Correction exo robot mobile

Conception robotique CORRECTION
Lycée Louis Payen
1
CORRECTION ETUDE D’UN ROBOT MOBILE
I- Mise en situation
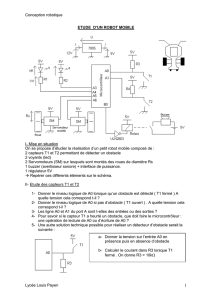
On se propose d’étudier la réalisation d’un petit robot mobile composé de :
2 capteurs T1 et T2 permettant de détecter un obstacle
2 voyants (led)
2 Servomoteurs (SM) sur lesquels sont montés des roues de diamètre Rs
1 buzzer (avertisseur sonore) + interface de puissance.
1 régulateur 5V
Repérer ces différents éléments sur le schéma.
II- Etude des capteurs T1 et T2
1- Donner le niveau logique de A0 lorsque qu’un obstacle est détecté ( T1 fermé ) A
quelle tension cela correspond t-il ? A0=0 (0V)
2- Donner le niveau logique de A0 si pas d’obstacle ( T1 ouvert ) . A quelle tension cela
correspond t-il ? A0=1 (5V)
3- Les ligne A0 et A1 du port A sont des entrées
4- Pour savoir si le capteur T1 a heurté le microcontrôleur fait une opération de lecture
de A0
5- Une autre solution technique possible pour réaliser un détecteur d’obstacle serait la
suivante :
a- A0=5V si obstacle .
A0=0V si pas d’obstacle
b- U=RI -> I=U/R = 5/10000 = 0,5mA
VOYANTS
CAPTEURS
Interface de puissance
Régulateur 5V

Conception robotique CORRECTION
Lycée Louis Payen
2
III- Etude des voyants
Les deux leds sont pilotées par le microcontrôleur pour signaler une rotation à gauche ou à
droite du robot
1- compléter le tableau de fonctionnement ci-dessous :
A4
LED (allumée ou éteinte)
0
Allumée
1
Eteinte
Note : le niveau logique 1 correspond à 5V
2- la ligne A4 du port A doit être configurée en sortie
3- Pour allumer la led, le microcontrôleur doit réaliser une opération d’écriture de A4
4- R1 = ( Vcc – Vled )/ I = (5 – 2)/0,02 = 150
5- D’après la documentation constructeur du microcontrôleur, indiquer si A4 peut
commuter 20mA. : Oui car le courant max Id est de 25mA > 20mA
6- En Qbasic, pour mettre A4 à 1 on peut écrire PORTA.4 = 1 . On peut aussi réaliser
l’opération suivante :
PORTA = PORTA OR %00010000. (le sigle % signifie mot en binaire)
Compléter la dernière ligne du tableau ci-dessous :
A7
A6
A5
A4
A3
A2
A1
A0
PORT A
X
X
X
X
X
X
X
X
VALEUR
OR
Ou
Logique
0
0
0
1
0
0
0
0
MASQUE
X
X
X
1
X
X
X
X
Résultat
Note : X = 0 ou 1 . on ne connaît pas à priori le contenu du port A. Les bits A0 à A3 et A5 à
A7 ne doivent pas être modifiés, seul A4 doit être mis à 1.
7- En Qbasic, pour mettre A4 à 0 , on peut écrire PORTA.4 = 0. On peut aussi réaliser
une opération logique avec un masque (compléter le tableau ci-dessous, trouver
l’opération logique et la valeur du masque !)

Conception robotique CORRECTION
Lycée Louis Payen
3
A7
A6
A5
A4
A3
A2
A1
A0
PORT A
X
X
X
X
X
X
X
X
VALEUR
AND
ET
Logique
1
1
1
0
1
1
1
1
MASQUE
X
X
X
0
X
X
X
X
Résultat
Compléter : PORTA = PORTA AND 11101111
IV- Etude de l’interface de puissance du Buzzer
1- Quel niveau logique doit-on avoir en sortie B0 pour commuter le relais (et activer le
buzzer) ? : Niveau logique 1
2- Calculer le courant dans le relais sachant que la résistance interne du relais est de
110 : I = Vcc/R = 5/110 = 45mA
3- Oui, l’uln2803 peut commuter jusqu’à 500mA , donc pas problème pour 45mA !
4- L’utilisation d’un relais pour commuter la puissance au buzzer est-il réellement justifié
ici, sachant que le buzzer consomme 75mA ? (rep : NON) Proposer un schéma sans
le relais (compléter ci-dessous) :
ULN2803

