COMPORTEMENT SYSTEMES PREMIER ORDRE ε

Sciences de l’ingénieur - PTSI – lycée Joliot curie SIII – Comportement des systèmes automatisés
CO_SIII_asserv_1er_ordre.doc J.LETARD – J.HERY page 1
COMPORTEMENT SYSTEMES PREMIER ORDRE
1. APPLICATIONS
1.1 Circuit électrique RC
La charge du condensateur étant initialement nulle, on ferme
l'interrupteur à t=0.
A t>0, on impose une consigne du type
!
ue(t>0) =U0
.
En utilisant la loi des mailles l'équilibre électrique se traduit par
l'équation :
D’où l’équation différentielle suivante :
Recherche solution générale sans second membre :
Recherche solution particulière de la même forme
que l’entrée :
Recherches conditions intiales :
Solution complète de l’équation différentielle :
εs
Consigne
Sortie

Sciences de l’ingénieur - PTSI – lycée Joliot curie SIII – Comportement des systèmes automatisés
CO_SIII_asserv_1er_ordre.doc J.LETARD – J.HERY page 2
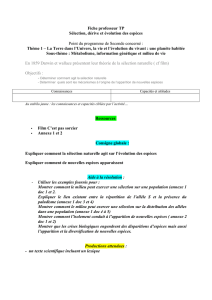
1.2 Comportement d’un moteur à courant continu.
Considérons un moteur entraînant une charge, en entrée on dispose d'un couple moteur Cm(t) et en sortie une vitesse
de rotation ω(t). On note f le coefficient de frottement visqueux et J le moment d'inertie de la charge par rapport à son
axe de rotation
x
.
Modélisation du moteur à courant continu
Equations régissant le fonctionnement du moteur à courant continu
Equations électriques
(1)
(2)
Avec
)(te
: force contre électromotrice du moteur
)(t
!
: vitesse de rotation du moteur
)(ti
: intensité dans l'induit du moteur
)(tu
: tension d'alimentation de l'induit
Ke
: constante électrique
R
: résistance de l'induit
L
: inductance de l'induit
Equations mécaniques
(3)
(4)
Avec
)(tCr
: couple résistant appliqué sur
le moteur
)(tCm
: couple fourni par le moteur
f
: coefficient de frottement
visqueux
Kt
: constante de couple
J
: moment d'inertie du moteur
Remarque : lorsque
Cm
est très important devant le couple dû aux pertes on peut dire que
KtKe =
.
Moteur
Charge
ω(t)
Cm(t)
J
f
x

Sciences de l’ingénieur - PTSI – lycée Joliot curie SIII – Comportement des systèmes automatisés
CO_SIII_asserv_1er_ordre.doc J.LETARD – J.HERY page 3
Souvent l’inductance d’une bobine est donnée en mH et
une résistance en Ω voir kΩ. Il n’est pas rare d’avoir un
rapport de 1000 ou plus entre les valeurs de la
résistance et de l’inductance de l’induit d’un moteur à
courant continu on pourra donc parfois négligé
l’inductance L de celui-ci.
En prenant comme hypothèse que le couple résistant
n’est dû qu’au seul frottement visqueux
Déterminer la relation entre ω(t) et u(t) pour le moteur ainsi modélisé.
1.3 Comportement Modélisable par 1 premier ordre pour les 2 applications

Sciences de l’ingénieur - PTSI – lycée Joliot curie SIII – Comportement des systèmes automatisés
CO_SIII_asserv_1er_ordre.doc J.LETARD – J.HERY page 4
1.4 Autre méthode de résolution
1.5 Analyse réponse à un échelon pour le système précédent
Transformée de Laplace pour un échelon :
Fonction Temporelle
Transformée de Laplace
Fonction Temporelle
Transformée de Laplace
Ecehelon
p
1

Sciences de l’ingénieur - PTSI – lycée Joliot curie SIII – Comportement des systèmes automatisés
CO_SIII_asserv_1er_ordre.doc J.LETARD – J.HERY page 5
2. COMPORTEMENT D’UN SYSTEME DU PREMIER ORDRE
2.1 Forme canonique de la fonction de transfert d'un système du 1er ordre
Avec G : gain statique,
)(
)(
lim te
ts
G
t!"
=
τ : constante de temps
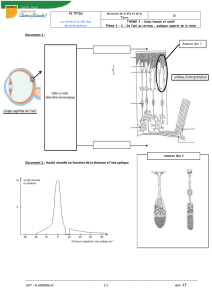
2.2 Réponse aux entrées types
• Réponse indicielle
!
d'où et réduction en éléments simples
, on trouve et
D'où
D'où la réponse temporelle
Temps de réponse tr5% :
Tangente à l'origine
t
EG
ty
!
0.
)( =
, coupe la droite
G.E0 pour t=τ.
Pour t=τ s(t)=G.E0(1-e-1)=0.63G.E0
Remarque : la réponse à un échelon d'un système du premier ordre présente toujours une erreur statique, sauf
si G=1.
 6
7
6
7
1
/
7
100%