Exercices choisis d`algèbre linéaire et de géométrie vectorielle

Exercices choisis d’algèbre linéaire et de géométrie
vectorielle
Exercice 1
On considère l’espace vectoriel R2
(a) Montrer que toute famille de quatre vecteurs dans R2est liée.
(b) Est-ce vrai aussi de toute famille de trois vecteurs?
(c) Quel est le nombre maximal de vecteurs d’une famille libre dans R2?
Exercice 2
Montrer dans R3que deux vecteurs orthogonaux sont linéairement indépendants.
Exercice 3
On considère le sous-ensemble V= { a c
0b!
a−2b=0,c∈R}de M2×2(matrices 2 sur 2).
(1) Prouver que c’est un sous-espace vectoriel de M2×2.
(2) Donner sa dimension.
(3) Présenter une base de ce sous-espace.
Exercice 4
Trouver l’intersection des 3 plans d’équations respectives
Π1: 3y+2z+1=0Π2: 3x+z−2=0Π3:x+y+z=2
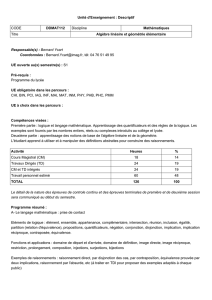
En fonction du résultat obtenu, décider dans quel cas de figure (cf. ci-dessous les 5 possibilités) on se trouve. Plus précisément
1. Donner un argument court pour éliminer certains cas.
2. Trouver le cas approprié après calcul de l’intersection.
3. Si on se trouve dans un cas différent de la figure 1 ou 5, donner la direction des droites di.
4. Quelle valeur donnée à la constante du plan Π1pour changer de cas de figure?
Le seul changement de cas de figure envisageable en modifiant la constante (on obtient un plan parallèle à Π1) est le
passage au cas de figure 3.
5. Est-il possible de trouver pour cette constante une valeur de telle sorte que l’on se retrouve dans le cas de figure 3 ?
(une réponse obtenue par tâtonnement n’est pas une réponse suffisante, remplacer peut-être dans l’équation de Π1la
constante par une variable m...)
Π1
Π2
Π3
Π2
Π3
Π1
d1
d3
d1=d2=d3=d
Π1
Π2
Π3
Figure 1 Figure 2 Figure 3
1

Π1
Π2
Π3d1
d2
d3
d1
d2
d3
II
Π1
Π2
Π3
Figure 4 Figure 5
Exercice 5
Soit une pyramide dont la base est un parallélogramme ABCD et qui a pour sommet S. Les coordonnées des points connus
sont A(−3 ; −3 ; 3), B(2 ; −4 ; 2), C(1 ; 2 ; 0)
Le point S, lui, appartient à la droite Dd’équation
x= −1−t
y= −2+4t
z=5+t
On sait encore que le tétraèdre ABCS a pour volume 30.
1. Trouver les coordonnées du point D.
2. Donner les équations cartésienne et vectorielle du plan
contenant le parallélogramme ABCD.
3. Déterminer la distance de ce plan à l’origine.
4. Calculer l’angle aigu de ce plan avec le plan (Oxy).
5. Déterminer les coordonnées du point S.
6. Déterminer les coordonnées du point S′symétrique
de Spar rapport au plan ABCD (si vous n’avez pas
trouvé les coordonnées de Sau point précédent, utili-
sez S(−2 ; 2 ; 6) ).
A
B
C
D
S
(croquis)
Exercice 6
Est-ce que les vecteurs
1
0
1
,
−1
2
0
et
1
6
4
de R3engendrent le même sous-espace que les vecteurs
0
2
1
et
4
6
7
?
Exercice 7
Soit P3= {a0+a1x+a2x2+a3x3
a0,...,a3∈R}, l’espace vectoriel des polynômes de degré 3 ou moins.
(1) Montrer que E= { f∈ P3}
x·f′′(x)−f′(x)=0 est un sous-espace vectoriel de P3.
(2) Trouver une base à ce sous-espace.
2

