composition de physique–chimie - banques

ÉCOLE NORMALE SUPÉRIEURE DE LYON
CONCOURS D’ADMISSION 2012 FILIÈRE PC
COMPOSITION DE PHYSIQUE–CHIMIE – (L)
(Durée : 5 heures)
L’usage des calculatrices de poche est autorisé, y compris les calculatrices programmables et
alphanumériques ou à écran graphique, à condition que leur fonctionnement soit autonome et
qu’il ne soit pas fait usage d’imprimante.
Les candidats rédigeront impérativement chacune des deux parties, celle se rapportant à la
physique et celle se rapportant à la chimie, sur des copies distinctes et sur lesquelles ils porteront
la mention “physique” ou “chimie”. Par ailleurs, ils indiqueront très clairement les références
des questions abordées.
? ? ?
Application de la résonance magnétique nucléaire
à la caractérisation de composés chimiques
La spectroscopie par résonance magnétique nucléaire (RMN) est une technique de caractéri-
sation physico-chimique qui trouve des applications en physique, chimie, biochimie et médecine.
Son application en médecine est connue sous le nom d’imagerie par résonance magnétique nu-
cléaire (IRM). Elle permet d’obtenir une image en coupe des tissus organiques.
– Partie physique –
Principe de la résonance magnétique nucléaire
Nous nous proposons de décrire l’interaction d’un moment magnétique avec un champ ma-
gnétique et d’étudier son application en résonance magnétique nucléaire. Nous analyserons le cas
particulier où le moment magnétique est celui porté par une particule élémentaire telle qu’un
électron ou un proton. Nous établirons que le comportement dynamique de ces particules, dans
un échantillon soumis à une champ magnétique, renseigne sur leur environnement atomique.
Cette étude comprend quatre parties. La première présente le cadre général de la RMN. Les
deuxième et troisième parties s’intéressent à la résonance sous irradiation continue puis pulsée.
En dernière partie, nous aborderons quelques aspects expérimentaux. Les trois premières parties
sont liées et il est conseillé de les traiter chronologiquement. La dernière est indépendante.
Définitions.
• R0est le référentiel du laboratoire d’origine O, associé à la base orthonormée directe
(O, ~ux, ~uy, ~uz), et supposé galiléen.
• R1est le répère d’origine O, associé à la base orthonormée directe (O, ~uX, ~uY, ~uZ)qui se
déduit de R0par une rotation autour de l’axe ~uz=~uZ, de vitesse angulaire ~ω1/0=ω1/0~uz.
–Page 1/20 –

•Pour un vecteur ~
X(t)(a priori exprimé dans R1) nous avons la relation de dérivation :
d~
X
dt
R0
=d~
X
dt
R1
+~ω1/0∧~
X , (1)
•Un moment magnétique ~µ, soumis à un champ magnétique ~
B, subit de sa part un moment
~
Γ = ~µ ∧~
Bet une force ~
F=Ä~µ ·−−→
gradä~
B.
•Une fréquence (νou f) sera toujours une grandeur positive, même si elle se rapporte à une
pulsation (orientée) négative.
Constantes fondamentales.
Charge électrique élémentaire : e= 1,60 ×10−19 C
Masse de l’électron : me= 9,11 ×10−31 kg
Rapport gyromagnétique du proton : γ= 2,68 ×108s−1·T−1
Perméabilité magnétique du vide : µ0= 4π×10−7kg·m·C−2
I Introduction.
I.A Relation moment magnétique–moment cinétique.
1. Considérons un électron, de masse meet de charge qe, en mouvement circulaire uniforme
à la vitesse vet à une distance rd’un noyau placé en O(modèle planétaire). Nous notons
(~ur, ~uθ, ~uz)les vecteurs de base des coordonnées polaires tels que ~uzest perpendiculaire au
plan de la trajectoire. Exprimer le moment cinétique ~
`de l’électron par rapport au point
O, en fonction de me,ret v.
2. Nous assimilons l’orbite circulaire électronique à une boucle de courant parcourue par un
courant I. Exprimer ce courant en fonction de r,vet qe.
3. Nous notons ~µ le moment magnétique de la boucle de courant. Établir qu’il s’écrit ~µ =γc
e~
`
et exprimer le facteur gyromagnétique γc
e.
4. La mécanique quantique (relativiste) révèle que le facteur gyromagnétique de l’électron est
le double de celui obtenu par cette approche classique. En déduire la valeur numérique du
facteur gyromagnétique γede l’électron, associé à son mouvement orbital.
Ici établie pour le mouvement orbital de l’électron, la relation de linéarité entre le moment
magnétique et le moment cinétique se généralise au spin de l’électron, du proton ou du neutron.
I.B Relaxation nucléaire.
Nous considérons un échantillon de volume Vconstitué d’un ensemble de molécules organiques
comportant N protons (Hi)i∈[1,N]chimiquement identiques et indépendants. Chaque proton pos-
sède un moment cinétique ~
`iet un moment magnétique ~µi=γ~
`i(mesurés dans le référentiel du
laboratoire). Dans toute la suite, nous ne nous intéresserons qu’aux protons de l’échantillon.
–Page 2/20 –

