eff
dr= 0en rm=mC2
K•Ep,eff = 0 pour r=rm
2

Cor. DSno7Sa 23/02/13 ´
Electrocin´etique / M´ecanique / Solutions aqueuses |PTSI
•Plusieurs cas possibles `a condition d’avoir Em≥Ep,eff :
- cas (5),Em>0 : mvt hyperbolique (´etat de diffusion)
- cas (4),Em= 0 : mvt parabolique (´etat de diffusion)
- cas (3),Em<0 : mouvement elliptique (´etat li´e)
- cas (2),Em,min <0 : mouvement circulaire (´etat li´e)
- cas (1) : situation impossible.
6) Principe fondamental de la dynamique appliqu´e dans RGgalil´een au satellite Sen mouvement
circulaire :
m.−−−→
aM/R=−→
f⇔m¨r−r˙
θ2=−GMTm
r2⇔m−v2
r=−GMTm
r2
r¨
θ+ 2 ˙r˙
θ0dv
dt0
(−→
er,−→
eθ,−→
ez)¨z0 0 0
•D’o`u en projection selon −→
eθ:mdv
dt= 0, soit : v=Cte (le module de la vitesse est constant)
•D’o`u en projection selon −→
er:−mv2
r=−GMTm
r2, soit : v=rGMT
r
7) T=2π.r
v= 2πsr3
GMT
d’o`u la 3`eme loi de K´epler :T2
r3=4π2
GMT
8) En rempla¸cant la vitesse par son expression sur une trajectoire circulaire (cf. 6)) dans Em:
Em=1
2mv2−K
r=1
2m.GMT
r−GMT.m
r⇒Em=−1
2GMT.m
r=−Ek=Ep
2
9) Les deux satellites Set S′´etant sur la mˆeme orbite, tournent `a la mˆeme vitesse constante
(ind´ependante de leurs masses met m′!) : ils ne peuvent donc pas se heurter.
10) Le plan de la trajectoire circulaire du satellite Mdoit contenir le centre de force O(cf. 4)).
Pour qu’un satellite g´eostationnaire soit toujours au-dessus d’un mˆeme point de la surface ter-
restre, il est imp´eratif que le plan de sa trajectoire circulaire soit orthogonale `a l’axe des pˆoles.
Cl : tous les satellites g´eostationnaires sont contenus dans le plan de l’´
Equateur.
11) •Lorsque le satellite est pos´e sur la Terre en un point de latitude λ, son ´energie cin´etique
dans le r´ef´erentiel g´eocentrique est celle d’un point mat´eriel Men rotation de rayon ρ=RTcos λ
autour de l’axe des pˆoles `a la vitesse angulaire Ω = 2π
T:Ek0=1
2mv2
M/RG=1
2m(ρΩ)2, soit :
Ek0=1
2m2π
TRTcos λ2
= 0,21.109J= 0,21 GJ
•D’o`u : Em0=1
2m2π
TRTcos λ2
− GMTm
RT
Puisque le terme d’´energie potentielle est ind´ependant de la latitude (on suppose la Terre par-
faitement sph´erique), cela veut dire qu’`a l’´energie m´ecanique maximale correspond une ´energie
cin´etique maximale dans le r´ef´erentiel g´eocentrique due `a la rotation de la Terre :
Erotation
k,max =1
2m2π
TRT2
avec : vsol(λ= 0) = 2π
TRT= 0,46 km.s−1
Ce qui correspond `a λ= 0◦, soit au plan de l’´
Equateur.
Or, pour lancer le satellite, il faut lui fournir un suppl´ement d’´energie cin´etique dans le r´ef´erentiel
g´eocentrique. Ce suppl´ement sera d’autant plus faible que l’´energie cin´etique du satellite est d´ej`a
importante – ce qui est le cas lorsqu’on est proche de l’´
Equateur.