(3) Vérifier que les éléments de la base sont linéairement indépendants.
Exercice 8 1. Soient la famille de vecteurs
{
1
1
−1
,
0
3
3
,
2
3
−1
,
7
6
−8
}
qui engendrent un espace vectoriel V.
(a) Déterminer la dimension de Vet proposer une base de V.
(b) Déterminer les coordonnées du vecteur ~v=
1
−3
−5
dans cette base.
(c) Trouver une équation cartésienne caractérisant V.
2. Soit la famille de vecteurs
{
−1
s
1
,
1
s
−1
,
s
1
2
}
(a) Déterminer r∈Rtelle que cette famille forme une base de R3.
(b) Quelle est la (ou les) valeur(s) à chosir pour rpour que cette famille ne soit pas une base de R3(sans la Ti-89).
Exercice 9
Déterminer (sous forme matricielle) la transformation linéaire de R2dans R2correspondant à une rotation de centre Oet
d’angle π/3. Pour ce faire, chercher les images des vecteurs de la base standard de R2.
1. Trouver l’image du vecteur 1
4!.
2. Trouver l’image de la droite dpassant par le point (1 ; 4) et de vecteur directeur ~
d= 1
1!
3. Est-ce qu’une translation dans le plan t: x
y!7→ x+a
y+b!est une application linéaire? Justifier votre réponse.
Exercice 10
On considère le sous-ensemble {
x
y
z
w
x+2y=0 et w= −2x+3y}de R4.
(1) Prouver que c’est un sous-espace vectoriel de R4.
(2) Donner sa dimension.
(3) Présenter une base de ce sous-espace.
Réponses
Exercice 1
1. Pour quatre vecteurs données, on regarde si la combinaison linéaire égale à ~
0 peut s’obtenir avec des coefficients différents
de 0.
α x1
y1!+β x2
y2!+γ x3
y3!+δ x4
y4!= 0
0!
C’est un système de 2 équations avec 4 variables, il y a donc au moins 2 variables libres pour lesquelles il est possible de
choisir des valeurs différentes de 0. La famille est donc liée.
2. De manière semblable, on a 2 équations et 3 variables, ce qui fait une variable libre pour laquelle il est possible de choisir
une valeur différente de 0. La famille est donc liée.
3

3. On prenant deux vecteurs bien choisis (non colinéaires), on peut écrire un système homogène de 2 équations avec 2
variables qui une fois échelonné a la forme
α x1
y1!+β x2
y2!= 0
0!⇔ x1x20
y1y20!⇔ x1x20
0y′
20!
D’où on tire que le coefficient β=0, puis par substitution α=0.
Exercice 2 On sait que deux vecteurs sont orthogonaux dans R3seulement si leur produit scalaire est nul.
Soit deux vecteurs (non nuls) perpendiculaires ~vet ~w. En partant de la relation linéaire c~v+d~w=~
0 et en multipliant
chaque membre par ~v, on peut conclure c· k~vk2+d~v·~w=~
0, c’est-à-dire c· k~vk2+d·0=0. Comme ~v≠0, on a c=0.
De manière semblable, on montre que d=0.
Exercice 3 (1) C’est un sous-espace vectoriel
– Il n’est pas vide, car il contient l’élément nul.
– clôture pour l’addition : soit a c
0b!, a′c′
0b′!∈V, montrons que la somme a+a′c+c′
0b+b′!est dans V.
(a+a′)−2(b+b′)=a−2b
| {z }
0+a′−2b′
| {z }
0=0
c+c′∈R
– clôture pour la multiplication : montrons que le multiple d’un vecteur de Vest dans V: soit α a c
0b!
(αa)−2(αb)=α(a2b
|{z}
0
)=0 et αc∈R
(2) le système d’équations se réduit à une équation a−2b=0 et 3 inconnues : il y a donc 2 variables libres, bet c. Ainsi
a=2bet avec les deux paramètres libres, la dimension est 2.
(3) on a V= { a c
0b!= 2 0
0 1!b+ 0 1
0 0!c
b,c∈R}. Une base de Vest ainsi B= h 2 0
0 1!, 0 1
0 0!i
Exercice 4 1. Les vecteurs normaux aux trois plans sont respectivement
~n1=
0
3
2
,~n2=
3
0
1
et ~n3=
1
1
1
: il n’y a donc pas de plans parallèles, ce qui exclut les figures 1 et 2.
2.
3y+2z= −1
3x+z=2
x+y+z=2⇒
0 3 2 −1
3 0 1 2
1 1 1 2
⇒
1 1 1 2
3 0 1 2
0 3 2 −1
à la main
7−→
1 1 1 2
0 3 2 4
0 0 0 −5
Pas d’intersection. Ceci correspond à la figure 4.
3. ~
di=~n1×~n2=
~
i0 3
~
j3 0
~
k2 1
=
3−0
−(0 −6)
0−9
=
3
6
−9
ou ~
di=
1
2
−3
4.
3y+2z=m
3x+z=2
x+y+z=2⇒
0 3 2 m
3 0 1 2
1 1 1 2
⇒
1 1 1 2
3 0 1 2
0 3 2 m
à la main
7−→
1 1 1 2
0 3 2 4
0 0 0 m−4
⇒m=4
Exercice 5 1. Trouver les coordonnées du point D.
−→
AB =−−→
DC ⇔
2−(−3)
−4−(−3)
2−3
=
1−x
2−y
0−z
⇔
5
−1)
−1
=
1−x
2−y
0−z
⇔
x= −4
y=3
z=1
2. Donner les équations cartésienne et vectorielle du plan contenant le parallélogramme ABCD.
Pour l’équation vectorielle, on a besoin de deux vecteurs directeurs −→
AB et −→
AC =
4
5
−3
.
4