Conception robotique CORRECTION
Lycée Louis Payen
4
V- Etude des servomoteurs
Un servomoteur est composé d’un moteur à courant continu, d’un réducteur (engrenages) et d’une électronique de
commande avec un potentiomètre qui permet d’asservir la position de l’arbre en sortie à un angle déterminé (entre 0 et
180° environ).
Pour utiliser le servomoteur comme un moteur de propulsion (pouvant tourner normalement ) , il est nécessaire d’effectuer
une modification mécanique (du type réalisé en miniprojet)
1- La mesure de la vitesse de la roue avec un tachymètre donne N= 120tr/min
Calculer la vitesse de rotation du moteur (en tr/min) sachant que le rapport de réduction
est de 1/20 Rep : Nmoteur = 120*20 = 2400tr/min
2- On donne V= R , avec :
:vitesse angulaire en radian/s
R rayon de la roue en mètre ( R= 2cm à convertir en mètre )
V : Vitesse linéaire du véhicule en m/s
De plus on donne = 2N avec N : vitesse de rotation en tour/minute (Tr/min)
60
Calculer la vitesse V du véhicule en m/s . En déduire la vitesse V en km/h
Rep : = 2**120/60 = 12,5 rd/s et V=*R = 12,5*0.02 = 0,25m/s
En km/h : V= 0,25*3600/1000 = 0,9km/h
3- Le servomoteur consomme 250mA sous 5V .
Calculer la puissance absorbée Pabs (On donne Pabs = U * I , avec U en volt, I en
ampère, Pabs en Watt) Rep : Pabs = 5*0,250 = 1,25W
Calculer la puissance mécanique (en watt) disponible en sortie sachant que cette puissance
est le produit du couple en sortie par la vitesse de rotation.
Ps = Cs*s . on donne Cs=0,08Nm et s=12,5rd/s Ps en Watt
Rep : Ps = 0,08*12,5 = 1W
En déduire le rendement = _ Ps__ = 1/1,25 = 0,8 soit 80%
Pabs
VI – Etude du régulateur 7805
Le régulateur 7805 permet d’obtenir une tension d’alimentation 5V à partir de la source 12V
(venant d’une batterie ou accumulateurs)
Calculer la puissance dissipée par ce régulateur sachant que le courant fourni est de 700mA.
(Rappel : P = U*I , U tension aux bornes du régulateur et I courant le traversant)
Rep : P = (12 – 5) * 0.7 = 4,9W
Cette puissance dissipée dans le régulateur est de l’énergie perdue par effet joules (chaleur) !
Quelle est la puissance absorbée par le régulateur ? (Pabs = tension d’entrée * courant)
Rep : Pabs = 12*0,7 = 8,4W
Quelle est la puissance fournie par le régulateur ? (Pfournie = tension sortie * courant )
Rep : Pfournie = 5*0,7 = 3,5W
Quel est le rendement du régulateur ? ( =Pfournie/Pabs)
=Pfournie/Pabs = 3,5/8,4 = 0,41 = 41%
Conclusion : Que faudrait-il faire pour améliorer le rendement ? (et donc limiter la puissance
perdue par effet joules dans le régulateur).
Rep : Il faudrait diminuer le différentiel entre la tension d’entrée et la tension de sortie, par
exemple avoir une batterie de 8V au lieu de 12V. Attention, il ne faut pas descendre en
dessous de 7V pour la tension d’entrée sinon la régulation 5V n’est plus assurée par le 7805
Note : Meilleur sera le rendement, meilleur sera l’autonomie de votre robot. En pratique, on utilise le régulateur que pour
alimenter la carte microcontrôleur 68HC11 qui nécessite du 5V stabilisé. On alimente les servomoteurs avec 4 batteries de 1,2V
(1,4V chargées) soit 5,6V ce qui évite de perdre de la puissance dans le régulateur par effet joules !
1
/
4
100%