a + b - L3I.MG BlogUp

21/02/07
21/02/07 B. Miramond – Université de Cergy
B. Miramond – Université de Cergy 1
1
Chapitre 1.
Chapitre 1.
Organisation de l’ordinateur
Organisation de l’ordinateur

21/02/07
21/02/07
2
2
Objectif
Objectif
A terme comprendre l’architecture de la future
A terme comprendre l’architecture de la future
machine à pile (processeur Java).
machine à pile (processeur Java).
Pour cela, il faut comprendre comment s’exécutent les
Pour cela, il faut comprendre comment s’exécutent les
instructions d’un processeur : cycle d’exécution
instructions d’un processeur : cycle d’exécution
machine.
machine.
Cette exécution doit être contrôlée, notion de
Cette exécution doit être contrôlée, notion de
contrôleur, et dans le cas multi-cyles, notion de
contrôleur, et dans le cas multi-cyles, notion de
séquenceur.
séquenceur.
Ce séquenceur sera implanté comme un
Ce séquenceur sera implanté comme un
microprogramme dans l’architecture PicoJava, donc
microprogramme dans l’architecture PicoJava, donc
étude des différentes implantations de contrôleur.
étude des différentes implantations de contrôleur.

21/02/07
21/02/07
3
3
Plan
Plan
I.
I. Cycle d’exécution machine
Cycle d’exécution machine
II.
II. Structure en couches de l’ordinateur
Structure en couches de l’ordinateur
III.
III. Rappels sur les composants du processeur
Rappels sur les composants du processeur
IV.
IV. Implémentation temporelle
Implémentation temporelle
1.
1. Mono-cycle
Mono-cycle
2.
2. Multi-cycle
Multi-cycle
3.
3. Pipeline
Pipeline
V.
V. Implémentation du contrôleur
Implémentation du contrôleur
1.
1. Architecture RISC
Architecture RISC
2.
2. Décodage des instructions
Décodage des instructions
3.
3. Microprogrammation
Microprogrammation
VI.
VI. Exemple du MIPS R3000
Exemple du MIPS R3000

21/02/07
21/02/07 B. Miramond – Université de Cergy
B. Miramond – Université de Cergy 4
4
I. Cycle d’exécution machine
I. Cycle d’exécution machine

21/02/07
21/02/07
5
5
1. Les rappels :
1. Les rappels :
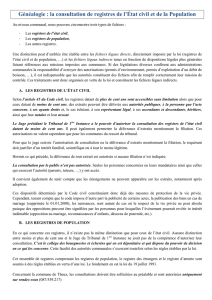
Architecture de Von Neumann (1952)
Architecture de Von Neumann (1952)
Mémoire (4096 mots de 40 bits)
(4096 mots de 40 bits)
Unité de
commande
Unité
arithmétique
et logique
Entrées Sorties
Accumulateur
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
1
/
108
100%