ΠABC :
x
y
z
=
−3
−3
3
+α
5
−1
−1
+β
4
5
−3
L’équation cartésienne peut se trouver de deux manière différente :
1o
x−(−3) 5 4
y−(−3) −1 5
z−3−1−3
=0⇔(x+3)(3 −(−5)) −(y+3)(−15 −(−4)) +(z−3)(25 −(−4)) =0
On en tire : 8x+11y+29z=30
2oOn cherche le vecteur normal ~n=−→
AB ×−→
AC =
5
−1
−1
×
4
5
−3
=
8
11
29
Puis on utilise le point A: 8x+11y+29z=d⇒8·(−3) +11 ·(−3) +29 ·3=30
3. Déterminer la distance de ce plan à l’origine.
∆(Π,O)=|8·0+11 ·0+29 ·0−30|
p82+112+292=30
3√114 =10
√114 =5
57p114
4. Calculer l’angle aigu de ce plan avec le plan (Oxy).
On cherche l’angle entre ~net
0
0
1
) : cos(α)=8·0+11 ·0+29 ·1
3√114 ·1
D’où α=arccos( 29
3√114 )≈25o
5. Déterminer les coordonnées du point S.
VolABC S =1
6|[−→
BA,−→
BC,−→
BS]| = 1
6|
−5−1−1−t−2
1 6 −2+4t−(−4)
1−2 5 +t−2
| = 1
6| − 85 −65t| = 30
C’est-à-dire 85 +65t=180 ou −85 −65t=180, d’où t=19/13 ou −53/13.
Ainsi S=(−1+53/13 ; −2−212/13 ; 5 −53/13) =(40/13 ; −238/13 ; 12/13)
ou S=(−1−19/13 ; −2+76/13 ; 5 +19/13) =(−32/13 ; 50/13 ;84/13)
6. Déterminer les coordonnées du point S′symétrique de Spar rapport au plan ABCD (si vous n’avez pas trouvé les
coordonnées de Sau point précédent, utilisez S(−2 ; 2 ; 6) ).
On prendra S(−2 ; 2 ; 6) : on cherche l’intersection de DSS′:
x
y
z
=
−2
2
6
+α
8
11
29
avec Π: 8x+11y+29z=30.
8(−2+8α)+11(2 +11α)+29(6 +29α)=30 ⇔α= −25/171
Dans l’équation de la droite DSS′,
– si α=0, on a le point S,
– si α= −25/171, on a le point I= DSS′∩Π,
– si α= −50/171, on a le point S′=(−2−50·8
171 ; 2 −50·11
171 ; 6 −50·29
171 )
Exercice 6 On peut chercher à savoir si les 2 familles de vecteurs engendrent le même espace :
α
1
0
1
+β
−1
2
0
+γ
1
6
4
=δ
0
2
1
+λ
4
6
7
⇔α
1
0
1
+β
−1
2
0
+γ
1
6
4
−δ
0
2
1
−λ
4
6
7
=0
1−1 1 0 −4 0
026−2−6 0
104−1−7 0
à la main
7−→
1−1 1 0 −4 0
0 2 6 −2−6 0
0 0 0 0 0 0
On a 2 équations et 5 variables, donc 3 variables libres. Ce qui signifie que pour toute valeur de δet γ(3 variables libres),
il est possible de trouver les valeurs correspondantes pour α,βet γ, et, inversement, pour toute valeur de α,βet γ(3 variables
libres), il est possible de trouver les valeurs correspondantes pour δet γ.
Exercice 7 (1) C’est un sous-espace, car
–En’est pas vide. Par exemple f(x)=3xen fait partie.
– clôture par combinaison linéaire, soit f1,f2∈Eet a,b∈R
x·(a f1+b f2)′′ −(a f1+b f2)′=x·(a f ′′
1+b f ′′
2)−(a f ′
1+b f ′
2)=a(x f ′′
1−f′
1)
| {z }
0
+b(x f ′′
2−f′
2)
| {z }
0
=0
5
 6
7
6
7
1
/
7
100%