Devoir surveillé n° 7 - Sciences physiques TSI-1 Pierre

TSI 1 2009-2010
Lycée Pierre-Paul Riquet
1
Devoir surveillé n° 7
Durée : 4h
Chimie : Dosage d’une solution aqueuse d’ammoniac par de l’acide chlorhydrique (CCP TSI 2004)
Une solution aqueuse S1 d'ammoniac NH3 de volume V1 = 20 mL et de concentration C1 = 0,01 mol.L–1 est dosée
par une solution S2 d'acide chlorhydrique de concentration C2 = 0,02 mol.L–1.
L’acide chlorhydrique est un acide fort (H3O+ + Cl–). pKa(NH4+/NH3) = 9,2.
1) Déterminer le pH de la solution S1.
2) Ecrire l’équation bilan de la réaction de dosage et calculer sa constante d’équilibre. La réaction est-elle totale ?
Justifier votre réponse.
3) Calculer le volume V2E de la solution d'acide chlorhydrique versé à l'équivalence.
4) Déterminer le pH du mélange à l'équivalence.
5) On veut exprimer le pH du mélange au cours du dosage en fonction du volume V2 d'acide versé et du pKa
du couple NH4+/NH3 pour V2 inférieur à V2E. On posera V2 = x.V2E avec 0 < x < 1.
a) Donner l’expression littérale des concentrations des espèces NH3 et NH4+ en fonction de C2, V2E, x et V1.
b) Exprimer le pH du mélange en fonction du pKa du couple NH4+/NH3 et de x.
c) Calculer le pH du mélange pour x = 0,5 puis pour x = 0,48 et x = 0,52. Conclure.
d) Donner l’allure de la courbe pH(V2).
Mécanique :
Exercice n° 1 : (CCP TSI 2007)
Au cours de ce problème, nous envisagerons deux situations différentes d’un petit anneau M de masse m,
considéré comme ponctuel, soumis à la pesanteur et susceptible de se déplacer sans frottements le long d’une
tige OA, de longueur l, effectuant des mouvements de rotation caractérisés par une vitesse angulaire ω constante
autour d’un axe fixe vertical (Δ) passant par son extrémité O.
Le référentiel lié au laboratoire sera considéré comme galiléen.
L’espace est rapporté au repère cartésien R (O,
zyx eee ,,
) lié au laboratoire et tel que :
x
e
: vecteur unitaire de l’axe horizontal Ox.
y
e
: vecteur unitaire de l’axe horizontal Oy.
z
e
: vecteur unitaire de l’axe vertical Oz.
On pourra lors des calculs vectoriels utiliser les vecteurs unitaires
Tr eee ,,
définis de la manière suivante :
r
e
: vecteur unitaire du plan (Oxy) dirigé suivant la projection de la tige dans le plan (Oxy) et
orienté dans le sens OA de la tige.
e
: vecteur unitaire du plan (Oxy), perpendiculaire au vecteur
r
e
et tel que le repère Rc (
zr eee ,,
) soit un
repère direct.
T
e
: vecteur unitaire de la tige et orienté de O vers A.
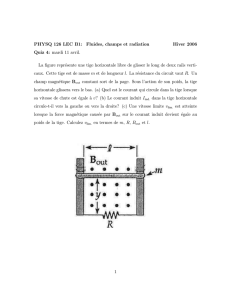
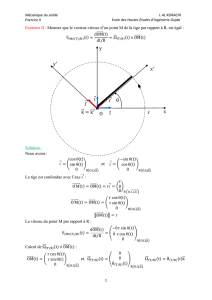
Première partie : la tige OA est dans le plan horizontal
La tige OA se trouve dans le plan horizontal (xOy) et
tourne autour de l’axe vertical (Δ) à la vitesse angulaire
constante ω. L’axe (Δ) est ainsi confondu avec l’axe Oz.
Dans ce cas on a donc :
r
e
=
T
e
. L’anneau est libéré
sans vitesse initiale par rapport à la tige à une distance r0
du point O (r0 < l).
On repère la position de l’anneau sur la tige par la
distance r entre le point O et l’anneau M (r = OM).
