electricite - Le Repaire des Sciences

1
Université d’Orléans Licences de Physique et de Chimie
UFR Sciences 1ère année
ELECTRICITE
Cours basé sur le manuscrit de M. Pascal Loos
Pascal.Loos @ ac-nancy-metz.fr
Septembre 2004

2
Chapitre 1
INTRODUCTION : nature du courant électrique
Dans un grand nombre de substances
(conductrices) l'apparition d'une différence
de potentiel provoque le déplacement de
charges présentes dans la substance : un
courant électrique.
On cherche à établir une relation entre la
cause (la différence de potentiel) et l'effet
(le courant).
I. Conduction dans un métal
I.1. Description de l'état du métal
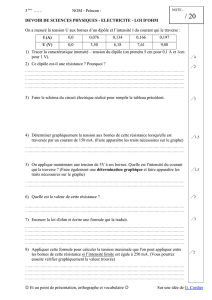
Un métal est composé d'ions lourds,
pratiquement immobiles, et d'électrons qui se
déplacent au hasard en se heurtant aux ions.
En l’absence de différence de potentiel entre
deux points d’un conducteur métallique
(situation d’équilibre électrostatique), ces
électrons « libres » sont en mouvement
désordonné. Dans ce mouvement, dû à
l’agitation thermique, les électrons ont des
trajectoires en ligne brisée correspondant aux
chocs contre les ions fixes du métal. D’autres
matériaux répondent à ce modèle.
I.2. Phénomène d’écoulement de charges
Lorsqu’une différence de potentiel extérieure
U est appliquée entre deux sections d’un
conducteur cylindrique placées à une distance
d l’une de l’autre, elle crée un champ
électrique
E
r
d’intensité U/d constante le long
du conducteur. Les ions du métal restent en
place, mais les électrons libres sont accélérés
dans la direction opposée au champ sous
l’action de la force électrique de Coulomb,
Eef
r
r
−=
. L’accélération, d’amplitude eE/m,
conduit à un accroissement de la vitesse de
l’électron dans la direction opposée au champ,
et ce jusqu’à ce que l’électron rencontre un
ion ou un autre électron. Après cette collision,
l’électron repart dans une direction
quelconque qui est immédiatement corrigée
par la force
f
r
.
L’effet du champ se superpose donc au
mouvement aléatoire de chaque électron (qui
résulte à la fois de l’agitation thermique et des
collisions avec les ions). Ceci conduit à un
déplacement d’électrons en moyenne dans la
direction opposée au champ, avec une vitesse
moyenne de dérive Vder qui est de l’ordre de :
ô
m
eE
~Vder
, où τ est l’intervalle de temps
moyen entre deux collisions. Cette dérive
dans la direction opposée au champ conduit à
un écoulement d’électrons le long du
conducteur, qui est le courant électrique.
Les électrons vont dans le sens des potentiels
croissants (à l’opposé du champ électrique).
On dit que le courant électrique va dans le
sens opposé, celui des potentiels décroissants.
La vitesse instantanée d'un électron est de
l'ordre de 106 m/s. Sa vitesse moyenne est
beaucoup plus faible, de l'ordre de 1 mm/s.
Tous les électrons ont le même mouvement
d'ensemble, à la même vitesse moyenne : il
n'y a pas d'accumulation de charges dans le
volume du conducteur.
I.3. Mobilité des charges
Comme indiqué ci-dessus, la vitesse moyenne
des électrons est proportionnelle au champ
électrique appliqué:

3
EìVder =
µ est une constante, la mobilité des électrons,
qui dépend de l'état du métal (en particulier de
sa température, qui contrôle la valeur du
paramètre τ). Elle se mesure en m2/V.s.
I.4. Comparaison entre l'équilibre
électrostatique et la conduction
Porteur
de charge
Champ
Potentiel
Métal à
l'équilibre
Vitesse
moyenne
nulle
Nul à
l'intérieur
Constant
Métal
traversé
par un
courant
Vitesse
moyenne
faible mais
non nulle,
dans le sens
des
potentiels
croissants
Non nul à
l'intérieur,
dans le sens
des potentiels
décroissants
(sens du
courant)
Gradient
constant
I.5. Densité de courant et intensité du
courant
Modèle simplifié de conducteur métallique :
conducteur cylindrique homogène ; la
conduction se fait dans l'axe du cylindre.
Une différence de potentiel V1 – V2 est
appliquée entre deux sections droites du
cylindre placées en A et B. Le potentiel,
constant sur une section droite quelconque du
cylindre est linéairement décroissant en
fonction de la distance à l’extrémité A. Le
champ électrique est dirigé suivant l'axe, et
constant en tout point du conducteur. La
vitesse moyenne des électrons aussi.
La quantité de charge qui traverse une section
du conducteur pendant une seconde est
appelée intensité du courant dans le
conducteur. On peut écrire cette définition
sous la forme :
I = dq/dt
Elle s'exprime en Ampères (C/s).
La quantité de charge qui traverse une section
de surface unité du conducteur pendant une
seconde est appelée densité de courant. Elle
s'exprime par j = I/S. C'est pourquoi elle
s'exprime en A/m2. Elle a une grande utilité
pratique, car elle mesure la quantité de
courant qu'un matériau peut supporter.
II. Loi d'Ohm
II.2. Relation entre vitesse moyenne des
électrons et intensité du courant
dq est la charge des électrons qui ont traversé
une section S pendant dt. Ils se trouvent à une
distance de S inférieure ou égale à Vder.dt
Soit n le nombre d'électrons libres par unité
de volume du métal. Alors
dq = ne(SVder.dt)
Par conséquent
I = neSVder et j = neVder
II.2. Relation entre intensité du courant et
différence de potentiel
En introduisant la mobilité il vient :
I = neSµE
Or E est la différence de potentiel par unité de
longueur Donc :