5. Exprimer le moment magnétique global ~
Mde l’échantillon, en fonction du moment ciné-
tique des protons.
Dans la suite, ce moment magnétique global sera appelé (abusivement) “aimantation” et
noté plus simplement ~
M.
6. On applique un champ magnétique constant et uniforme ~
B0=B0~uz(B0>0) à l’échan-
tillon. Exprimer la force ~
Fiet le moment ~
Γiqu’exerce le champ magnétique sur un proton
Hi. En déduire l’équation différentielle d’évolution de l’aimantation ~
Mdans le référentiel
du laboratoire R0.
7. Justifier que le mouvement de ~
Mest une rotation de vecteur rotation ~ω0que l’on exprimera.
8. Déterminer la valeur de B0telle que la fréquence de rotation de ~
Mvaille ν0= 300 MHz.
Situer ce champ par rapport à ceux que peut produire un aimant.
9. On constate, qu’un bout d’un certain temps, l’aimantation ~
Matteint un état d’équilibre
pour lequel l’aimantation est orientée parallèlement à ~
B0en prenant la valeur ~
Meq. On rend
compte de cette relaxation en introduisant un couple supplémentaire ~
Ci=1
τÄ~
`eq −~
`iä,
subit par chaque proton Hi.
Écrire alors l’équation d’évolution de ~
Met exprimer ~
Meq en fonction de ~
`eq.
Quelle peut-être une cause possible de ce phénomène de relaxation ?
II Résonance magnétique en irradiation continue.
On applique maintenant à l’échantillon, en plus du champ ~
B0=B0~uz, un champ magnétique
~
B1, de norme constante, perpendiculaire à ~
B0, et tournant autour de l’axe Oz à la vitesse
angulaire ω, constante. On pose ~ω1=−γ~
B1.
10. Écrire l’équation d’évolution du vecteur ~
Mdans le repère du laboratoire R0.
11. Le repère tournant R1(O, X, Y, Z)se déduit de R0par une rotation uniforme de vecteur
rotation ~ω =ω~uzet tel que ~uX=~
B1/k~
B1k(B1≥0).
Établir l’équation différentielle d’évolution de ~
Mdans le repère tournant R1.
12. Nous notons (MX, MY, MZ)les composantes de ~
Mdans le repère R1. Comme à la
question (9), nous modélisons le processus de relaxation en introduisant le couple ~
C=
1
τÄM?~uZ−~
Mä, agissant sur ~
M.
En tenant maintenant compte de ce couple, établir le système d’équations différentielles
dont les composantes (MX, MY, MZ)sont solutions.
13. Le système d’équations précédent admet pour solution, en régime stationnaire :
MX=−τω1τ(ω−ω0)
1 + τ2ω2
1+τ2(ω−ω0)2M?
MY=−τω1
1 + τ2ω2
1+τ2(ω−ω0)2M?
MZ=1 + τ2(ω−ω0)2
1 + τ2ω2
1+τ2(ω−ω0)2M?
(2)
–Page 3/20 –