L’étude est menée dans le référentiel lié à la tige.

TSI 1 2009-2010
Lycée Pierre-Paul Riquet
2
1) L’anneau est soumis à son poids, aux forces d’inertie et à la réaction de la tige. Faire un schéma sur lequel
apparaissent ces forces. Ecrire l’expression vectorielle du poids et des forces d’inertie en fonction de m, g, ω, r
et des vecteurs unitaires définis précédemment. Quels sont les vecteurs unitaires qui portent les composantes
de la réaction de la tige ?
2) En appliquant le principe fondamental de la dynamique, établir l’équation différentielle vérifiée par r(t).
3) Intégrer cette équation différentielle en prenant en compte les conditions initiales définies précédemment et
déterminer la solution r(t) en fonction de r0, ω et t.
4) En déduire l’expression du temps que va mettre l’anneau pour quitter la tige. On exprimera en fonction
de r0, l et ω.
5) Déterminer l’expression de la vitesse
f
v
, calculée dans le référentiel lié à la tige, de l’anneau lorsqu’il quitte
la tige en fonction de ω, r0, l et d’un ou plusieurs des vecteurs unitaires définis précédemment. En déduire
l’expression de la vitesse
f
v'
, calculée dans le référentiel lié au laboratoire, de l’anneau lorsqu’il quitte la
tige en fonction de ω, r0, l et d’un ou plusieurs des vecteurs unitaires définis précédemment.
On rappelle que ch2(x)-sh2(x) = 1
Deuxième partie : la tige fait un angle quelconque avec
l’axe (Δ)
La tige OA fait maintenant un angle ( < /2 rad) avec
l’axe (Δ). La tige tourne autour de (Δ) avec la vitesse
angulaire constante ω.
On repère la position de l’anneau sur la tige par la distance
r entre le point O et l’anneau M (r = OM). L’anneau est
libéré sans vitesse initiale par rapport à la tige à une
distance r0 du point O (r0 < l).
L’étude est menée dans le référentiel lié à la tige.
6) L’anneau est soumis à son poids, aux forces d’inertie
et à la réaction de la tige. Faire un schéma sur lequel
apparaissent ces forces. Ecrire l’expression vectorielle
du poids et des forces d’inertie en fonction de m, g, ω,
r, et des vecteurs unitaires définis précédemment.
7) En appliquant le principe fondamental de la
dynamique, établir l’équation différentielle vérifiée par r(t).
8) Intégrer cette équation différentielle en prenant en compte les conditions initiales définies précédemment et
déterminer la solution r(t) en fonction de r0, , g, ω et t.
9) Déterminer la position d’équilibre réq de l’anneau sur la tige. Exprimer réq en fonction de ω, et g. Montrer
qu’il ne peut exister une position d’équilibre de l’anneau sur la tige OA que si la vitesse angulaire ω est
supérieure à une valeur seuil ω0 que l’on déterminera. Exprimer ω0 en fonction de , g et l.
10) On se place dans le cas où ω > ω0, l’anneau étant dans sa position d’équilibre. On écarte légèrement l’anneau
de cette position d’équilibre. Déterminer, en la justifiant, l’orientation de la résultante des forces appliquées à
l’anneau ? En déduire si l’équilibre est stable ou instable.
Exercice n° 2 : (d’après Mines 2003, parties A et B indépendantes)
La Terre possède un seul satellite naturel : la Lune. De nombreux satellites artificiels sont par ailleurs placés en
orbite autour de la Terre, dans des buts variés tels que les télécommunications, la météorologie, la défense…
Cette partie se propose d’étudier quelques caractéristiques du mouvement des satellites terrestres. Dans cette
partie, on désignera par MT et RT respectivement la masse et le rayon de la Terre.
On donne RT = 6370 km, MT = 5,98.1024 kg.
On rappelle que la constante de gravitation universelle a pour valeur G = 6,67.10-11 N.m².kg-2.
A. Quelques aspects de la satellisation
En l’absence de précision explicite, on négligera tout frottement dû à l’atmosphère sur le satellite.
A.1. On s’intéresse à un satellite artificiel, de masse m, en orbite circulaire de rayon R autour de la
Terre.
