Présentation du travail

1
Naudot guillaume Lycée Pierre-Emile-Martin
TEL2 Académie Orléans-Tours

2
PRESENTATION DU TRAVAIL 3
I) ANALYSE FONCTIONNEL 4
I-1) Schéma fonctionnel de niveau 1 : 4
I-2) Schéma fonctionnel de 1er degrés : 4
I-3) Schéma fonctionnel de degrés 2 : 5
I-4) Description des fonctions secondaires : 7
II) ANALYSE STRUCTURELLE : 8
II-1) Calcul de RA1 : 8
II-2) Etude de la chaîne d’acquisition (théorique) : 8
III) ANALYSE DU LOGICIEL : 11
III-1) Description du programme : 11
III-2) Fonctionnement du programme : 11
III-3) Algorithme du programme : 12
IV) MISE EN ŒUVRE, TESTS ET REGLAGES 13
ANNEX : listing commenté du programme : 16

3
PRESENTATION DU TRAVAIL
Le thème de cette année est une attelle de rééducation de la
hanche. Utilisée en médecine, elle permet d’aider à la reconsolidation
des muscles par un système de flexion et d’extension programmable.
Notre carte à pour but de mesurer et limiter le courant moteur :
en cas de contrainte sur l’attelle, pour la sécurité du patient comme
celle de l’appareil, il faut arrêter le système et prévenir de la
défaillance en cas de surintensité.
Le cœur de la carte est un microcontrôleur ATMEL 90s8535 qui
permet de paramétrer la valeur du seuil ainsi que l’affichage de
l’intensité en temps réel.
Le capteur utilisé est un CSLACD qui permet de convertir en
tension des courants pouvant aller de -36A à +36A (dans notre cas
nous utiliserons un plage d’environ [0 ;5A]). Nous pourrons ainsi
convertir le courant moteur en une tension exploitable par le
microcontrôleur et donc afficher la valeur de l’intensité.
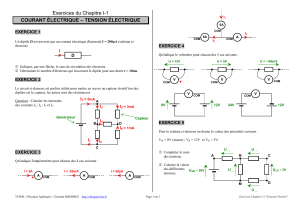
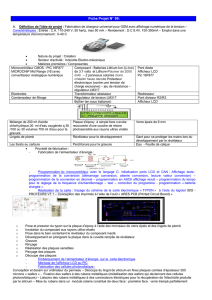
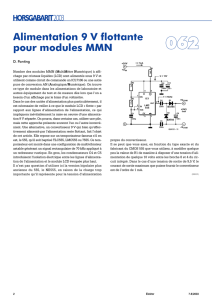
La sensibilité du capteur fourni pas le constructeur est de
32.7mVxN pour 8Vcc. Nous utilisons un capteur munit de 10 Spires
et d’un Vcc de 12V. La sensibilitée devrai être de 490mV/A. dans le
dossier technique de l’attelle, il nous est donné une sensibilité de
0.552V/A avec un décalage de +6V. Nos calculs seront donc effectué
grâce à cette dernière valeur. La fonction désirée étant de 1V/A, nous
allons utiliser un réseau d’ADI afin de supprimer le décalage puis
d’amplifier pour obtenir la bonne sensibilité de 1V/A.
Courbe réelle.
Courbe souhaité.
+6V
+12V
+2,5A
5A
0
VCAPT
IMOT
+2,5V
+5V
+2,5A
5A
0
IMOT
VCOUR-ANA

4
I) ANALYSE FONCTIONELLE.
I.1) Schéma fonctionnel de niveau 1
Affichage du
courant moteur
Mesure et affichage du
Courant moteur
I-mot
courant moteur
Alarme de
surintensité
Schéma fonctionnel présentent ensemble de la maquette.
I.2) Schéma fonctionnel de 1er degré
Schéma fonctionnel de degrés 1, présentent les fonctions principales
de notre carte, ainsi que les différents signaux d’entrées et de sortie.
LCD
Alarme de
surintensité
Affichage
LCD
Captage et
mise en forme
du courant
moteur
FP5
Traitement et
memorosation
FP1
I-mot
Cour-ana
BUZ
Acquisition des
consignes
Informations visuelles
et sonores
FP2
S2

5
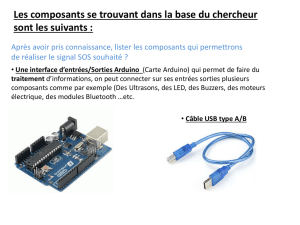
I.3) Schéma fonctionnel de degrés 2.
Ce schéma de degrés 2 représente l’ensemble des fonctions
secondaires de la fonction principal. Cette fonction étant la plus
importante : le reste se déroulant dans le CAN sous la forme d’un
programme
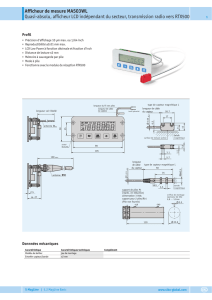
Cette photo montre la carte
que nous avons fabriqué,
avec les différents
composant qui la consiste.
Sur la page suivante, un schéma montrant les fonctions secondaires de
la carte et les composants utilisés.
Conversion
courant
tension
FS 51
Décalage
FS 52
Filtrage et
amplification
FS 53
I-mot
Vcapt
Vimg-cour
Création d’une
tension
continue : 6V
Vimg-cour-amp
Vdecal
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%