Relier M?àMeq en passant à la limite B17−→ 0.
Esquisser les représentations graphiques de ces composantes (fonctions de ω), rapportées
àM?. Commenter ces tracés.
14. Déterminer la valeur du produit |τω1|rendant extrémal le pic de résonance de la composante
MY. Le temps de relaxation τest, en irradiation continue, de l’ordre de 10 ms, déterminer
alors B1. Nous nous plaçons dès lors dans cette situation.
15. Déterminer la largeur fréquentielle (à mi-hauteur) de la résonance de la composante MY
puis le facteur de qualité QYcorrespondant. Commenter brièvement ce résultat.
16. Dans le repère R1et pour la résonance, représenter précisément le vecteur ~
M(toujours en
régime stationnaire).
17. Il n’est pas aisé de produire un champ tournant dans le domaine radiofréquence (RF).
Les spectromètres RMN fonctionnent en réalité avec un champ magnétique oscillant
~
B1=B0
1cos(ωt)~ux, de direction fixe dans R0, produit à l’aide d’une bobine RF. Préci-
ser pourquoi on observe cependant toujours une résonance. Indiquer ce qui est néanmoins
modifié. Exprimer B0
1“optimal”.
III Résonance magnétique en irradiation pulsée.
En pratique, les spectromètres RMN modernes n’utilisent pas le mode d’excitation continue.
Le champ magnétique ~
B1(t) = B1~uX, tournant à la pulsation ω0, n’est appliqué à l’échantillon
que pendant une séquence temporelle δT (contrôlable). On a coutume d’appeler cette excitation
une “implusion (RF)”. L’échantillon peut alors être soumis à une suite d’impulsions, espacées
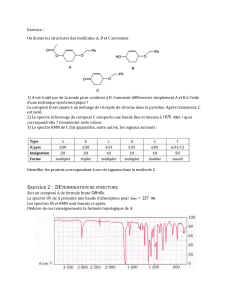
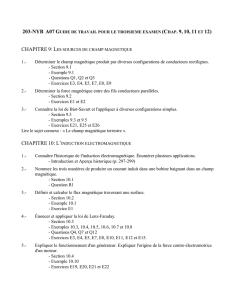
d’un certain intervalle de temps (également contrôlable). La figure (1) représente le signal de
champ, B1x(t), alors mesuré selon l’axe ~ux(fixe).
Figure 1 : Évolution temporelle de la composante, selon ~ux, du champ magnétique tournant ~
B1(t),
en mode pulsé (le nombre de cycles n’a pas été respecté afin de préserver la lisibilité du tracé).
III.A Action d’une impulsion sur l’aimantation.
18. Pour t≤0, l’aimantation est dans son état d’équilibre ~
M(t≤0) = Meq~uz, dans le seul
champ B0~uz. Nous négligeons le phénomène de relaxation pendant la séquence d’impulsion.
Écrire, dans ces conditions, les équations établies à la question (12).
Expliciter les composantes (MX(t), MY(t), MZ(t)) et décrire le mouvement de l’aimanta-
tion, observé depuis R1.
–Page 4/20 –

19. En déduire l’angle δθ dont a tourné l’aimantation, en sortie d’une implusion de durée δT .
Pour B1= 0,65 mT, déterminer la largeur d’impulsion δT90 permettant de faire basculer
l’aimantation le long de l’axe Y.
20. Après la séquence d’impulsion δT90 nous considérons l’effet de relaxation. Nous posons
t+=t−δT90.
Écrire, dans ce nouveau contexte, les équations différentielles du mouvement.
Expliciter les composantes (MX(t+), MY(t+), MZ(t+)) et décrire le mouvement de l’aiman-
tation, observé depuis R1.
21. En déduire les expressions des composantes (Mx(t+), My(t+), Mz(t+)), mesurées dans le
référentiel R0.
Représenter l’évolution temporelle de Mx(t+)(grandeur mesurée).
22. Le contenu spectral du signal Mx(t+)définit une raie du spectre RMN des protons de
l’échantillon. Comment, pratiquement, accède-t-on à ce contenu ? Par analogie avec le mo-
dèle des trains d’onde, en optique, donner la largeur naturelle δν de la raie observée.
23. Dans le cas d’une relaxation libre, le temps de relaxation τest de l’ordre de la seconde,
en général. Pour un ensemble de molécules possédant deux types de protons, résonant
aux fréquences ν1et ν2=ν1+ ∆ν, déterminer le plus petit écart de fréquence que le
spectromètre peut résoudre.
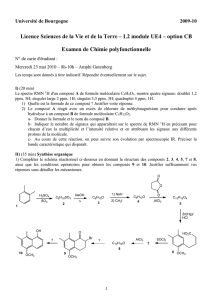
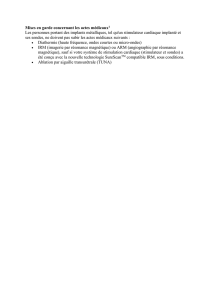
24. La figure (2) présente le spectre RMN de la molécule d’éthanol CH3CH2OH, dans le sol-
vant CDCl3, lorsque toutes les raies sont parfaitement résolues. L’axe des abscisses est
gradué en échelle de déplacement chimique δ= 106(ν−ν0)/ν0(en ppm). Un spectromètre
fonctionnant à ν0= 300 MHz permet-il d’observer la structure fine des différentes raies ?
Figure 2 : Spectre RMN de la molécule d’éthanol CH3CH2OH dans le solvant CDCl3. L’axe des
abscisses est gradué en déplacement chimique δ= 106(ν−ν0)/ν0.ν0est la fréquence de résonance
des protons d’une molécule de référence.
–Page 5/20 –
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
1
/
20
100%