Télérobotique et réalité virtuelle : l avenir de la chirurgie

304
La Lettre de l’hépato-gastroentérologue - no6 - vol. III - novembre-décembre 2000
DOSSIER THÉMATIQUE
Télérobotique et réalité virtuelle :
l’avenir de la chirurgie hépatique
●
J. Marescaux, B. Malassagne, L. Soler, J. Leroy*
C
ontrairement à l’imagerie médicale convention-
nelle, la réalité virtuelle offre une vision 3D natu-
relle du malade, sous la forme d’une copie numé-
rique. Cette représentation 3D permet de mieux percevoir les
objets en les rendant plus visibles et en permettant à l’observa-
teur de s’immerger dans l’image, d’interagir avec elle et de navi-
guer dans son univers.
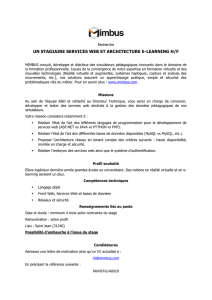
Ainsi, la réalité virtuelle est définie par trois bases fondamentales :
l’immersion, la navigation et l’interaction (figure 1). L’immersion
correspond à la sensation d’être “plongé” dans l’univers de l’image
3D. La navigation correspond au déplacement à l’intérieur de
l’image, c’est-à-dire à l’intérieur des objets. Enfin, l’interaction
consiste en la manipulation, la déformation et la transformation de
l’image 3D en temps réel, comme s’il s’agissait de matière.
Si la réalité virtuelle permet au chirurgien de mieux percevoir les
lésions que présente le malade, la robotique, elle, apporte une
aide physique. Cette aide consiste à faire appliquer la gestuelle
chirurgicale à des outils télémanipulés dont l’évolution est contrô-
lée. Les buts de la robotique sont aujourd’hui de faciliter l’inter-
vention, de la rendre moins agressive et d’en améliorer les tech-
niques. Demain, la robotique intégrera toutes les données de la
planification préopératoire de l’intervention, ce qui permettra de
réaliser au bloc opératoire l’opération qui correspond le mieux à
la nature et à la localisation des lésions du malade.
ENJEUX
La réalité virtuelle s’applique tout particulièrement à la chirurgie
hépatique dont les principes reposent sur les rapports anatomiques
entre tumeurs et vaisseaux intrahépatiques. La résection hépatique
doit être suffisante pour obtenir de bonnes marges de sécurité
tumorale, sans être excessive pour ne pas entraîner d’insuffisance
hépatique postopératoire, surtout en cas d’hépatectomie majeure
sur foie pathologique. Une évaluation préopératoire précise de
l’étendue de l’hépatectomie et des volumes de foie restant après
exérèse est donc indispensable lors de la planification préopéra-
toire. L’imagerie usuelle, scanner et IRM, n’offre que des recons-
tructions 3D complexes, incertaines, et surtout, elle ne permet
aucune interactivité. De plus, la visualisation des reconstructions
nécessite des machines et des stations graphiques lourdes et coû-
teuses. Ces contraintes techniques ne permettent pas de proposer
en routine au clinicien une imagerie hépatique 3D. Les recons-
tructions 3D ne peuvent être que mentales et à partir des images
2D. Ce n’est que lors de l’intervention chirurgicale que la recons-
truction mentale 3D sera confrontée à la réalité.
RECONSTRUCTION 3D SEMI-AUTOMATIQUE
Le premier système a été mis au point à partir des données bidi-
mensionnelles du projet Visible Human (1, 2) provenant de la
National Library of Medicine (NLM, Washington/États-Unis) (1).
Il a permis une reconstruction semi-automatique 3D du foie. Un
modèle réaliste 3D de l’anatomie du foie a été créé en utilisant un
langage mathématique adapté à l’analyse d’images médicales
(3-5). Ce modèle permet aujourd’hui un apprentissage de l’anato-
mie hépatique et une initiation aux concepts de la réalité virtuelle.
