Chapitre 1 Introduction à l`architecture des systèmes informatiques

Lycée Gaston CRAMPE - 40800 AIRE sur l’ADOUR
Section de Techniciens Supérieurs en
Informatique et Réseaux pour l’Industrie et les
Services Techniques
STS IRIS
ARCHITECTURE MATERIELLE
DES SYSTEMES INFORMATIQUES
Partie 1
Chapitre 1 : Introduction à l'architecture des systèmes informatiques
Chapitre 2 : Représentation des informations
Chapitre 3 : La programmation
Chapitre 4 : Le processeur
Chapitre 5 : Les mémoires
Chapitre 6 : décodage d'adresses
Chapitre 7 : Introduction à la gestion des Entrées-Sorties
J-Cl. CABIANCA

Architecture matérielle des systèmes informatiques Jean-Claude CABIANCA
Chapitre 1
Introduction à l’architecture des systèmes informatiques
1 - Introduction
•Un système informatique est l'ensemble des moyens logiciels (Software) et matériels
(Hardware) nécessaires pour satisfaire les besoins informatiques de l'utilisateur.
•L'architecture d'un système informatique est la description de ses unités fonctionnelles et de
leurs interconnexions.
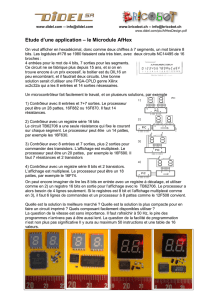
•La configuration habituelle d’une station de travail est donnée ci-dessous :
-Le CPU (Central Process Unit) correspond au moteur de la machine. Il exécute les
instructions des programmes.
-La mémoire centrale contient les programmes et les données à traiter.
-Le clavier, la souris et l’écran permettent l’interaction avec les utilisateurs.
-Le disque dur, le disque optique (CD, DVD….) et l’unité de disquettes permettent le
stockage permanent des informations.
-Le MODEM (Modulateur - DEModulateur) permet de communiquer avec d'autres ordinateurs
éloignés en utilisant une ligne téléphonique.
-Le FAX permet d'envoyer une image numérique par l’intermédiaire d'une ligne téléphonique.
-Le Digitaliseur (Scanner) permet de digitaliser des documents, c'est à dire de transformer une
image en une forme numérique.
-La sortie RNIS (Réseau Numérique à Intégration de Services) ou NUMERIS utilise
directement une ligne numérique contrairement au FAX et au Modem.
-La carte réseau permet de communiquer avec d'autres ordinateurs éloignés en utilisant un
support Ethernet.
Chapitre 1 : Introduction à l’architecture des systèmes informatiques Page 1/14

Architecture matérielle des systèmes informatiques Jean-Claude CABIANCA
2 – Les réseaux
•L'avènement des réseaux ( Networks ) a permis de relier différents ordinateurs. Ces
ordinateurs peuvent être soit groupés dans un voisinage, par exemple le même bâtiment, c’est ce
que l'on appelle un réseau local, soit dispersés de par le monde.
•La notion de réseau est importante car un réseau permet de relier un grand nombre d'ordinateurs
entre eux et ainsi d’offrir aux utilisateurs des fonctionnalités de communication et de mise à
disposition d'un énorme potentiel d'informations.
3 - Utilisation des ordinateurs
•L’utilisation d’un ordinateur sous-entend l'exécution d’un programme par celui-ci, c’est
pourquoi toute application nécessite du matériel, en l'occurrence un ordinateur, et du logiciel
qui est exécuté par cet ordinateur.
•Le logiciel se décompose en deux familles :
-Les programmes systèmes;
-Les programmes d'application.
•Les fonctions de base d'un ordinateur sont réalisées au moyen de programmes système.
•Le système d'exploitation (OS : Operating System), le plus important des programmes
système, s'occupe de gérer les différentes ressources de la machine. Il facilite la tâche du
programmeur en lui offrant un accès simplifié aux ressources de la machine.
Chapitre 1 : Introduction à l’architecture des systèmes informatiques Page 2/14