2http://atelierprepa.over-blog.com/ jpqadri@gmail.com

PTSI |´
Electrocin´etique / M´ecanique / Solutions aqueuses Sa 23/02/13 Cor. DSno7
•Mais pour b´en´eficier de cette ´energie cin´etique maximale `a l’´
Equateur dˆu `a la rotation de la
Terre, il faut bien entendu lancer le satellite dans le sens de rotation de la Terre, c’est-`a-dire
vers l’Est.
12) •Un satellite g´eostationnaire doit tourner dans le plan de l’´equateur (cf. 5) sur un cercle
de rayon rG=RT+hGavec pour p´eriode la p´eriode de rotation Tde la Terre (de mani`ere `a
ˆetre en permanence au-dessus du mˆeme point de la surface terrestre).
•Par ailleurs, la troisi`eme loi de K´epler donne :
T2
r3
G
=4π2
GMT⇒rG=T2GMT
4π21/3
= 42 170 km ⇔hG=rG−RT= 35 800 km
•La vitesse du satellite g´eostationnaire est : vG=rGΩ=(RT+hG)2π
T= 3,08 km.s−1
Rq : ces r´esultat son ind´ependant de la masse du satellite g´eostationnaire consid´er´e.
Par contre, l’´energie m´ecanique, elle, d´epend de la masse m:
EmG =1
2mv2
G
|{z }
9,5.109J
− GMTm
rG
| {z }
18,9.109J
=−9,5.109J
13) La vitesse de lib´eration correspond `a la vitesse n´ecessaire pour atteindre l’´etat de diffusion le
plus accessible (la trajectoire parabolique) au point consid´erer. Ce qui revient `a annuler l’´energie
m´ecanique `a la distance rGdu centre de force :
Em=1
2mvlib − GMTm
rG
= 0 ⇒vlib =r2GMT
rG
=√2.vG= 4,35 km.s−1
II Traitement du signal
Rq : l’A.O. est suppos´e id´eal et fonctionne en r´egime lin´eaire (r´etroaction n´egative). Donc,
puisque ǫ= 0 : VB=VE−=VE+=VM= 0
1) •Th´eor`eme de Millmann au point A:
VA=V1.Y 1+V2.Y 4+
VM.Y 2+
VB.Y 3
Y1+Y2+Y3+Y4⇒VA.(Y1+Y2+Y3+Y4) = V1.Y 1+V2.Y 4
•Th´eor`eme de Millmann au point B:
VB.(Y3+Y5) = VA.Y 3+V2.Y 5⇒VA=−Y5
Y3
.V 2
•On en d´eduit : −Y5
Y3
.(Y1+Y2+Y3+Y4).V 2=V1.Y 1+V2.Y 4
Soit : T=V2
V1
=−Y1.Y 3
Y3.Y 4+Y5.S avec S=Y1+Y2+Y3+Y4
2) Avec :
Y1=Y3=Y4=1
R,Y5=jC1ωet Y2=jC2ω
On obtient : T=−1
R2
1
R2+jC1ω. 3
R+jC2ω
Soit :
T(jω) = V2
V1
=−1
1 + j.3RC1ω+R2C1C2.(jω)2
+
_
e(t)
S
ε=0
M
R
vs
B
i-=0
i+=0
C1
R
RA
C2
jpq[email protected] http://atelierprepa.over-blog.com/ 3

Cor. DSno7Sa 23/02/13 ´
Electrocin´etique / M´ecanique / Solutions aqueuses |PTSI
3) Il s’agit d’un filtre passe-bas dont la fonction de transfert canonique est de la forme :
T(jω) = V2
V1
=A
1 + j.2m. ω
ω0
+jω
ω02avec, par identification :
ω2
ω2
0
=R2C1C2.ω2
2m. ω
ω0
= 3RC1ω
A=−1
Soit : ω0=1
R.√C1C2
