Partie C : Etude du comportement mécanique des modèles

163
ANNEXE A3 – Définition du problème mécanique et résolution par un
code de calcul numérique utilisant la méthode NSCD
A Généralités – Lois de la mécanique et démarche numérique pour
l'utilisation de LMGC [Cambou et coll. 2001, Jean 1999]
I Les conditions d'unilatéralité de Signorini
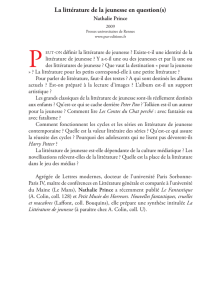
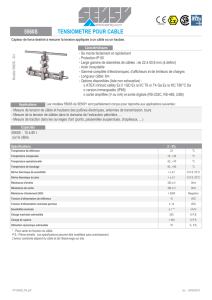
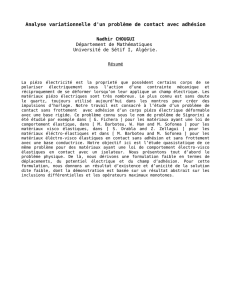
Considérons deux corps O et O' comme schématisés ci-dessous dans un repère local :
O
P
N
T
P ’
O ’
Figure A3-1 : Repère local à partir duquel est définie la notion de contact
On appelle candidat au contact (ou tout simplement contact) le couple unique composé d'un
objet candidat O portant un contacteur candidat PO et d'un objet antagoniste O' portant un
contacteur antagoniste P'O'. Le vecteur P'P définit alors un vecteur normal unitaire N, dirigé
par convention depuis l'objet antagoniste vers l'objet candidat et auquel on associe deux autre
vecteurs unitaires formant une base orthonormée locale dont le vecteur tangentiel T, comme
décrit sur la figure ci-dessus. On note, dans le but de décrire une loi de contact, les composantes

164
de la vitesse relative de P par rapport a O' : U=(U, U) ; les composantes de la force de réaction
exercée par O' sur l'objet O : R=(R, R) ; l'interstice :
PPg '
.
D'une manière générale, les relations décrivant le contact unilatéral s'écrivent comme
suit :
impénétrabilité : g 0,
aucune attraction n'est exercée entre les objets : R 0,
la force de réaction s'annule lorsque les objets ne sont plus en contact : g > 0 R= 0.
Les trois relations ci-dessus peuvent être résumées dans une unique relation complémentaire
appelée condition de Signorini :
g 0 R 0 gR = 0 (A3-1)
Il est aisé de montrer qu’il est possible d’écrire la condition de Signorini en vitesse [Cambou et
coll. 2001, Jean 1999] :
pour un temps initial t0, g(t0) 0;
t I, intervalle de temps où est définie la fonction t U(t), si g(t) 0 alors (A3-2)
U(t) 0 R(t) 0 U(t)R(t) = 0.
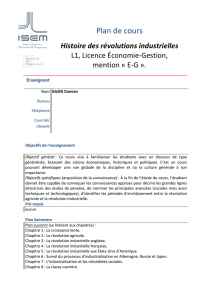
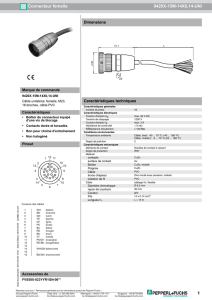
Les conditions (1) et (2) peuvent être représentées dans le graphique de Signorini suivant :

165
Figure A3-2 : Représentation graphique de la condition de Signorini
Remarque : le graphique ci-dessus n'est pas la représentation graphique d'une fonction, dans la
mesure ou R et g (respectivement U) sont indépendants, c'est à dire R R(g) et g g(R)
(respectivement R R(U) et U U(R)).
II Les lois de Coulomb
Le frottement sec est décrit de la manière suivante : la réaction tangentielle R représente
la force de frottement et appartient au cône de Coulomb :
NNTNT R;RRouRR
(A3-3)
où est un coefficient de frottement.
De plus, on conviendra que si la vitesse de glissement (c'est à dire la vitesse tangentielle U) est
strictement positive alors la réaction tangentielle est de signe opposé à la réaction normale
(RR) tandis que si la vitesse de glissement est strictement négative alors RR. Ces
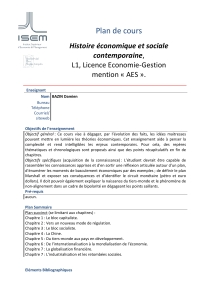
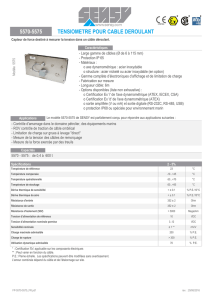
relations peuvent être représentées par le graphique de Coulomb suivant :
RN
UN
g

166
RT
-RN
RN
UT
Figure A3 – 3 : Représentation graphique de la loi de Coulomb
Remarque : toutes les représentations graphiques montrées ci-dessus sont monotones et si l'on
superpose à ces graphiques une droite de pente positive alors il existe un seul et unique point
d'intersection avec le graphique considéré ; autrement dit, la solution d'un problème de contact
considéré à partir des lois de Sinorini-Coulomb existe et est unique.
III Relations cinématiques
La configuration d'un point matériel est donnée par la variable de Lagrange q,
q
étant sa
vitesse à laquelle on peut associer la réaction r. L'analyse cinématique classique peut être
représentée schématiquement comme suit :

167
Equation de la dynamique
Relation de contact frottant
q
r
R
U
Equation de la dynamique
Relation de contact frottant
HH
Equation de la dynamique
Relation de contact frottant
q
q
r
r
R
R
U
U
Equation de la dynamique
Relation de contact frottant
HH
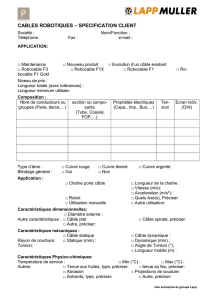
Figure A3-4 : Schéma de dualité ou analyse cinématique
où le lien entre {
q
} et {r} est l’équation de la dynamique, le lien entre {U} et {R} est la « loi de
Singnorini-Coulomb » (fonction réversible) et avec les relations non réversibles H et H qui sont
définies comme suit [Cambou et coll. 2001, Jean 1999] :
q)q(HUetR)q(Hr *
(A3-4)
H(q) et H(q) sont des applications linéaires prenant en compte les paires de contacteurs
entre candidat et antagoniste, et H(q) est la transposée de H(q). De plus, il apparaît que le
schéma ci-dessus ne peut se construire que dans un sens unique, imposant un sens à la démarche
de résolution numérique. Enfin, on notera pour la suite que la composante normale de la vitesse
relative U est égale à la dérivée par rapport au temps de l'interstice g :
N
Ug
(A3-5)
 6
7
8
9
10
6
7
8
9
10
1
/
10
100%