ROBOTIQUE MONTIGNY Eric Synthèse sur le hacheur VDK

ROBOTIQUE MONTIGNY Eric
| Synthèse sur le hacheur |
♣ Introduction et généralités sur le hacheur :
Un hacheur est un convertisseur continu – continu.
Il permet d’alimenter une charge sous une tension continue
(continue = valeur moyenne non nulle), dont la valeur moyenne
est réglable à partir d’une source de tension constante. Un
hacheur peut être abaisseur de tension, ou élévateur de tension.
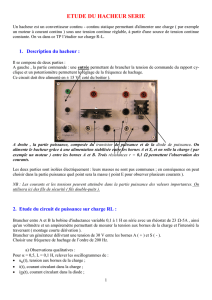
♣ Etude du hacheur dévolteur (ou hacheur abaisseur) :
La bobine L a une inductance élevée : elle
permet ainsi d’avoir un courant qui ne va pas
s’annuler.
La charge est modélisée par l’induit d’un
moteur, associée à l’inductance c’est une source
de courant.
On considère qu’il n’y a pas de pertes de
puissance due à la commutation.
On considère que le régime permanent est atteint
après la phase transitoire de démarrage.
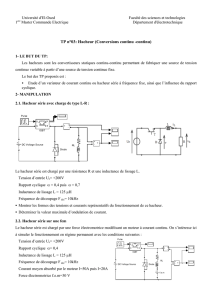
L’interrupteur K est commandé périodiquement, sur une période T. La tension V est constante au cours du temps. On obtient les oscillogrammes
suivants :
• Valeur moyenne <VD(t)> :
VtV
dttv
T
tV
D
T
DD
.)(
).(
1
)(
0
α
>=<
>=< ∫
Or α < 1, donc c’est un hacheur
abaisseur.
• Tension aux bornes de la charge :
VEv
iREv
UUEv
D
D
RLD
.
.
α
>=>≈<<
><+>>=<<
>
<
+
><+>>=<
<
Car R ≈ 0Ω.
• Ondulation en courant :
()
fL
V
i
iii
.
1..
minmax
αα
−
=∆
−=∆
Avec fL
V
i..4
max =∆ , pour α = ½.
• Caractérisation de K :
C’est un transistor (pour s’en
convaincre, tracer (IK,VK)).
Avec ce hacheur on peut faire varier la valeur moyenne aux bornes de la charge, et ainsi on peut faire varier la vitesse de rotation du moteur,
simplement en agissant sur le rapport cyclique α.
On notera que c’est le couple de la charge entraînée par le moteur, qui va fixer la valeur moyenne <iC(t)> qu’il absorbe.
b
K
V
U
K
VD
t
t
t
t
T
α
.
T
t
t
t
IC
I
K
ID
V
D
K
UL
U
R
E
VD
R
L
I
C
I
D
I
K
=
=

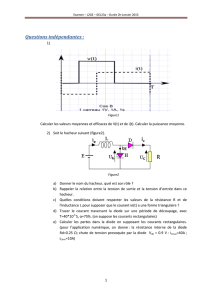
♣ Etude du hacheur survolteur (ou hacheur élévateur) :
La bobine L a une inductance élevée : elle
permet ainsi d’avoir un courant qui ne va pas
s’annuler.
La charge est modélisée par l’induit d’un
moteur.
On considère qu’il n’y a pas de pertes de
puissance due à la commutation.
On considère que le régime permanent est atteint
après la phase transitoire de démarrage.
On considère que la capacité C est suffisamment
grande, pour que l’ondulation soit nulle.
L’interrupteur K est commandé périodiquement, sur une période T. La tension V est constante au cours du temps. On obtient les oscillogrammes
suivants :
• Tension aux bornes de la charge :
()
α
−>=<
>=< ∫
1.)(
).(
1
)(
0
CK
T
DK
UtV
dttv
T
tV
α
α
−
=
−>=>=<<
>=<+>
<
1
)1.(
U
U
UUV
UVV
C
CK
LK
Or α < 1, donc c’est un hacheur
élévateur.
• Ondulation en courant :
()
fL
U
i
iii
C
.
1..
minmax
αα
−
=∆
−=∆
Avec fL
V
i..4
max =∆ , pour α = ½.
La valeur moyenne de la tension de sortie est supérieure à la valeur moyenne de la tension d’entrée, ce qui justifie la dénomination de hacheur
élévateur de tension.
On notera que le raisonnement à suivre pour étudier un hacheur élévateur ou un hacheur abaisseur est le même, et les résultats sont identiques,
seules les structures changent.
On remarque que UC est constante, car on a considéré que la capacité C était très élevée. Cette approximation peut être discutable, mais elle
permet de simplifier grandement les expressions, et de faciliter le tracé des signaux.
b
K
V
U
K
U
C
t
t
t
t
T
α
.
T
t
t
t
I
C
I
K
ID
V
U
L
U
R
E
R
U
K
U
C
U
D
I I
D
I
K
1
/
2
100%