Dans un second temps, des outils d’aide à la planification chi-
rurgicale ont été mis au point avec ce premier système informa-
tique en simulant une tumeur hépatique par l’ajout de lésions vir-
tuelles. Le chirurgien peut ainsi délimiter interactivement
* IRCAD (Institut de recherche contre les cancers de l’appareil digestif),
EITS (European Institute of Telesurgery), Strasbourg.
Figure 1. Les trois bases de la
réalité virtuelle : immersion,
navigation et interaction.
HEPATO-GASTRO 6 27/08/02 16:55 Page 304

305
La lettre de l’hépato-gastroentérologue - no6 - vol. III - novembre-décembre 2000
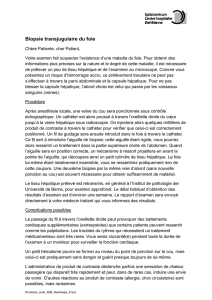
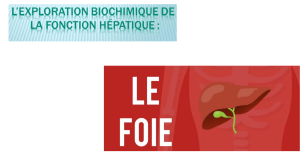
plusieurs plans de coupe mimant différentes hépatectomies pos-
sibles pour une même tumeur et ainsi évaluer celle qui assure le
meilleur compromis entre sécurité carcinologique et maintien
d’une bonne fonction hépatique postopératoire (figure 2).
SIMULATEUR CHIRURGICAL
Un simulateur d’intervention chirurgicale a été élaboré en colla-
boration avec l’INRIA (Institut national de recherche en infor-
matique et automatique) dans le cadre du projet EPIDAURE.
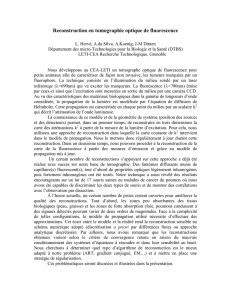
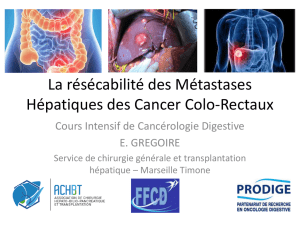
Ce simulateur autorise la réalisation de résections en temps réel
d’un foie virtuel déformable, avec un rendu visuel réaliste et une
sensation tactile des gestes opératoires par le biais d’un système
à retour d’effort (figure 3). Ce simulateur permet aujourd’hui de
s’initier à la chirurgie laparoscopique hépatique et de dévelop-
per les travaux de recherche au laboratoire de la téléchirurgie de
demain.
RÉALITÉ CLINIQUE
Afin d’être applicable en clinique, un système de reconstruction
3D automatique du malade, fonctionnant sur un ordinateur por-
table multimédia, équipé d’une carte 3D standard, a été développé.
La reconstruction automatique est fondée sur la traduction des
connaissances médicales sous la forme de contraintes topologiques
et géométriques (6, 7). L’ordinateur permet une observation réa-
liste des organes reconstruits et une vision par transparence des
structures internes, ce qui facilite
l’identification des arborescences vas-
culaires. L’organe peut être manipulé
en temps réel. Ainsi, l’ordinateur enre-
gistre l’ordre, traite les informations
et recalcule quasi instantanément
l’image correspondant à la position
souhaitée par l’observateur. Toutes les
hépatectomies peuvent être réalisées
virtuellement. Il est possible d’analy-
ser les marges de sécurité tumorale et
les volumes de foie restant pour
chaque hépatectomie réalisée virtuel-
lement. Cet outil informatique permet
une véritable planification préopéra-
toire adaptée à la pratique clinique. L’opérateur n’a plus alors
qu’à se concentrer sur le geste technique opératoire qui
a été totalement élaboré et testé virtuellement avant
d’être pratiqué.
