Les réseaux de neurones: théorie et applications

1
Université du Québec à Rimouski
Richard Lepage
M.Sc.A. ingénierie
M.Sc. Océanographie
Étudiant au doctorat en Ingénierie
Réseaux de neurones formels
et logique floue
Département de Mathématiques, d’Informatique et de Génie.
DMIG
Université du Québec à Rimouski
Université du Québec à Chicoutimi
@2010

2
Plan de la discussion
Historique et concepts.
Les types de réseaux neuronaux.
Les champs d’applications.
Évolution future des réseaux de neurones.
Conclusion.

3
HISTORIQUE ET CONCEPT DES RÉSEAUX NEURONAUX
Naissance du modèle théorique du neurone biologique élaboré par 2
neurobiologistes (McCulloch et Pitts) en 1943.
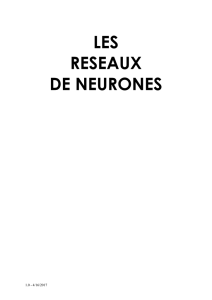
Schématisation d’un
neurone biologique
Modélisation d’un neurone
formel à partir du modèle
biologique
n
iii xwxwxwxwY 0221100
)sgn(S
1
1Y
0Y
On associe un poids à
chacune des entrées xi.
L’ensemble des entrées-poids
est ensuite appliqué à un
sommateur suivi d’un
comparateur. Fonction d’activation
de la sortie Yj

4
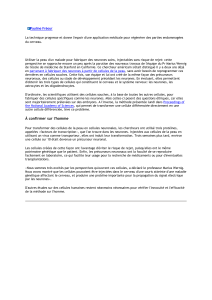
Neurone formel (automate à seuil avec entrées et sorties binaires).
Application à la logique Booléenne.
A(x1) B (x2) S(y)
0 0 0
0 1 1
1 0 1
1 1 1
OU logique
A (x1) B (x2) S(y)
0 0 0
0 1 0
1 0 0
1 1 1
ET logique
35.0
1
w
35.0
2
w
1
x
2
x
Y
)sgn(S
n
iii xw
1
1
0
x
3.
0
w
35.0
1
w
35.0
2
w
1
x
2
x
Y
)sgn(S
n
iii xw
1
1
0
x
5.
0
w
bmxy
w
w
x
w
w
you
2
0
2
1
Les poids w1et w2
sont liés à la pente
de la droite tandis
que w0et w2sont
liés à l’ordonnée à
l’origine de la
droite.
HISTORIQUE ET CONCEPT DES RÉSEAUX NEURONAUX
0),( 02211 wxwxwcbyaxyxd
Nécessité d’un
algorithme pour
automatiser le
processus de
modification des
poids.
Dans la configuration porte logique, le modèle se comporte comme un séparateur linéaire
entre deux classes distinctes. Les deux classes sont séparées par une droite dont la pente
et l’ordonnée sont définies par la valeur des poids. Dans cet exemple, la valeur des poids a
été préalablement définie.
)sgn(S
1
1Y
0Y
yxxx 21 ,
S=0
S=1
x1
x2
S=0
S=1
x1
x2

5
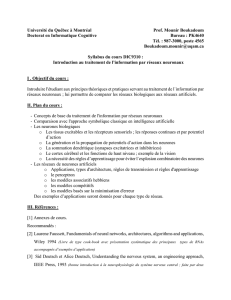
Règles du Perceptron
En 1949, découverte de la règle d’apprentissage de Hebb pour la mise à jour
automatique des poids du réseau entrainant le développement de l’algorithme du
Perceptron selon une sortie désirée d(i) durant un processus d’apprentissage.
Étape 1 –Choisir des valeurs aléatoires pour les poids et le biais
Étape 2 –Appliquer le vecteur d’entrée x(i)
Étape 3 -Calculer la valeur de S()
Étape 4 –Si S= d(i) on retourne à l’étape 2 sinon on passe à l’étape 5
Étape 5 -–
Étape 6 - Retourner à l’étape 2.
n
www ..,21
0
w
02211 ... wxwxwS
)()(dw ),(i0 idixiddw
nidwww ..1pour dwww ,iii000
HISTORIQUE ET CONCEPT DES RÉSEAUX NEURONAUX
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
1
/
49
100%