Nouveaux concepts d`utilisation des caméras

Nouveaux concepts d’utilisation des caméras
CamNum V2 pour des applications
de recherche en télédétection
DOTA
P. Chervet & J. Duffaut
Onera - Département d'Optique Théorique et Appliquée
Patrick.Chervet@onera.fr - Joel[email protected]

Présentation JR IGN 2011
DOTA
2
Nouveaux concepts d
’
utilisation des cam
é
ras
CamNum V2 pour des applications
de recherche en télédétection
Plan de la présentation
Concept de base: caméras IGN et coopération Pelican (2001)
Concept appliqué à une étude radiométrique: multispectral 8 voies (2004)
Concept appliqué à une étude géométrique: prises de vues stéréo (2006)
Projets Onera: pods Sethi – Socrates (2010)
Concept appliqué à l’exploitation camV2 hors de la cellule avion (2010)

Présentation JR IGN 2011
DOTA
3
Un point commun ?
QUI ? QUOI ? COMMENT ?
IGN Photogrammétrie, carto. Méthodes géométriques
Onera Détection, reconnaissance Méthodes radiométriques
Cnes Préparation futurs satellites Simulation d'image
DONNÉE D'ENTRÉE DES ETUDES
L'IMAGE AÉROPORTÉE
La recherche en télédétection…

Présentation JR IGN 2011
DOTA
4
PELICAN – Une structure de coopération
Création de la structure PELICAN (2001)
P
Plateforme
lateforme E
Et
tL
Log
ogI
Iciels
ciels de
de C
Cameras
ameras A
Aé
éroport
roporté
ées
es N
Num
umé
ériques
riques
Tous : Se doter de types d'images propres à ses études
Maîtriser la qualité image
Mise en commun des compétences et des moyens (2000)
IGN : Études et réalisations de caméras
Étalonnages géométriques
Opérations aéroportées production et recherche
CNES : Spécifications de données images pour simulations satellites
ONERA : Étalonnages radiométriques
Opérations aéroportées spécifiques à la recherche

Présentation JR IGN 2011
DOTA
5
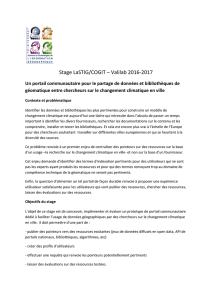
PELICAN – Configuration de base IGN
Bandes spectrales R, V, B et PIR
Largeur de filtres : 80 nm à 300 nm
Résol. spatiale : 40 cm à 60 cm
Direction de visée : nadir
Longueur focale : 45 mm à 60 mm
Système imageur 4 voies
Matrices CDD - 16 Mpixels/voie
Sensibilité spectrale : ~ 0,4 à 0,9 µm
Anti-éblouissement – 12 bits/pix.
Compensation de filé temps réel
Beechcraft 200 IGN Exemple de config. prod. IGN
(~2002)
Configuration camV1 du LOEMI
(~2002)
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
1
/
42
100%