3 L`équipement de la machine

1

2
Pour utiliser au mieux cette merveilleuse machine à distribuer les soins qu’est
l’hélicoptère il faut maitriser quelques notions techniques et réglementaires qui en
régissent le fonctionnement.
Les paragraphes qui vont suivre ont pour objet d’éclairer celui qui veut entreprendre
d’utiliser l’hélicoptère au service de ses patients.
Mais avant de parler technique il faut être d’accord sur une philosophie d’emploi :
l’hélicoptère pour quoi faire ?
Les idées qui vont être exposées plus bas ne tendent à servir qu’un seul objectif :
faire correspondre, à l’aide d’un transfert médicalisé, partout dans notre pays, la
pathologie d’un patient donné avec le plateau technique capable de la prendre
en charge, quelle que soit l’heure et quelles que soient les conditions
météorologiques.
L’hélicoptère doit devenir dans la palette du soignant un outil de soin comme un
autre et non plus une machine bruyante, chère et dangereuse réservée à des
missions exceptionnelles de sauvetage de vie humaine.
Deux constatations guident cet argumentaire :
- Les conditions de la médecine d’aujourd’hui sont telles qu’il est nécessaire
de concentrer les unités de soins pour en accroître la fiabilité, la qualité, la
rentabilité, alors que la démographie médicale est en crise. Toute
économie de temps médical est un bénéfice pour le système de soins tout
entier.
- Un hélicoptère est une machine dont les frais fixes représentent près de
80% du budget, il ne sert donc à rien, si on en dispose, de
« l’économiser », au motif que le patient présente une pathologie peu

3
grave (pour peu qu’il nécessite toutefois une surveillance médicale pendant
son transfert).
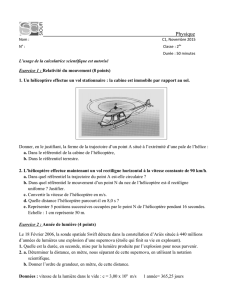
1 Comment ça marche : densité de l’air, température,
altitude, masse, vitesse. Domaine hauteur vitesse.
L’hélicoptère est une machine complexe qui est maintenue en l’air grâce à la rotation
de son rotor principal. Le rotor de queue ne servant qu’à équilibrer le couple de
rotation en lacet (dans le plan horizontal) généré par le rotor principal.
La puissance est donnée par le ou les moteurs. Le plus souvent sur les machines qui
nous concernent il s’agit de turbines. La réglementation nous en impose deux pour
minimiser les risques de panne moteur.
L’efficacité (puissance) du rotor principal varie selon de nombreux facteurs. Cette
« hélice » se « visse » dans un gaz qui est l’air. Selon la « solidité » de ce dernier
(densité) la puissance sera plus ou moins grande.
- Plus l’air est chaud (donc moins dense) moins le rotor est efficace.
- Plus l’altitude est élevée (donc l’air plus rare) moins la puissance
disponible est grande.
La chaleur et l’altitude sont les deux grands facteurs qui limitent la puissance des
hélicoptères.
La puissance nécessaire varie également en fonction de la vitesse de l’aéronef. En
effet au-delà d’une certaine vitesse le disque rotor se comporte comme une aile et
génère une certaine portance qui permet de diminuer la puissance demandée au
moteur tout en gardant la même altitude. Cette portance naît dès qu’une certaine
vitesse est atteinte : c’est la « vitesse d’accrochage ».
Cette notion permet de décrire plusieurs régimes de vol de l’hélicoptère :
- Le vol stationnaire : la vitesse est inférieure à la « vitesse d’accrochage »,
la portance n’est donnée que par la puissance du moteur.
Les puristes décrivent deux sous catégories de ce vol :
• le vol stationnaire dans l’effet de sol ou la puissance
nécessaire est un peu moindre du fait de la proximité du sol
et
• le vol stationnaire hors effet de sol qui est le seul qui
caractérise vraiment une machine.
- Le vol « en route » : la portance est générée par le moteur augmentée de
celle de l’effet d’aile du rotor.
Il est évident que cette puissance disponible pour faire voler la machine s’applique à
un élément variable qui est le poids total de l’aéronef.
Ce poids comprend
• une part fixe : le poids de l’hélicoptère lui-même

