les hacheurs (dc/dc)

Chapitre V – Les hacheurs -
LES HACHEURS (DC/DC)
I- Introduction :
Ils peuvent être utilisés pour alimenter un récepteur sous une tension continue variable (machine à
courant continu), ou destinés à fournir une tension continue constante pour servir d’alimentation
régulée (alimentations à découpage, convertisseurs PFC – Power Factor Control).
L’étude portera sur des convertisseurs reliant directement un générateur à un récepteur (tension et
courant sont continus) :
–Les hacheurs seront donc composés exclusivement d’interrupteurs semi-conducteurs,
–Pour respecter les règles d’interconnexion entre le générateur et le récepteur, il faudra, à chaque
changement d’état d’un interrupteur, que la source de courant ne soit jamais en circuit ouvert
(sauf si i = 0 A) et que le générateur de tension ne soit jamais court-circuité.
II- Hacheur Série :
Il est appelé aussi abaisseur de tension, dévolteur, Buck converter, Step down converter. Ce hacheur
commande le débit d’un générateur de tension Ve, dans un récepteur de courant, tout deux
unidirectionnels en tension et en courant.
Source de tension.
Elle impose Ve.
Elle "subit" Ie.
Source de courant.
Elle impose IS.
Elle "subit" VS.
Figure IV. 1 : Symbole d’une source de tension et d’une source de courant, unidirectionnelles en
tension et en courant.
Configuration de base
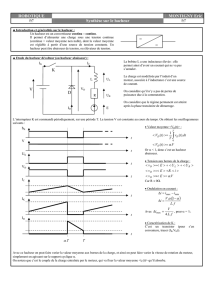
Figure IV. 2 : Schéma de principe du hacheur série et ses 3 phases de fonctionnement.
L’interrupteur "K" a une fonction de "transistor" (2 segments).
Pour cette première étude, nous considérons la source de courant parfaite, IS = constante.
1ère Phase :
Si K est "ON" alors D est polarisée en inverse, vS(t) = Ve et ie(t) = IS. La durée, tON, de cette phase est
notée T (ne pas confondre avec le du pont tout thyristor). Ici est appelé rapport cyclique.
Fait sous Linux et OpenOffice/StarOffice page 1/10

Chapitre V – Les hacheurs -
2ième Phase :
Si K est "OFF" alors D est "ON". Elle est parcourue par IS. Cette phase est appelée phase de roue
libre et a une durée de (T - T), vS(t) = 0 V et ie(t) = 0 A.
{3ième Phase : K et D "OFF", cette phase n’apparaît que si le courant s’annule}
Le rapport cyclique est compris entre 0 et 1
(en théorie).
VSmoy = Ve( IV. 0)
Iemoy = IS( IV. 0)
La tension de sortie est obligatoirement
inférieure à Ve, d’où le nom d’abaisseur. Son
réglage est réalisé par .
Figure IV. 3 : Forme d’onde dans le cas où la source de courant est parfaite.
Modélisation du récepteur
Pour ce rapprocher de cas concrets (ondulation du courant de sortie), le récepteur peut être modélisé
par une inductance en série avec un circuit RC parallèle ou une fem (charge RLE). Dans les deux
cas, l’inductance en série assure que la charge est une source de courant.
Figure IV. 4 : Sources de sortie du hacheur.
Remarque : dans la majorité des cas, un condensateur est placé à l’entrée du hacheur assurant ainsi
une tension quasi-continue. Dans la suite, nous garderons donc le même générateur que celui de la
Figure IV. 1 et en considérant qu’il fournit une tension constante.
Conduction continue : Charge RLE
Figure IV. 5 : Hacheur série charge RLE.
Hypothèse : Régime établi, semi-conducteurs parfaits.
Fait sous Linux et OpenOffice/StarOffice page 2/10
==

Chapitre V – Les hacheurs -
Calcul de valeurs moyennes :
Vmoy = Ve( IV. 0)
( IV. 0)
Figure IV. 6 : Forme d’onde du Hacheur série sur Charge RLE en mode continu.
Fonctionnement :
1ère phase : K "ON"; D "OFF";
t 0 ; T
( = tON/T)
( IV. 0)
La résolution de cette équation est obtenue à l’aide du théorème fondamental ou en appliquant :
! ! !
"
( IV. 0)
Dans le mode de conduction continue : iS(t = 0) = IInitial = ISmin (> 0 A)
En admettant que K soit toujours fermé, iS(t) atteindrait une valeur maximale définie par :
IFinal = (Ve – E)/R
( IV. 0)
Nous pouvons exprimer la valeur maximale qu’atteint le courant pour t = T :
#
( IV. 0)
2nd phase : K "OFF"; D "ON";
t T ; T
( IV. 0)
avec IInitial = ISmax et IFinal = – E/R
$
$
#
#
( IV. 0)
Nous pouvons exprimer la valeur minimale qu’atteint le courant pour t = T :
#
( IV. 0)
Nous pouvons maintenant en déduire l’ondulation de courant IS :
Fait sous Linux et OpenOffice/StarOffice page 3/10

Chapitre V – Les hacheurs -
#
( IV. 0)
Hypothèse : pour simplifier les calculs, nous pouvons approximer les morceaux d’exponentielle par
des segments de droite. Cela revient à dire que >> T. La nouvelle expression pour l’ondulation de
courant devient :
#
%
( IV. 0)
Lors du TP2, vous avez pu voir l’influence des termes de l’équation précédente sur IS.
L’ondulation est maximale pour = 0,5, elle diminue quand L ou f augmente et elle est
indépendante de R (tant que le mode de conduction est continue).
Figure IV. 7 : Ondulation du courant en supposant que >> T.
Conduction discontinue : Charge RLE
Le régime correspond à l’annulation du courant sur la période de fonctionnement. Le courant atteint
0 A lors de la phase de roue libre, il existe alors les 3 phases de fonctionnement.
Pour l’étude, nous considérons R négligeable (le courant est formé de segments de droites).
Figure IV. 8 : Forme d’onde du hacheur série sur charge RLE en mode discontinu.
Calcul de valeurs moyennes :
$
( IV. 0)
$
( IV. 0)
Fait sous Linux et OpenOffice/StarOffice page 4/10
&'

Chapitre V – Les hacheurs -
$
#
( IV. 0)
Fonctionnement :
1ère phase : K "ON"; D "OFF";
t 0 ; T
( = tON/T)
( IV. 0)
( IV. 0)
( IV. 0)
( IV. 0)
#
( IV. 0)
2nd phase : K "OFF"; D "ON";
'
t T ; T T
( IV. 0)
( IV. 0)
#
( IV. 0)
$ $
#
$
#
( IV. 0)
3ième phase : K "OFF"; D "OFF";
'
t T T ; T
( IV. 0)
( IV. 0)
Remarque : dans ce fonctionnement l’ondulation du courant est égale à Ismax.
Pour comparer le fonctionnement en mode continu et discontinu, il faut représenter la
caractéristique Vmoy, tension aux bornes de la charge RLE, en fonction du courant ISmoy, paramétrée
par . Calculons alors ISmoy :
$
#
( IV. 0)
%
( IV. 0)
Par rapport à la conduction continue (formule ( IV. 0 )), La tension de sortie ne dépend plus
directement du rapport cyclique, mais le courant moyen de sortie intervient. Le contrôle à faible
Fait sous Linux et OpenOffice/StarOffice page 5/10
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%