A.1.a. Justifier que le mouvement du satellite autour de la Terre est plan.
A.1.b. Montrer que le mouvement du satellite autour de la Terre est uniforme, et exprimer littéralement la
vitesse v0. On exprimera d’abord v0 en fonction de G, MT et R, puis en fonction de g0, RT et R, où g0
désigne l’intensité du champ de pesanteur terrestre à la surface de la Terre.

TSI 1 2009-2010
Lycée Pierre-Paul Riquet
3
A.1.c. Le satellite SPOT (Satellite sPécialisé dans l’Observation de la Terre) est en orbite circulaire à l’altitude
h = 832 km au-dessus de la Terre. Calculer numériquement la vitesse v0 de SPOT sur son orbite.
A.2. La vitesse de libération vl d’un satellite est la plus petite vitesse qu’il faut lui communiquer à la surface de la
Terre pour qu’il aille à l’infini (en « se libérant » de l’attraction terrestre). Exprimer vl en fonction de G, MT et
RT et calculer sa valeur.
A.3. Dans le cas d’une orbite circulaire du satellite autour de la Terre, montrer que l’énergie mécanique Em du
satellite est liée à son énergie cinétique Ec par : Em = - Ec. Si l’on tient à présent compte de la force de
frottement de l’atmosphère sur le satellite, en déduire, en le justifiant, son effet sur la vitesse du satellite.
A.4. Pour un satellite de masse m en mouvement (quelconque) autour de la Terre, et uniquement soumis à la
force gravitationnelle terrestre, l’énergie mécanique peut s’écrire de la même façon que celle d’un point
matériel en mouvement rectiligne placé dans un potentiel effectif Ep,eff(r) dont la courbe représentative est
donnée sur la figure 4 :
)(
2
1,
2rErmE effpm
avec r la distance du satellite au centre de la Terre.
Après avoir justifié que l’énergie mécanique Em du satellite est une constante de son mouvement, préciser,
pour chacune des valeurs de Em (notées de (1) à (5)) représentées sur la figure 4, la nature de la trajectoire du
satellite et celle de son état, lié ou de diffusion.
B. Mouvement de la Lune autour de la Terre
On précise que cette question ne nécessite aucune connaissance préalable d’astronomie.
B.1. Le centre L de la Lune décrit, de manière uniforme, autour de la Terre, une orbite circulaire de centre T telle
qu’en un jour le segment [TL] balaie un angle de 0,230 radian.
B.1.a. Déterminer, en jours, la période TL de ce mouvement circulaire de la Lune autour de la Terre.
B.1.b. Etablir la 3ème loi de Kepler (relation entre période du mouvement et rayon de la trajectoire) dans le
cas d’un mouvement circulaire
B.1.c. Sachant que le rayon RTL de l’orbite circulaire décrite par la Lune est de 3,84.105 km, en déduire la
valeur de la masse de la Terre. Le résultat est-il cohérent avec les données ?
B.2. On sait que la Lune, dans son mouvement autour de la Terre, nous présente toujours la même face. En
déduire les caractéristiques du mouvement propre de la Lune.
B.3.
B.3.a. Le schéma (I) de la feuille annexe représente les différentes phases de la Lune. On dit que la Lune est
nouvelle lorsque la face qu’elle présente à la Terre n’est pas éclairée. Identifier la nouvelle Lune sur
ce schéma, et préciser comment elle est alors vue depuis la Terre.
B.3.b. Le cycle des phases de la Lune, appelé lunaison, dure TN = 29,5 jours. Pour expliquer la différence
entre cette durée, et la période du mouvement circulaire de la Lune autour de la Terre, on doit
prendre en compte le mouvement de la Terre autour du Soleil. Sur le schéma (II) de la feuille annexe,
dessiner les positions de la Lune lors des nouvelles lunes successives à t et t + TN. Dessiner aussi la
position de la lune à la date t + TL. Sachant que la Terre est en orbite circulaire de période TT = 365
jours autour du Soleil, retrouver la valeur de TN = 29,5 jours pour la lunaison.

TSI 1 2009-2010
Lycée Pierre-Paul Riquet
4
1
/
4
100%