2,57 Mo


Patrick BRUNET-Emile FERRERE Année 2000-2001
1
Sommaire
A. PRÉSENTATION DU SYSTÈME À RÉGULER..................................3
A.1.SCHÉMA DE PRINCIPE............................................................................3
A.2.DONNÉES POUR LA MODÉLISATION DU SYSTÈME
B.MODÉLISATION DU PROBLÈME AVEC MATLAB........................5
...................................4
B.1.PRÉSENTATION DE MATLAB................................................................5
B.2. CONSTRUCTION DU MODÈLE AVEC MATLAB.......................................6
B.2.1. Modélisation de la cuve....................................................................6
B.2.2. Modélisation du gradateur de puissance ..........................................7
B.2.3. « vectorisation » du contrôleur.........................................................7
B.2.4. Prise en compte d’une perturbation..................................................7
B.3. CONSTRUCTION DU CORRECTEUR FLOU.................................................8
B.3.1. Introduction à la logique floue .........................................................8
B.3.2. Notion d’ensemble flou.....................................................................8
B.3.3. Structure d’un contrôleur flou ........................................................10
B.3.3.1. Opération de fuzzification .........................................................10
B.3.3.2. Base de règles « d’inférence » ...................................................11
B.3.3.3. Mise en oeuvre de la base de règles...........................................11
B.3.3.4. Défuzzification..........................................................................12
B.3.3.5. Conclusion ................................................................................13
B.3.4. Utilisation de la boite à outils « Fuzzy logic »................................14
B.3.4.1. Opérations de fuzzification........................................................14
B.3.4.2. Sauvegarde du contrôleur dans l’espace de travail matlab .........15
B.4. RÉSULTATS DE SIMULATION................................................................16
B.4.1. Réponse à une consigne de température .........................................16
B.4.2. Réponse à une perturbation en régime établi..................................17
C. RÉGULATION TEMPS RÉEL DU SYSTÈME ..................................18
C.1. PRÉ-REQUIS LOGICIELS........................................................................18
C.2. CARACTÉRISTIQUES DE LA CARTE D’ENTRÉES / SORTIES .....................19
C.3. MODIFICATION DU MODÈLE.................................................................20
C.3.1. Insertion et paramétrage du bloc Analog Input ..............................21
C.3.2. Insertion et paramétrage du bloc Analog Output............................ 22
C.3.3. Paramétrage des propriétés des oscilloscopes................................23
C.4. GÉNÉRATION DU CODE ........................................................................24
C.5. EXÉCUTION DU CODE...........................................................................28

Régulation thermique sous Matlab
Patrick BRUNET-Emile FERRERE Année 2000-2001
2
C.6. RÉSULTATS TEMPS RÉEL......................................................................32
C.6.1. Réponse à une consigne de température .........................................32
C.6.2. Réponse à une perturbation en régime établi..................................33
C.6.3. Réponse à une modification de la consigne en cours de régulation 34
D. CONCLUSION.......................................................................................35

Régulation thermique sous Matlab
Patrick BRUNET-Emile FERRERE Année 2000-2001
3
A. Présentation du système à réguler
A.1. Schéma de principe
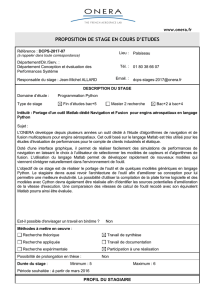
Le schéma de principe ci-dessus représente le synoptique de la régulation de température à réaliser
et dont le schéma fonctionnel est précisé ci-dessous :
Il s’agit de réguler la température de l’eau d’une cuve (seau d’une contenance de quelques litres)
équipée d’un thermoplongeur apportant l’énergie calorifique. Une sonde de température (PT100)
permet de mesurer la température réelle de l’eau. Il est bon de prévoir un brassage de l’eau dans la cuve
afin d’homogénéiser sa température.
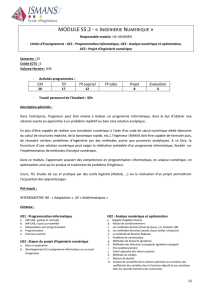
La puissance nominale du thermoplongeur (1 kW) est modulée grâce à un bloc de puissance
« GRADIPACK » (dénomination commerciale). Il s’agit d’un ensemble de 2 thyristors montés tête-
bêche (gradateur) permettant de faire varier la puissance électrique dissipée par variation de l’angle de
retard à l’amorçage des thyristors. Celle-ci est contrôlée par une tension de commande 0 -10V
continue (Ucom ) qui permet de faire varier la tension efficace (Ueff ) appliquée au thermoplongeur.
Le rôle du micro-ordinateur sera de faire la mesure de la température de la cuve à partir du signal
délivré par la sonde PT100 et sa mise à l’échelle, de comparer cette valeur avec la température de
consigne, de traiter l’écart entre ces 2 valeurs et de fournir une tension de commande utile pour le
« GRADIPACK ». Tout cela nécessite la mise en oeuvre d’une carte d’entrées-sorties analogiques.
uc
+
θ consigne
*
échantillonnage
Capteur :
sonde PT 100
Régulateur
E*
C.N.A.
-
*
Bloc de
puissance :
GRADIPACK
système :
cuve
θ
Fonctions gérées
par l’ordinateur
sonde PT 100
Thermoplongeur
Bloc de puissance
« gradipack »
220V/50Hz
Cuve dont l
a
température est
à
régule
r

Régulation thermique sous Matlab
Patrick BRUNET-Emile FERRERE Année 2000-2001
4
A.2. Données pour la modélisation du système
Cuve à chauffer :
On supposera que la capacité calorifique de la cuve à chauffer se réduit à l’eau qu’elle contient. En
prenant un volume de 3 litres, on obtient :
1
425.1318.4*3. −
≈== JKEEcmC
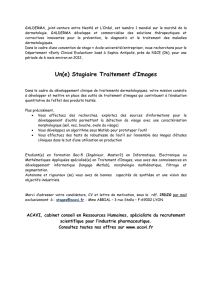
Contrôle du thermoplongeur :
230 V
8.5 V0.5 V
Ucom
Ueff
La figure ci-dessus donne la modélisation du fonctionnement du « GRADIPACK ». La tension
efficace appliquée au thermoplongeur passe de 0 à 230V si la tension de commande évolue de 0.5V à
8.5V. On pourra donc écrire :
()
5.0.
8
230 −= comeff UU
La puissance de chauffe sera donnée par :
()
()
2
2
.
N
eff
NU
U
PP =, soit en tenant compte de l’expression
précédente :
()()
22
25.06.155.0
8−=−= comcom
NUU
P
P
(en Watts).
Evaluation des pertes thermiques :
Les pertes thermiques peuvent se mettre sous la forme ()
extth KP
θθ
−= . (Loi de FOURIER).
L’expérience montre qu’elles sont faibles. On les estimera à 50 W pour un ∆θ = 25°C. D’où
1
2
−
=WKK
Bilan de puissance sur la cuve :
La puissance fournie par le thermoplongeur : PT, sert à élever la température de l’eau et participe
aux pertes soit :
()
()
ext
ini
TK
dt
d
CP
θθ
θθ
−+
−
=..
avec θ : température de l’eau
θ ini : température initiale de l’eau
θ ext : température extérieure à la cuve
 6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
1
/
36
100%