PERSPECTIVES
Ces premiers travaux représentent les bases
d’élaboration des nouveaux outils. Avec la
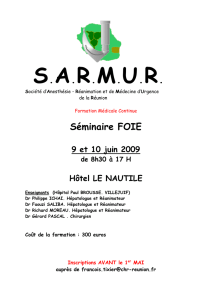
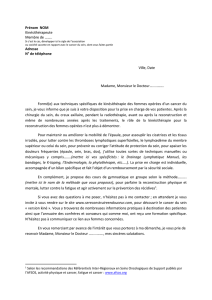
reconstruction 3D des lésions tumorales, on pourra réaliser un
suivi automatique au cours du temps du volume des tumeurs
(concept 4D = 3D + temps). Il sera ainsi possible d’évaluer objec-
tivement les réponses aux traitements en faisant correspondre les
reconstructions 3D successives des lésions d’un même patient à
des temps différents (figure 4).
Figure 2. Reconstruction 3D du foie et simulation d’une hépatectomie droite pour tumeur du foie droit.
Figure 3. Simulateur d’intervention chirurgicale à retour d’effort
fonctionnant en temps réel.
Figure 4. Suivi
automatique au
cours du temps
des volumes
tumoraux.
HEPATO-GASTRO 6 27/08/02 16:55 Page 305

306
La lettre de l’hépato-gastroentérologue - no6 - vol. III - novembre-décembre 2000
DOSSIER THÉMATIQUE
Figure 5. Principe de superposition de la reconstruction 3D sur le
patient.
Figure 6.
En haut, télé-
manipulation
par l’intermé-
diaire du robot
Zeus (Computer
Motion. Inc).
En bas, concept
d’automa-
tisation par
le couplage
de la réalité
augmentée
et de la télé-
chirurgie.
Cette application informatique permettra d’accéder au monde de
la réalité augmentée, en offrant une visualisation en transparence
des arborescences internes de l’organe. Il sera alors possible de
superposer la reconstruction 3D sur l’organe réel (figure 5). Par
cette vue en transparence virtuelle, l’opérateur disposera en per-
opératoire de repères anatomiques et tumoraux identiques à ceux
utilisés au cours de la planification préopératoire.
À terme, par le couplage des systèmes de téléchirurgie à ceux de
la réalité augmentée, la disposition de ces repères anatomiques
en temps réel lors de l’intervention chirurgicale aboutira à l’auto-
matisation de gestes répétitifs ou délicats (figure 6). Au cours
de l’intervention, le système de pilotage de l’instrumentation
intelligente bénéficiera d’une analyse navigationnelle de l’inter-
vention afin de s’assurer de sa conformité avec celle simulée
avant l’intervention. De tels systèmes sont actuellement en cours
de développement en Europe et aux États-Unis (Da Vinci®Intui-
tive Surgical ; Zeus - Computer Motion Inc®). ■
Mots clés. Télérobotique – Réalité virtuelle – Chirurgie
hépatique.
RÉFÉRENCES BIBLIOGRAPHIQUES
1. Marescaux J, Clément JM, Tassetti V et al. Virtual reality applied to hepatic
surgery simulation : the revolution of the next future. Ann Surg 1998 ; 228 :
627-34.
2. Ackerman MJ. The visible man project. Washington : National Library of
Medicine : http://www.nlm.nih.gov/research/visible/
3. Ayache N. Medical computer vision, virtual reality and robotics. Image
Vision Computing 1995 ; 13 : 295-13.
4. Delingette H. Simplex Meshes : a general representation for 3D shape
reconstruction. INRIA technical report 1994 ; 2214.
5. Montagnat J, Delingette H. Volumetric Medical Images Segmentation
using Shape Constrained Deformable Models. CVRMed-MRCAS, J. Troccaz,
E. Grimson, R. Mösges, éd. Springer Verlag Publisher LNCS 1997 ; 120 :
513-22.
6. Soler L, Clément JM, Koehl C et al. An Automatic Virtual Patient Recons-
truction from CT-Scans for Hepatic Surgical Planning. Medical Meet on
Virtual Reality 2000, january 2000, Los Angeles (États-Unis).
7. Soler L, Delingette H, Malandain G et al. A Fully Automatic Anatomical,
Pathological and Fonctionnal Segmentation from CT-scans for Hepatic Sur-
gery. Medical Imaging 2000, february 2000, San Diego (États-Unis).
HEPATO-GASTRO 6 27/08/02 16:55 Page 306
1
/
3
100%