Convergence de l`algorithme du perceptron { }

Convergence de l’algorithme du perceptron
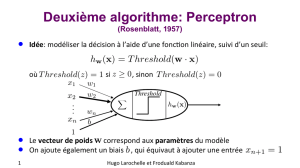
On considère un perceptron correspondant à une fonction
{
}
: 1,1
p
f
→ −
ℝ
déterminée par
1 1
1
1 si 0
( , , ) 1 sinon
p p
p
x x
f x x
ω ω θ
+ + + ≥
=
−
⋯
…
Rq : La fonction est à valeurs dans
{
}
1,1
−
au lieu de
{
}
0,1
pour faciliter l’exposé, mais cela ne change rien
au fond de l’étude…
On se donne un ensemble d’apprentissage
{
}
1 1
( , ), ,( , )
N N
A x y x y=…
avec pour chaque
{
}
1, ,
i N
∈
…
,
1
( , , )
i i i p
p
x x x
= ∈
… ℝ
et
{
}
1, 1
i
y
∈ −
la réponse attendue par le perceptron.
Déf : On dit que la base d’apprentissage
A
est linéairement séparable s’il existe des coefficients
{
}
1
( , , ) \ (0, ,0)
p
p
ω ω
∈
… ℝ …
et
θ
∈
ℝ
tel que
1 1
1 , sgn( )
i i i
p p
i N y x x
ω ω θ
∀ ≤ ≤ = + + +
⋯
en posant
1 si 0
sgn( ) 0 si 0
1 si 0
x
x x
x
≥
= =
− <
Pour alléger les notations, on va poser
0
θ ω
=
et convenir
0
1
i
x
=
pour chaque
{
}
1, ,
i N
∈
…
de sorte que les
expressions
1 1 p p
x x
ω ω θ
+ + +
⋯
s’écrivent plus légèrement
0 0 1 1
p p
x x x
ω ω ω
+ + +
⋯
La définition du perceptron se ramène alors la détermination d’un vecteur synaptique
1
0 1
( , , , )
p
p
ω ω ω ω
+
= ∈
… ℝ
L’algorithme d’apprentissage du perceptron est alors le suivant :
On choisit arbitrairement un vecteur synaptique
0 1
n
ω
+
∈
ℝ
.
Tant que les réponses produites ne sont pas toutes correctes :
on choisit un exemple
( , )
i i
x y
dans la base d’apprentissage.
Si la réponse produite par le perceptron sur cet exemple est incorrecte Alors
on modifie chaque poids synaptiques par la relation :
1
:
t t i i
j j j
y x
ω ω
+
= +
Fin Si
Fin Tant que

Théorème :
Si la base d’apprentissage est linéairement séparable, cet algorithme s’arrête et détermine donc un
perceptron solution.
dém. :
Puisque la base est linéairement séparable, il existe un vecteur
0 1
( , , , )
p
ω ω ω ω
∗ ∗ ∗ ∗
=
…
non nul tel que
0 1 1
1 , sgn( )
i i
i p p
i N y x x
ω ω ω
∗ ∗ ∗
∀ ≤ ≤ = + + +
⋯
Pour alléger les notations, introduisons
(
)
.|.
le produit scalaire canonique sur
1
p
+
ℝ
. On a donc
(
)
1 , sgn |
i
i
i N y x
ω∗
∀ ≤ ≤ =
avec rappelons-le
1
(1, , , )
i i i
p
x x x
=
…
.
Posons
(
)
1
min | 0
i
i n
xδ ω
∗
≤ ≤
= >
et
1
max
i
i n
M x
+
≤ ≤
= ∈
ℝ
Si par l’absurde, l’algorithme précédent ne s’arrête pas, il construit une suite infinie de vecteurs
( )
t
t
ω
∈
ℕ
avec la
propriété
1
t t i i
y x
ω ω
+
= +
lorsque la réponse du percepton défini par le vecteur synaptique
t
ω
n’est pas bonne sur l’exemple
( , )
i i
x y
.
D’une part
(
)
(
)
(
)
(
)
(
)
(
)
1
| | | | sgn | |
t t i i t i i
y x x x
ω ω ω ω ω ω ω ω ω
+ ∗ ∗ ∗ ∗ ∗ ∗
= + = +
donc
(
)
(
)
(
)
(
)
1| | | |
t t i t
x
ω ω ω ω ω ω ω δ
+ ∗ ∗ ∗ ∗
= + ≥ +
puis par récurrence
(
)
(
)
0
| |
t
t
ω ω ω ω δ
∗ ∗
≥ +
(1)
D’autre part
(
)
2 2 2
12 |
t t i t i i
y x x
ω ω ω
+
= + +
Or
( | ) 0
i t i
y x
ω
≤
car la réponse fournie par le perceptron donné par le vecteur synaptique
t
ω
est supposée
incorrecte sur l’exemple
( , )
i i
x y
et donc
2 2 2 2
1 2
t t i t
x M
ω ω ω
+
≤ + ≤ +
puis par récurrence
2 2
0 2
t
tM
ω ω≤ +
(2)
Par l’inégalité de Cauchy-Schwarz
( | )
t t
ω ω ω ω
∗ ∗
≤
donc (1) et (2) donnent
(
)
2
0 0 2
|
t tM
ω ω δ ω ω
∗ ∗
+ ≤ +
ce qui est incompatible avec un passage à la limite à l’infini : par exemple en divisant par
t
avant de faire tendre
t
vers
+∞
, on obtient
0
δ
≤
qui est contraire aux hypothèses de travail.
1
/
2
100%