Physique 4ème : Cinématique, Dynamique et Optique

1
Athénée Bracops-Lambert
Physique 4ème (1h)
CASTELLANO 2013 - 2014

2
Programme de 4
ème
Physique 1h
1
ère
partie : L’Optique
Réflexion, réfraction de la lumière
Propriétés des lentilles
Instruments d’optiques
2
ème
partie : FORCES ET MOUVEMENTS
Chapitre I : Généralités sur les mouvements
La Cinématique
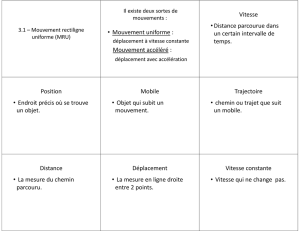
Chapitre II : Le mouvement rectiligne uniforme (M.R.U)
Chapitre III : Le mouvement rectiligne uniformément varié (MRUV)
Chapitre IV : Composition de deux mouvements rectilignes.
La Dynamique
Chapitre V : Les Forces
Chapitre VI : Les Lois de Newton

3
Programme de 4
ème
Physique 1h de Janvier à Avril
Chapitre I : Généralités sur les mouvements
1.1 Notion de mouvement
1.2 Système de référence ou référentiel
1.3 Repos, mouvement et position
1.4 Les grandeurs caractéristiques
La notion de mobile ponctuel
La trajectoire d’un mobile
Le déplacement d’un mobile
La durée
La vitesse moyenne (Vm)
Chapitre II : Le mouvement rectiligne uniforme (M.R.U)
1. Définition
2. Exemples de MRU
3. Etude d’un mobile en MRU
4. Les lois du M.R.U
5. Exemples de MRU
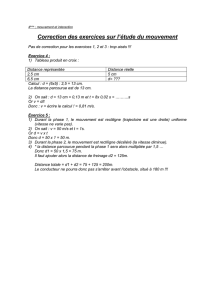
6. Méthode de résolution algébrique d’un problème
7. Exercices
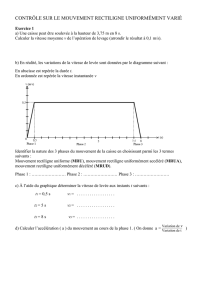
Chapitre III : Le mouvement rectiligne uniformément varié (MRUV)
1. Observation
2. Les grandeurs caractéristiques
a) La vitesse instantanée
b) L’accélération
3. Le mouvement rectiligne uniformément varié (M.R.U.V)
a) Définition M.R.U.V
b) Lois du M.R.U.V
4. Récapitulatif des mouvements rectilignes
5. Exercices

4
Introduction
La physique décrit la matière et l’espace, leurs propriétés et leurs comportements. La physique est
donc la science qui étudie les propriétés de la matière, de l’espace, du temps et qui établit les lois
qui rendent compte des phénomènes naturels. D'ailleurs le mot « physique » vient du grec « phusikê
» qui signifie « nature ».
La grande variété des phénomènes naturels impliqua leurs classements en plusieurs branches
principales, notamment : la Mécanique des solides, la Mécanique des fluides, la Thermodynamique,
l’Optique, l’Électromagnétisme, la Mécanique relativiste, la Théorie de la relativité générale, la
Mécanique quantique, la Physique des particules.
Le programme de la quatrième année comporte l’étude des chapitres suivants :
1. La cinématique
2. La dynamique
3. Les lois fondamentales de l’optique
Notre exploration du monde de la physique commencera donc par l’étude des mouvements
qu’on appelle la « cinématique ».
1. Naissance de la physique classique
La physique classique prend naissance entre les XVI
e
et XIX
e
siècles. Elle comprend quatre grands
domaines :
La mécanique : l’étude des mouvements des corps matériels
L’optique : l’étude des phénomènes lumineux
La thermodynamique : l’étude des transferts d’énergie entre corps matériels
L’électromagnétisme : l’étude des phénomènes électriques et magnétiques.
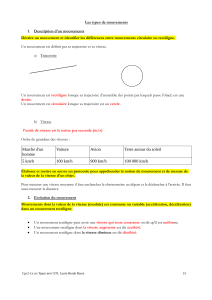
2. Les différentes parties de la mécanique
La figure suivante montre la place de la mécanique dans la physique classique :
La mécanique est la partie de la physique qui permet de décrire et de comprendre les mouvements
des corps matériels.
La cinématique est la partie de la mécanique qui décrit les mouvements sans envisager les causes,
les circonstances et les effets de ces mouvements.
La dynamique est la partie de la mécanique qui cherche à expliquer les causes des mouvements.
La statique est la partie de la mécanique qui s’intéresse aux situations caractérisées par l’absence de
mouvement.

5
Chapitre I : Généralités sur les mouvements
1.1 Notion de mouvement
Quand pouvons-nous dire qu’un objet est en mouvement ?
Nous considérons qu’un objet sur une table est au repos parce que :
……………………………………………………………………………………………….
Ce même objet, pour un observateur situé dans un satellite en orbite autour de la terre est
en……………….
Pour décrire le mouvement d’un corps, il faut préciser par rapport à quel repère on l’observe. Ce
repère est appelé référentiel. Les notions de repos et de mouvement dépendent donc du référentiel.
1.2 Système de référence ou référentiel
Un système de référence (ou référentiel) est :
……………………………………………………………………………………………………..
L’ensemble de 3 axes orthogonaux 2 à 2 (x,y,z) d’origine 0 permet de définir la position d’un point P
par un triplet de coordonnées (a,b,c).
La position d'un point matériel ( P ) dans l'espace est donc repérée, par rapport à un ensemble de
trois axes rectangulaires orientés (OX, OY, OZ).
Cette manière de localiser les points dans l’espace a été proposée par Descartes dans sa
«géométrie». Ce système de référence est appelé un référentiel cartésien.
Généralement, les systèmes de référence sont établis en fonction de la Terre. Lorsque le centre de la
Terre est choisi comme origine du repère, nous parlons de repère ……………………………….
Cependant d’autres référentiels peuvent être choisis : certains satellites en mouvement, le Soleil ou
encore des étoiles dites fixes. Dans ce cas où le choix se porte sur le Soleil, nous parlons de repère
……………………………..
Le solide de référence est choisi de manière à simplifier au maximum l'étude des mouvements.
• Dans la plupart des problèmes courants, le solide de référence est la terre ou un objet fixe
par rapport à la terre (bâtiment ....).
• Lorsqu'on étudie le mouvement d'un objet dans un véhicule en mouvement, le solide de
référence peut être ce véhicule.
• Pour l´étude du mouvement des planètes du système solaire on utilise le soleil comme
système de référence.
Z
X
Y
P
z
y
x
O
Solide
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%