Cours physique moteur courant continu

MACHINE A COURANT CONTINU
Presser la touche F5 pour faire apparaître les signets
qui favorisent la navigation dans le document.
Sommaire
1 Généralités ................................................................................................................................. 1
2 Modélisation de la machine....................................................................................................... 2
3 Expression théorique du couple électromagnétique.................................................................. 3
4 Bilan de puissance − Rendement − Couple utile....................................................................... 4
5 Réglage de la vitesse ................................................................................................................. 5
6 Notion de fonctionnement dans les quatre quadrants................................................................ 6
7 Fonctionnement en régime transitoire....................................................................................... 6
8 Machine série............................................................................................................................. 8
Exercices d'application ................................................................................................................ 10

MC 1
MACHINE A COURANT CONTINU
1 Généralités
Comme la quasi-totalité des machines tournantes, son fonctionnement repose sur l'interaction
entre deux champs magnétiques:
− Le champ inducteur, créé, soit par un bobinage alimenté en courant continu, soit par un sys-
tème d'aimants permanents, l'un comme l'autre étant placé au stator de la machine.
− Le champ induit, toujours créé par un bobinage placé au rotor.
Le bobinage d'induit devant également fonctionner en courant continu, il faut prévoir une
inversion périodique du courant qui le traverse ou de la tension aux bornes, sinon,
− en fonctionnement moteur, le système serait équivalent à deux aimants permanents, l'induit
occupant une fois pour toutes une position déterminée
− en fonctionnement générateur, la tension recueillie serait de type alternatif, donc à valeur
moyenne nulle.
Cette inversion est obtenue grâce à un collecteur, ensemble de lames de cuivre isolées électri-
quement les unes des autres et reliées au bobinage, en contact électrique avec des balais calés
sur la ligne neutre ( endroit où le flux s'annule ), qui constituent les points d'entrée et de sortie
du courant dans le bobinage.
Actuellement, pour ce qui concerne les machines à inducteur bobiné, on en distingue essenti-
ellement deux types:
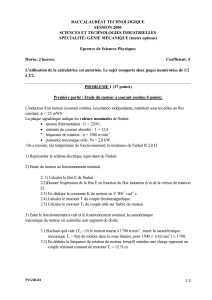
− Celles dites "à excitation séparée" ( cf. figure 1 ) pour laquelle l'induc-
teur est alimenté par une source auxiliaire et consomme généralement un
courant faible devant la valeur nominale du courant d'induit.
− Celles dites "série" ( cf. figure 2 ) où, comme le nom l'indique, le circuit
inducteur est placé en série avec le circuit d'induit, l'ensemble étant ali-
menté par une source unique.
Dans les applications usuelles, c'est essentiellement la machine à excita-
tion séparée qui est utilisée. A priori, nous raisonnerons donc en ces termes
dans tout ce qui suit. Nous reviendrons cependant sur la machine série dans
un paragraphe particulier à la fin du chapitre.
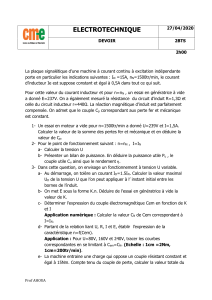
Schématiquement, si on fait abstraction du système collecteur-balais, on peut représenter la
structure d'une machine bipolaire à inducteur bobiné comme indiqué sur la figure 3. On y re-
trouve les deux bobinages précédents ainsi que deux éléments additionnels, les pôles de com-
mutation et l'enroulement de compensation, dont on précisera les rôles ci-après. Auparavant, il
faut signaler que le flux sous un pôle Φ créé par le bobinage inducteur n'est pas en permanence
proportionnel au courant correspondant, que nous noterons Ie. En effet, usuellement, la valeur
nominale de Ie correspond à un point de fonctionnement situé dans le coude de saturation de la
caractéristique magnétique du matériau.
Ue U MG
fi
gure 1
U MG
fi
gure 2