4
C'est l'expression de la loi d'Ohm, en appelant
R la résistance du conducteur cylindrique
envisagé, l étant la longueur du conducteur.
R s'exprime en ohms, 1/R est la conductance
G et s'exprime en Siemens.
ρ est la résistivité du matériau, ρ s'exprime en
ohms.m. 1/ρ est la conductivité σ,
théoriquement en ohms(-1).m(-1), pratiquement
en ohms(-1).cm(-1).
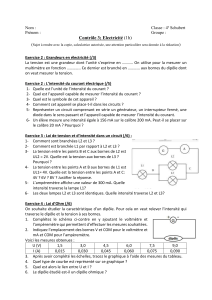
III. Conduction dans une
solution d'électrolyte
III.1. Description des phénomènes
Si V1 est inférieur à V2, les charges négatives
se dirigent vers l'électrode 2 : c'est l'anode, où
se dirigent les anions. Les cations se dirigent
vers la cathode, qui se trouve au plus bas
potentiel.
Ces deux types d'ions sont freinés par leur
interaction avec les autres molécules
présentes dans la solution, en particulier celles
du solvant.
III.2. Conductivité de la solution
La conductivité électrique de la solution est :
σ = CαNe(µc + µa)
Cette formule est valable pour un électrolyte
comprenant une seule espèce d'ions positifs et
une seule d'ions négatifs.
C est la concentration du soluté, α son degré
de dissociation, N le nombre d'Avogadro, e la
charge élémentaire, µc et µa les mobilités des
deux types d'ions.
La loi d'Ohm s'applique.
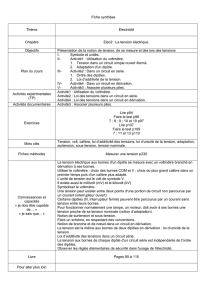
IV. Circuit électrique
Un circuit électrique est constitué d’éléments
passifs tels que ceux décrits ci-dessus
(conducteurs de résistance non nulle,
électrolytes), ou d’autres éléments passifs
décrits plus bas (condensateurs, bobines),
ainsi que d’éléments actifs (générateurs,
amplificateurs, etc ...). Ces éléments sont
reliés les uns aux autres par des fils de liaison
parfaitement conducteurs (ρ ∼ 0).
ABCD1D2D4D3

5
Chapitre 2
LES BASES : notations, théorèmes généraux
Notations utilisées dans le cours :
Sauf précisions, on utilise les notations
conventionnelles suivantes :
"minuscules" : u, i, p, … : grandeurs fonctions
du temps, en remplacement de u(t), i(t), p(t),
…
"MAJUSCULES" : U, I, Umoy, … : grandeurs
indépendantes du temps.
"Caractères gras" : E, B, F, … : grandeurs
vectorielles, en remplacement de
... , , , FBE
rrr
"Caractères soulignés" : U, I, Z, … :
grandeurs complexes associées à des
grandeurs sinusoïdales.
I. Définitions.
I.1. Courant
I.1.a. Définition.
Un courant électrique est une circulation de
porteurs de charges électriques. L'intensité du
courant électrique est la grandeur qui
quantifie le débit de charge en un point du
circuit.
t
q
id
d
=
(II-1)
L'orientation du circuit en ce point fait que l'intensité
est une grandeur algébrique (avec un signe). L’on
décide de l’orientation de manière arbitraire, dans le
cas général, mais si possible de manière à faciliter la
présentation (voir conventions de fléchage en I.3)
I.1.a. Loi des intensités (loi des nœuds).
La somme de toutes les intensités des
courants entrant en un point de liaison, appelé
nœud, est nulle.
I.1.b. A.R.Q.S. :
La loi qui précède ne peut être considérée
comme exacte que dans le cadre de
l'approximation des régimes quasi
stationnaires (ARQS) : c'est à dire dans les
cas où le produit de la dimension du circuit
par la fréquence des intensités considérées est
très inférieur à la célérité (vitesse) de la
lumière.
Par exemple, pour des fréquences de l'ordre
de 1 MHz, la dimension du circuit doit être
très inférieure à 300 m.
I.2. Tension ou d.d.p.
I.2.a. Définition
Pour obtenir une circulation de courant dans
un circuit, il faut qu'au moins deux points de
ce circuit soient à un instant donné à des
potentiels différents.
La notion de potentiel, directement liée à celle
de champ électrique, sera explicitée en cours
d’électrostatique. Pour l’instant, disons que
c’est une quantité, définie en tout point du
circuit, qui pourra être imposée en certains
points (source de tension). C'est une grandeur
algébrique. Conventionnellement, on
représente la tension
BAAB vvu −=
entre les
points A et B du circuit par une flèche dirigée
vers le point A (la première des deux lettres A
et B).
BAuAB
I.2.b. Loi des tensions (loi des mailles).
La somme des tensions effectuée en
parcourant une maille (ensemble d’éléments
reliés bout à bout, point de départ et d’arrivée
commun) est nulle.
BAuABCuBCuCA
En effet
0
AA =−vv
0
0
CABCAB
ACCBBA
=++⇒
=−+−+−⇒
uuu
vvvvvv
I.3. Dipôle
I.3.a. Définition.
Elément d'un circuit électrique comportant
deux bornes. Il impose une relation entre la
tension u à ses bornes et l'intensité du courant
i qui le traverse.
La fonction f liant u à i : u = f(i) imposée par
le dipôle est appelée caractéristique du
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
1
/
28
100%