;m=3
2.rC1
C2
;A=−1
4) On a :
ω0=1
R.√C1C2⇒m.ω0=3
2.s
C1
C2
.1
R.p
C1C2
=3
2RC2⇒C2=3
2Rmω0
m=3
2.rC1
C2⇒m
ω0
=3
2.rC1
C2
.R.pC1
C2=3
2.RC1⇒C1=2m
3Rω0
5) A.N. :C1= 3,8nF et C2= 16,9nF
6) T=(−j)×A
(−j)×(1−x2+j2mx)=j
2mx +j(x2−1) =Hejϕ en posant x=ω
ω0
•On en d´eduit, avec m=1
√2:
T=1
p(x2−1)2+ 4m2x2=1
√1 + x4
ϕ=π
2−arctan 1
2mx−1
x
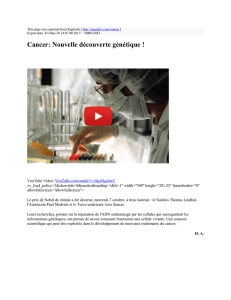
•Le gain en d´ecibels est : GdB(ω) = 20 log T=−10 log[(x2−1)2+ 4m2x2] = −10 log(1 + x4)
–80
–60
–40
–20
0
20
40
–1 –0.5 0.5 1 1.5 2
y
(a) GdB (log(x))
0
0.5
1
1.5
2
2.5
3
–2 –1 1 2
y
(b) ϕ(log(x))
•Asymptote basses fr´equences : pour ω≪ω0⇔x≪1, on a : TABF ∼ −1, soit :
GdB →GdB (ABF) = 0 dB et ϕ→ϕ(0) = π
On en d´eduit que pour x≪1, la courbe de r´eponse en gain en d´ecibels pr´esente une asymp-
tote horizontale de valeur 0 dB et que la courbe de r´eponse en phase pr´esente une asymptote
horizontale de valeur 180◦.
•Asymptote hautes fr´equences : pour ω≫ω0⇔x≫1, on a : TAHF ∼1
x2, soit :
GdB →GdB (AHF) = −40 log x dB et ϕ→ϕ(∞) = 0
On en d´eduit que pour x≫1, la courbe de r´eponse en gain en d´ecibels pr´esente une asymptote
de pente −40 dB/d´ec passant par l’origine et que la courbe de r´eponse en phase pr´esente une
asymptote horizontale de valeur 0◦.
4http://atelierprepa.over-blog.com/ jpqadri@gmail.com

PTSI |´
Electrocin´etique / M´ecanique / Solutions aqueuses Sa 23/02/13 Cor. DSno7
•Pour ω=ω0⇔x= 1, on a T=−jH0
2m=j1
√2.
D’o`u GdB (ω0) = 20 log 1
√2=−3,0dB et ϕ= 90◦.
Rq : le fait que GdB (ω0)−GdB(max) = −3,0dB indique que ω0repr´esente la pulsation de
coupure du filtre.
7) La voie Y1de l’oscilloscope sert `a visualiser V1, la voie Y2`a visualiser V2.
8) On lit T= 4 div = 50 µs
soit
f= 20 kHz et V1m= 3 V
On a donc f=f0et x= 1
soit :
T=V2m
V1m
=1
√1 + x4=1
√2
⇒V2m=V1m
√2= 2,1V
D’apr`es la r´eponse pr´ec´edente, on
sait qu’`a la fr´equence propre, V2
est en quadrature avance de phase
par rapport `a V1(ϕ=π
2).
➜D’o`u le chronogramme.
9) Connaissant la tension d’entr´ee et le filtre lin´eaire, on en d´eduit la tension de sortie :
VL=UL.cos(2π.fL.t)→V′
L=U′
L.cos(2π.fL.t +ϕL) avec fL≪f0U′
L≃UL= 10 mV
ϕL≃ −π
VB=UB.cos(2π.fB.t)→V′
B=U′
B.cos(2π.fB.t +ϕB) avec fB= 2.f0
U′
B≃UB
√17 ≃0,5mV
ϕB≃ −0,76 rad ≃43◦
Soit : V2(t) = −10.cos(2π.fL.t) + 0,5.cos(2π.fB.t + 0,76 rad) (mV )
10)
jpq[email protected] http://atelierprepa.over-blog.com/ 5
 6
7
6
7
1
/
7
100%