MC 2
figure 3
Rôle des pôles de commutation:
A chaque fois qu'une lame de collecteur passe sous un balai, le courant dans la spire correspon-
dante doit s'inverser en un temps très court. Du fait de l'inductance propre de la spire, il s'ensuit
une f.é.m. d'auto-induction élevée se traduisant par l'apparition d'étincelles entre balai et
collecteur. Pour remédier à ce phénomène, on injecte dans les spires concernées un flux antago-
niste à l'aide de l'enroulement bobiné sur les pôles de commutation. Ce flux devant être fonction
du courant d'induit, cet enroulement est mis en série avec l'enroulement d'induit et câblé de
façon à réaliser l'effet recherché.
Rôle de l'enroulement de compensation:
Lorsqu'un courant circule dans l'enroulement d'induit, celui-ci crée un champ magnétique sup-
plémentaire qui se superpose à celui créé par l'inducteur. On montre que, si le matériau magné-
tique est saturé, ceci se traduit par une diminution de Φ qui, comme on le verra plus loin, peut
avoir des effets indésirables sur le fonctionnement de la machine. L'enroulement de compensa-
tion a pour tâche de s'opposer à ce phénomène, appelé réaction magnétique d'induit. Il faut bien
sûr pour cela que le flux créé soit fonction du courant d'induit et ait le bon signe. L'enroulement
de compensation est donc placé en série avec celui d'induit et câblé de façon à obtenir le résultat
escompté. Signalons que, si cet enroulement est bien dimensionné, on peut négliger la réaction
d'induit quelles que soient les conditions de fonctionnement, Φ ne dépendant dans ce cas que du
courant inducteur. La machine est dite alors "parfaitement compensée". C'est l'hypothèse que
nous ferons dans tout ce qui suit.
2 Modélisation de la machine
Que ce soit en fonctionnement en moteur ou en génératrice, la machine en courant continu
est essentiellement caractérisée par la f.é.m. E engendrée dans le bobinage d'induit. L'effet d'in-
duction fait que celle-ci est proportionnelle au flux inducteur Φ et de la vitesse de rotation Ω.
En théorie, on montre que Ep
a
N=Φ
Ω
2π, avec p, nombre de paires de pôles, a, nombre de paires
roto
r
stato
r
pô
l
es
d
e
commutation
id
enrou
l
emen
t
induit
enrou
l
ement
d
e
compensation
enrou
l
emen
t
inducteur

MC 3
de voies d'enroulement et N, nombre de conducteurs. Cela dit, comme p, a et N sont fixés par
construction, nous regrouperons tous ces termes et le coefficient 2π dans une constante et nous
retiendrons le résultat sous la forme E = KΦΩ.
En dehors de cela, il faut tenir compte de la résistance R du bobinage d'induit et, en régime
variable, de son inductance L. Compte tenu de ceci, nous représenterons la machine à courant
continu par le schéma ci-dessous, à propos duquel il faut signaler les deux points suivants:
− Quel que soit son mode de fonctionnement, on utilise systématique-
ment une convention récepteur.
− Comme la vitesse de rotation peut, elle-même, être variable, E n'est
pas forcément constant. On conserve cependant une lettre majuscule
pour cette grandeur.
Sauf indication contraire, dans tout ce qui suit, on suppose que les grandeurs électriques qui
interviennent sont strictement continues, ce qui exclut par exemple le cas d'une machine ali-
mentée par des tensions issues de dispositifs redresseurs. D'autre part, on se limite au cas du
fonctionnement en régime permanent. Compte tenu de ceci, le schéma équivalent se réduit à
celui représenté ci-contre. Rappelons que R se mesure à l'aide d'une méthode
volt-ampéremétrique et que, sauf pour les machines à aimants permanents, E
dépend du courant d'excitation par l'intermédiaire de Φ ( la relation s'obte-
nant en faisant fonctionner la machine en génératrice à vide et en relevant la
caractéristique E = f(Ie) pour une vitesse Ω donnée ).
Remarques:
− Tant qu'on n'envisage pas une étude en régime transitoire mécanique, on peut choisir de rai-
sonner en termes de fréquence de rotation n, exprimée de préférence en tr/min, vu que c'est
l'unité employée dans les tachymètres usuels. E restant évidemment proportionnel à n, on
écrira la relation sous la forme E = kΦn, la nouvelle constante étant, bien sûr, différente de
l'ancienne ( on déduit facilement de KΦΩ = kΦn que kK=
π
30 si n est exprimé en tr/min ).
− Pour les machines à aimants permanents, on regroupe K et Φ en un seul terme, noté géné-
ralement KE et appelé constante de f.é.m ou constante de vitesse.
3 Expression théorique du couple électromagnétique
Elle s'obtient en écrivant que la puissance électromagnétique EI est égale à la puissance mé-
canique CeΩ, soit, en remplaçant E par KΦΩ, CeΩ = KΦΩI, d'où on tire finalement,
CKI
e=Φ
On peut signaler plusieurs points à ce propos.
− Le couple ne dépend que du courant d'induit, l'expression restant par ailleurs valable en
régime transitoire. Par contre, comme la relation fait intervenir Φ et que I est limité par le
L
R
i
E
u
fi
gure 4
R
I
E U
fi
gure 5

