Spécifications


Électronique de puissance, machines électriques,
technique d‘entraînement
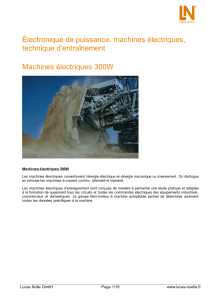
Commande de moteurs avec Matlab-Simulink 300W
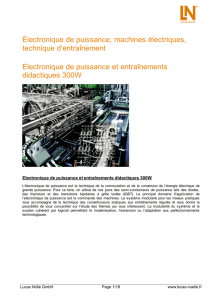
Commande de moteurs avec Matlab-Simulink 300W
Matlab permet le rapid prototyping de systèmes de commande et de régulation imbriqués. Les ébauches
peuvent d'abord être étudiées sur le PC. Puis, elles sont transmises et testées sur un matériel réel. Ce type
d'apprentissage basé sur la simulation motive et enthousiasme.
Cette méthode de design basé sur un modèle utilisé dans l'industrie permet de programmer et de tester des
systèmes d'entraînement en temps réel.
Objectifs du cours :
Mise en œuvre rapide de systèmes de processeur / « matériel dans la boucle » définis par l'utilisateur et
de reconfigurables grâce à la génération automatique des codes
Ingénierie algorithmique - comble l'espace entre la théorie et la pratique
Lucas Nülle GmbH Page 2/19 www.lucas-nuelle.fr

Pos. Désignation Bestell-Nr. Anz.
1Convertisseurs IGBT à commutation automatique CO3636-3B 1
Le système didactique sur les circuits convertisseurs à commutation
automatique permet de monter et d'étudier des circuits électroniques
de puissance avec des IGBT. Outre les semi-conducteurs de
puissance, le système comprend la commande et la mesure de
toutes les grandeurs significatives. La manipulation et
l'enregistrement des mesures s'effectuent avec des instruments
virtuels. Comme variante, le système peut également fonctionner
sans PC. Un cours multimédia interactif propose les instructions
des expériences. Le système peut être élargi par une interface
EPE 51-3 Commande de moteurs asynchrones avec
Matlab - Simulink 300W
EPE 51-3 Commande de moteurs asynchrones avec Matlab - Simulink 300W
Objectifs du cours :
Réalisation d'un système HIL dans des conditions de temps réel
Création de modèles et ébauche de la régulation orientée champ au niveau d'ébauche continu
Discrétisation de la régulation pour l'exploitation sur un DSP
Réalisation et optimisation de régulateurs de courant et de régime
Transformation de Park et Clarke
Intégration de la modulation de l'indicateur spatial pour la commande optimale des IGBT
Découplage des courants et tensions orientés champ
Saisie du régime par capteur incrémentiel
Comparaison des résultats de la simulation avec les mesures réelles
Equipement de base composé de :
Equipement de base composé de :
Lucas Nülle GmbH Page 3/19 www.lucas-nuelle.fr

Matlab. De propres applications peuvent alors être réalisées et
testées avec des composants matériels réels.
Les circuits suivants peuvent être réalisés :
Convertisseur à 1 quadrant
Convertisseur à 4 quadrants
Convertisseur de courant alternatif
Convertisseur de courant triphasé
Entraînement d'inverseurs de fréquence
Entraînement à courant continu régulé
Servocommande
L'appareil présente l'équipement suivant :
Unité de commande avec onduleur UGBT à 6 impulsions
Unité de commande et de mesure via DSP
Mesure intégrée de 3 courants et 6 tensions
Surveillance électronique et mise hors circuit en cas de
surtension et surcharge
Fonction de régulateur intégrée pour monter des
entraînements régulés
Interface avec Matlab
Fréquences MLI sélectionnable
Interface USB
Entrée pour capteur incrémentiel
Entrée analogique
Chopper de freinage intégré
Tension d'alimentation : 3 x 47 V... 400 V, 50...60 Hz
Puissance de sortie maximale : 1 kVA
Dimensions : 297 x 460 x 210 mm (h x l x p)
Poids : 5,3 kg
Les instruments virtuels permettent de commander le système au
moyen du PC. Ils permettent une manipulation intuitive ainsi que
l'enregistrement des valeurs de mesure, garantissant ainsi un
succès rapide dans l'apprentissage.
Particularités :
Réglage des paramètres depuis le PC
Mesure des courbes de temps du courant de sortie et de la
tension de sortie, avec représentation graphique dans le
diagramme de graduations horaires avec max. 20 canaux
sélectionnables
Calcul et représentation graphique des courbes de temps de
la puissance d'entrée et de sortie
Calcul des valeurs effectives, moyennes et parts alternatives
des courants et tensions ainsi que de la puissance
apparente, active (parts continues et alternatives) et réactive,
facteur de forme
Relevé automatique de la caractéristique de commande et
représentation graphique
Représentation du rapport entre toutes les grandeurs
calculées du degré de balayage
Représentation vectorielle en 3D des puissances de sortie
Analyse des signaux par FFT (Fast Fourier Transformation)
Synthèse des signaux par la réunion pas à pas des
différentes composantes sinus et cosinus
Animation, c'est-à-dire addition pas à pas des différentes
composantes d'oscillation pour démontrer la formation du
signal
Exportation des graphiques et des valeurs de mesure
Lucas Nülle GmbH Page 4/19 www.lucas-nuelle.fr

Version 32 bits pour Windows
2Bibliothèque Matlab pour commande d'électronique de puissance,
adaptateur prog. USB-JTAG inclus
CO3636-3D 1
Matlab permet le rapid prototyping de systèmes de commande et
de régulation imbriqués. Les ébauches peuvent d'abord être
étudiées sur le PC. Puis, elles sont transmises et testées sur un
matériel réel.
L'interface Matlab permet de transmettre et des projets Matlab
aux systèmes d'électronique de puissance et de les tester. La
réalisation de propres applications est facilitée par des pilotes et
des outils adaptés.
Particularités :
Interface matériel séparée pour transmettre les
applications réalisées sous Matlab
Interface USB compatible pour échanger les paramètres
et les données de mesure
Matlab permet l'enregistrement et le traitement de
grandeurs quelconques
La bibliothèque Matlab adaptée facilite l'accès au logiciel
de l'électronique de puissance
Support software in the loop
Support processor in the loop
Support hardware in the loop
Conditions requises :
Windows 7
MATLAB Version 8.0 (R2012b) ou supérieur
Simulink Version 8.0 (R2012b) ou supérieur
Embedded Coder Version 6.3 (R2012b) ou supérieur
MATLAB Coder Version 2.3 (2012b) ou supérieur
Simulink Coder Version 8.3 (2012b) ou supérieur
Code Composer Studio v5
L'ensemble comprend :
Adaptateur de programmation avec interface USB, séparation
galvanique
Boîte à outils Matlab pour l'électronique de puissance et la
régulation d'entraînement
Pilotes
Documentation (D, EN)
Lucas Nülle GmbH Page 5/19 www.lucas-nuelle.fr
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
6
7
8
9
10
11
12
13
14
15
16
17
18
19
1
/
19
100%