Définition de l`algorithme du pointage numérique Définition des

C.Taffoureau Definition algorithme de pointage Page 1/6
Définition de l’algorithme du pointage numérique
NenuFar
24/02/15
Définition des beams numériques de l’observation
Un beam numérique est défini par les paramètres suivants :
Direction de pointage
La liste des beamlets -> liste des subband associées
Un subarray : ensemble des MR utilisés par le beam numérique.
Un timestamp de début et de fin (ou une durée).
Tous ces paramètres sont définis dans un parset file associé à une observation. Ci-dessous,
les paramètres concernant le pointage numérique :
nrBeams=2 // Number of simultaneous beams
--------------------------- Numeric Beam j -------------------------------------------
Beam[j].target= ELAIS-N1 // Field of view
Beam[j].anaBeam=k // AnaBeam number
Beam[j].angle1=4.236786759216235 // RightAscention or Azimuth in rad
Beam[j].angle2=0.9599310885968813 // Declination or Elevation in rad
Beam[j].directionType=J2000 // Coord.system used
J2000|HADEC|AZELGEO|
MERCURY|VENUS|MARS|JUPITER|SATURN|
URANUS|NEPTUNE|PLUTO|SUN|MOON|FILE
Beam[j].TrackingFile= …..
Beam[j].startTime= …
Beam[j].duration=0 // time in seconds
Beam[j].subbandList=[77..396,407..456] // vector List of all used subbands,
// from 0 to 511
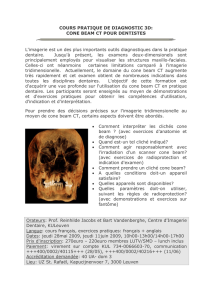
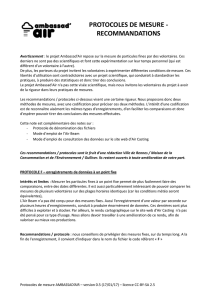
Représentation d’un point de vue physique:

C.Taffoureau Definition algorithme de pointage Page 2/6
D’un point de vue spatiale :
Subarray : ensemble de mini-réseau (MR) utilisé pour la création d’un beam numérique.
D’un point de vue fréquentielle :
Au total, une observation peut gérer 768 beamlets. A chaque beamlet correspond une
largeur de sous-bande de ~0.2 MHz (100MHz / 512 subband).
80 beamlets
150 beamlets
MR1
MR2
MR3
MR6
MR7
MR8
MR9
f
Subarray 0
Subarray 1
Beam numérique 0
Beam numérique 1
Beam numérique 3
Beam numérique 2
Beam analogique 0
Beam analogique 1
0 MHz
100 MHz
Beam 1
Beam 2
Beam 3
Beam 4
0 100 200 300 400 512 Subband
10 20 30 40 50 60 70 80 90
190 beamlets
40 beamlets
50 beamlets

C.Taffoureau Definition algorithme de pointage Page 3/6
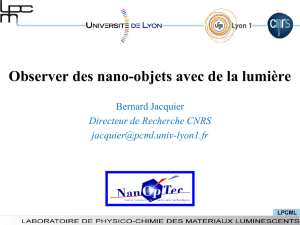
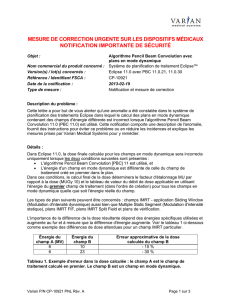
Le calcul du pointage permet de déterminer un ensemble de poids (weights) à appliquer à
chaque beamlet par rapport à sa direction de visée.
La sortie du modul e de calcul est une matrice composée d’un ensemble de poids complexe,
fixant la phase et le gain pour chaque direction de beam numérique, pour chaque MR,
chaque beamlet et chaque polarisation.
X0r0 : partie réelle du weights pour le MR0, pour le beamlet 0 et la polar X
X0i0 : partie imaginaire du weights pour le MR0, pour le beamlet 0 et la polar X
Y0r0 : partie réelle du weights pour le MR0, pour le beamlet 0 et la polar Y
X0i0 : partie imaginaire du weights pour le MR0, pour le beamlet 0 et la polar Y
weights_array
X0r0,X0i0 / Y0r0,Y0i0
X1r0,X1i0 / Y1r0,Y1i0
…….
X95r0,X95i0 / Y95r0,Y95i0
X0r1,X0i1 / Y0r1,Y0i1
X1r1,X1i1 / Y1r1,Y1i1
…….
X95r1,X95i1 / Y95r1,Y95i1
X0r2,X0i2 / Y0r2,Y0i2
X1r2,X1i2 / Y1r2,Y1i2
…….
X95r2,X95i2 / Y95r2,Y95i2
…….
…….
…….
…….
X0r767,X0i767 / Y0r767,Y0i767
X1r767,X1i767 / Y1r767,Y1i767
…….
X95r767,X95i767 / Y95r767,Y95i767
b0
b1
b2
b767
MR0 MR1 MR95
Beamlet

C.Taffoureau Definition algorithme de pointage Page 4/6
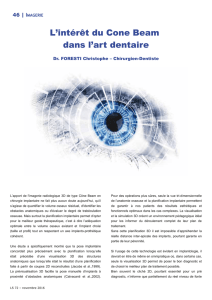
Définition de l’algorithme de pointage
Etapes principales de calcul de pointage à partir des informations extraites du parset File
Tests de la librairie Novas (langage C) à venir
Calcul de conversion
de coordonnées du
pointage
Algorithme de
pointage
Mise en forme des
weights pour envoi
vers backend
Utilisation de la librairie Novas pour faire les
conversions .
Type de pointage :
J2000|HADEC|AZELGEO|MERCURY|VENUS|
MARS|JUPITER|SATURN|URANUS|NEPTUNE|
PLUTO|SUN|MOON|FILE
Détermination des weights
Attente top
seconde

C.Taffoureau Definition algorithme de pointage Page 5/6
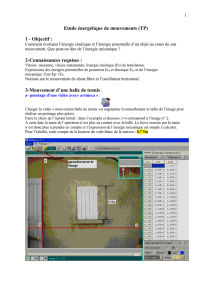
Algorithme de pointage
Calcul des weights
o
o (weights_array défini ci-dessus – p.3)
act Algo_Pointage
Récupérer paramètres Beam
numérique (beamlet,
subarray,direction de
pointage)
Récupérer paramètre de
calibration
Calculer weights
Pour chaque
beam
coefficient calibration = Nombre complexe pour un MR, par
polarisation (?) et pour une subband (récupérer dans un fichier)
Pour
chaque MR
Pour chaque
polar
FIn
Initialisation des weights
Pour chaque
beamlet
[tout les beamlets
traités]
[polar existe]
[plus de beam]
[beam
existe]
[Tous les MR traités]
[beamlet existe]
[X et Y traitées]
[MR existe]
 6
6
1
/
6
100%