Architecture matérielle des systèmes informatiques Jean-Claude CABIANCA
4 - Le matériel
4.1 - Introduction
•Les ordinateurs ont d'abord été des machines à calculer. En effet, les mathématiques
permettent entre autres choses, de définir une algèbre sur des grandeurs binaires (Algèbre de
Boole) avec des propriétés très intéressantes.
•Les grandeurs binaires peuvent se matérialiser très simplement (0 ou 1 = Absence ou
Présence de courant électrique), ce qui fait que dés que l’on a pu manipuler rapidement des
ensembles suffisamment importants d’éléments binaires (bits), on a pu réaliser des calculateurs
puis des ordinateurs.
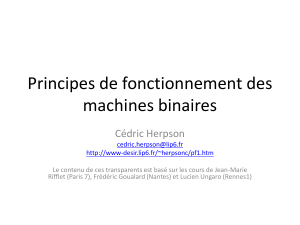
•La figure ci-dessous permet de préciser l'architecture interne d'un ordinateur :
4.2 - Le processeur
•C'est l'organe de contrôle. Tout traitement (opération logique ou arithmétique) se fera dans le
processeur.
•Celui-ci manipule les octets (ensemble de 8 bits), qui circulent sur un ensemble de fils appelé
Bus de données. Ces mots circulent entre le processeur et les mémoires ou les interfaces
d'Entrées / Sorties (E / S).
•Le processeur considère que chaque octet est rangé dans un endroit qu’il peut repérer et
atteindre que nous appellerons provisoirement " Tiroir " dont le nombre de casiers correspond au
nombre de bits. Chaque tiroir sera connu du processeur par un numéro qui permettra de l'ouvrir,
lui et lui seul.
•On appelle ce numéro, l'adresse du tiroir et il sera véhiculé par le bus d'adresses dont la
largeur (son nombre de fils) dépendra du nombre d'adresses que le processeur pourra produire.
Chapitre 1 : Introduction à l’architecture des systèmes informatiques Page 3/14

Architecture matérielle des systèmes informatiques Jean-Claude CABIANCA
Remarques :
-Le bus de données est bidirectionnel : le processeur peut " remplir " (écrire dans) ou " vider "
(lire dans) tout tiroir.
-Le bus d'adresses est unidirectionnel : le processeur indique le numéro du tiroir qu'il veut
actionner.
-Un bus est caractérisé par sa largeur (nombre de bits) et par sa fréquence (vitesse) ce qui
permet d’obtenir son débit théorique (en Mo ou Go par seconde).
-Il existe aussi un bus de contrôle (parfois bus de commandes) qui transporte les ordres et les
signaux de synchronisation en provenance du processeur et à destination de l'ensemble des
composants matériels (mémoires et interfaces d'entrées-sorties).
4.3 - Les mémoires.
•Puisque le processeur manipule des groupes de bits assemblés en mots, il faut déjà de la
mémoire pour le stockage des données. Mais pour exécuter ces manipulations de façon
automatique, le processeur doit recevoir des instructions correspondantes. Celles-ci seront, elles
aussi rangées dans de la mémoire lors de la programmation.
•Un ordinateur va donc comporter un certain nombre de mémoires où l'on pourra indifféremment
lire ou écrire.
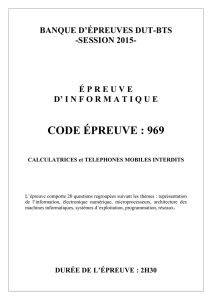
•Les différents éléments de la mémoire d’un ordinateur sont ordonnés en fonction des critères
suivants :
-le temps d’accès
-la capacité
-le coût par bit.
•Quand on s’éloigne du CPU vers les mémoires auxiliaires, on constate que le temps d’accès et
la capacité des mémoires augmentent, mais que le coût par bit diminue :
Chapitre 1 : Introduction à l’architecture des systèmes informatiques Page 4/14
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
1
/
74
100%