MC 4
dimensionnement de l'enroulement d'induit, on a intérêt à ce que le flux ait toujours la va-
leur maximale possible. On trouve donc ici une première raison de compenser la réaction
magnétique d'induit ( cf. ce qui a été dit à la fin du paragraphe 1 ).
− La relation est algébrique, Ce étant positif si I l'est et négatif sinon. Cela ne préjuge cependant
en rien du mode de fonctionnement ( moteur ou générateur ) de la machine, qui dépend aussi
du signe de la vitesse de rotation. Nous y reviendrons ultérieurement.
− Lorsque le fonctionnement se fait à flux constant, on peut remplacer le produit KΦ par une
"constante de couple" KT, exprimée en N.m/A.
4 Bilan de puissance − Rendement − Couple utile
Nous nous limiterons ici au cas du fonctionnement en moteur d'une machine à inducteur
bobiné. On note comme précédemment U et I les grandeurs relatives à l'induit, Ue et Ie celles
relatives à l'inducteur.
Vu le type de la machine, la puissance absorbée est égale à la somme des deux termes UI et
UeIe. Les pertes sont constituées par:
− Les pertes par effet Joule dans l'induit pJ = RI².
− Les pertes par effet Joule dans le circuit inducteur pexc = UeIe ou pexc = ReIe² si on connaît la
résistance Re de ce circuit.
− Les pertes fer pfer essentiellement localisées au rotor.
− Les pertes mécaniques pméca.
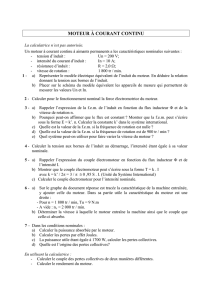
Au total, on peut représenter le bilan de puissance comme indiqué ci-dessous.
figure 6
Comme les pertes d'excitation sont compensées par la puissance fournie par la source auxili-
aire, la puissance utile, égale à Pa − Σpertes, vaut aussi
Pu = UI − RI² − pfer − pméca
On en déduit une expression possible du rendement η=P
P
u
a
: η= −−−
+
UI RI p p
UI U I
fer méca
ee
²
ainsi qu'une du couple utile CP
u
u
=Ω: CUI RI p p
u
fer méca
=−−−²
Ω
Il faut noter que, comme les pertes fer sont essentiellement localisées au rotor, le couple de
pertes, égal à la différence entre le couple électromagnétique et le couple utile, s'exprime ici par
la relation Cpp
p
fer méca
=+
Ω.
Pu = CuΩ Pe = Ce
Ω
pfer
pexc = UeIe
pJ = RI²
Pa = UI + UeIe
pméca
 6
7
8
9
10
11
12
13
14
15
16
6
7
8
9
10
11
12
13
14
15
16
1
/
16
100%