4
• une part variable : le poids de l’équipage, celui du matériel
emporté et enfin celui du carburant nécessaire pour la
mission (Un litre de kérosène pèse 0,8 Kg).
On comprendra donc au décours de ces quelques lignes que la performance d’un
hélicoptère est éminemment variable selon l’altitude, la température et la masse
considérée au moment de la mission.
Le « domaine hauteur-vitesse ».
La sécurité est l’obsession de tous ceux qui s’occupent d’hélicoptère tant le vol de
cet étrange engin n’est possible que dans d’étroites conditions.
La sécurité du vol est pour une grande part liée à la portance du rotor, elle-même
strictement dépendante du nombre de tours par minute qu’il effectue.
Cette portance peut être modulée par la variation de l’angle d’incidence des pales
que le pilote règle en agissant sur un levier appelé « pas collectif ».
Cette variation permet :
- soit de transformer la puissance du moteur en portance, en augmentant cet
angle,
- soit au contraire, si la puissance moteur défaille, de transformer l’énergie
cinétique du rotor en portance en réduisant cet angle, cela s’appelle l’autorotation.
(Pour information le pilote dispose d’une seconde commande le « pas cyclique », le
classique « manche à balai » qui lui permet d’incliner le rotor vers l’avant, l’arrière, à
droite ou à gauche pour faire respectivement avancer la machine en avant, en
arrière, à droite ou à gauche).
Pour qu’un hélicoptère monomoteur vole en sécurité, il faut :
- soit qu’il ait une altitude suffisante (souvent aux environ de 500 pieds, ou
150 mètres) pour pouvoir en cas de panne faire une autorotation en
transformant sa hauteur en « tours/minute»,
- soit qu’il ait acquit une vitesse suffisante (souvent voisine de 60 Nœuds ou
100 Km/h) pour la transformer, elle aussi, en « tours/minute».
Il existe donc un domaine de vol (en dessous d’une certaine altitude et/ou en deçà
d’une certaine vitesse) où la sécurité n’est pas assurée en cas de panne moteur.
C’est le « domaine hauteur vitesse ».
La solution à ce problème est double :
- multiplier le nombre des moteurs en leur donnant une puissance suffisante
- écrire des procédures de décollage et d’atterrissage pendant les quelles
l’aéronef ne rentre pas dans, cette zone que certains ont appelé (à tort), la
« zone de mort ».
Un décollage en sécurité (avec un monomoteur) se fait , après avoir acquis le
stationnaire près du sol, en prenant de la vitesse horizontalement pour atteindre la
« vitesse d’accrochage » et en ne prenant d’altitude que dans un deuxième temps.

5
Ceci permettra de franchir en sécurité les éventuels obstacles situés devant la
machine sans courir le risque de n’avoir pas assez de puissance disponible pour le
faire et sans pénétrer dans le « domaine hauteur vitesse ».
S’il décolle d’un point haut (terrasse) le pilote n’aura aucune difficulté à acquérir cette
vitesse puisque, par définition, il n’aura pas d’obstacle devant lui.
C’est indiscutablement (et paradoxalement pour les non initiés) l’aire de décollage
qui est la plus sûre particulièrement en zone habitée !
Les différents profils de décollage découlent de ces considérations.
2 Les performances
La réglementation reconnait trois classes de performances, ce sont des règles
opérationnelles et non des critères de certification.
La classe trois correspond au cas où, en cas de panne d’un moteur au décollage
l’hélicoptère n’a que le choix de se poser immédiatement en sécurité car il ne
dispose pas de la puissance nécessaire pour faire autre chose. C’est par définition la
classe de tous les monomoteurs.
S’il a pu atteindre avant la panne une certaine altitude ou s’il a acquis une certaine
vitesse, il pourra se poser en « autorotation » sans dommage pourvu que le terrain
situé sous lui soit dégagé (sinon l’atterrissage occasionnera certainement des
dommages à l’équipage et à la machine).
La classe deux correspond au cas où, s’il se produite une panne d’un moteur au
moment du décollage ou de l’atterrissage, l’hélicoptère doit se reposer, mais il
dispose de suffisamment de puissance pour le faire sans dommage.
C’est le cas des bimoteurs limités en motorisation par construction ou par les
conditions contextuelles (chaleur, altitude, masse).
La classe un correspond au cas où, s’il survient une panne d’un moteur au moment
du décollage, l’hélicoptère peut se reposer ou continuer son vol en choisissant un
point de poser approprié pour reprendre contact avec le sol sans dommage.
Parmi les multi moteurs de classe Un il existe deux catégories A et B :
- La catégorie A indique que certains systèmes essentiels électriques
(alimentation en carburant) et hydrauliques sont dupliqués augmentant la
sécurité de l’appareil,
- La catégorie B ne possède pas cette duplication et, de ce fait, ne doit pas
être utilisé en transport sanitaire.
Ces classes de performances sont évidemment à considérer en fonction de l’altitude,
de la température et de la masse de l’appareil au moment de la mission.
Un hélicoptère puissant peut parfaitement être de classe un de performance au
niveau de la mer à 20 degrés centigrades à une certaine masse mais être de classe
trois en altitude ou par forte chaleur ou encore à une masse supérieure !
Il ne faut pas dire qu’un hélicoptère est de performance 1, 2 ou 3 mais qu’il est
exploitable en classe de performance 1, 2 ou 3 dans telles ou telles conditions.
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%