Devoir en temps limité no 6: Dynamique, molécules

MPSI2, Louis le Grand Devoir en temps limité no6: Dynamique, molécules samedi 25 février
Les sacs seront laissés devant le tableau. Conservez seulement de quoi écrire et une calculatrice :
pas de téléphone !
Si vous ne comprenez pas une notation, une question, ou si vous pensez avoir découvert une
erreur d’énoncé, signalez-le immédiatement.
Le référentiel terrestre sera considéré galiléen durant toute la durée des phénomènes étudiés.
Problème 1 : Lancer d’une boule de flipper
On modélise un flipper (jeu d’adresse de bar) comme un plan incliné d’un angle αpar rapport à l’hori-
zontale. On y étudie le mouvement plan et sans frottement d’une bille de masse massimilée à un point
matériel de position M. On désignera par #»
gl’accélération de la pesanteur, considérée uniforme.
Données : masse de la bille m= 10,0g, accélération de la pesanteur g= 9,80m ·s−2, inclinaison du plan
α= 15°, raideur du ressort k= 20N ·m−1, longueur de la trajectoire rectiligne D = 1,00m, rayon de la
trajectoire hémicirculaire R = 20cm.
I Poids apparent
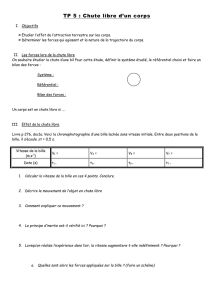
I.1. On oriente le plan du flipper par les vecteurs unitaires #»
exet
#»
ezdéfinis sur le schéma ci-contre. On y définit également
le vecteur unitaire #»
eyorthogonal au plan. Déterminer les
forces auxquelles est soumise la bille de position M. En dé-
duire que la résultante des forces dans le plan (#»
ex,#»
ez) se met
sous la forme m#»
g0=−mg0#»
ez, avec g0une constante positive
exprimée en fonction de get α. La bille est ainsi soumise,
dans le plan du flipper, à un poids apparent m#»
g0.
α
M
#»
ey
#»
ez
#»
ex
#»
g
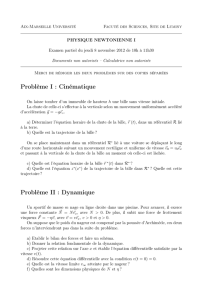
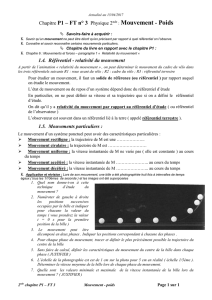
On représente le plan du flipper sur la figure 1. La
bille est lancée du point O1et suit une trajectoire rec-
tiligne de longueur D jusqu’en O2, puis une trajec-
toire circulaire de centre O3et de rayon R au contact
d’un guide hémi-circulaire.
#»
g′
#»
ez
#»
ex
#»
ey
D
2R
O1
O2
O3
O4
Figure 1.
P
z
O1
l0
M
z < 0
#»
g′
Figure 2.
II Propulsion
II.1. La bille est initialement posée à l’extrémité d’un ressort idéal de longueur à vide `0et de raideur k,
dont une extrémité est fixée au point P situé à l0du point O1, comme représenté sur la figure 2. On
pose O1M = z, négatif quand le ressort est comprimé.
(a) Déterminer l’expression de la compression ∆`eq =−zeq du ressort quand l’ensemble est à l’équi-
libre. Calculer ∆`eq.
(b) Établir l’équation différentielle vérifiée par la coordonnée zde la bille tant qu’elle est en contact
avec le ressort.
(c) On comprime le ressort d’une longueur ∆`isupplémentaire par rapport à la position d’équilibre
précédente et l’ensemble est lâché sans vitesse initiale. Déterminer l’expression de z(t).
II.2. Montrer que le contact bille-ressort peut par la suite être rompu si la compression initiale ∆`iest supé-
rieure à une valeur minimale ∆`pdont on donnera l’expression en fonction des données du problème.
Que vaut à l’instant de la rupture du contact l’accélération ¨
zde la bille ?
II.3. On suppose dans toute la suite que ∆`i>∆`pet on étudie le mouvement rectiligne de O1à O2. On
désigne par v1l’expression de la vitesse de la bille en O1.
(a) Déterminer l’expression de v1en fonction entre autres des compressions ∆`eq et ∆`i.
(b) En déduire l’expression de la vitesse vde la bille en un point M de coordonnée z= O1M>0.
Quelle doit être la valeur minimale ∆`Dde la compression ∆`ipour qu’elle atteigne le point O2
distant de O1de D ? Calculer ∆`D.
II.4. Pour cette question seulement, on prend en compte l’existence d’un frottement solide entre la bille et
le plan de coefficient µ, notable uniquement dans la phase O1M>0. On constate que pour la valeur
∆`idéterminée précédemment, la bille n’atteint pas O2: sa vitesse s’annule pour O1M = zmax <D.
(a) Exprimer µen fonction de zmax,D et de l’angle α.
(b) Pour quelle valeur minimale de µla bille reste-t-elle immobile en zmax ? Quelle est la valeur
correspondante du quotient zmax/D ?
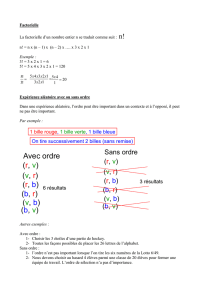
III Trajectoire circulaire
On néglige de nouveau les frottements et considère ∆`i>∆`D. La bille atteint le point O2avec une
vitesse qu’on note v2, positive selon #»
ez.
III.1. On étudie tout d’abord le mouvement quand la bille poursuit son mouvement en restant au contact
du guide hémicirculaire. On la repère par l’angle θ=# »
O3O2,
# »
O3M, orienté par le vecteur unitaire #»
ey.
(a) Établir les équations différentielles du mouve-
ment en coordonnées polaires.
(b) Vérifier que l’expression suivante de la vitesse
angulaire ˙
θest solution :
˙
θ=sv2
2
R2−2g0
Rsin(θ).(1)
En déduire l’expression de la force de réaction
normale #»
N exercée par le guide circulaire sur la
bille.
O2
O3
M
#»
eθ
#»
er
R
θ
#»
ez
#»
ex#»
ey
+
#»
g′
z
x
(c) Quelle condition la vitesse v2doit-elle vérifier pour que la bille puisse atteindre le point O4
diamétralement opposé à O2(voir figure 1.). Calculer la valeur limite notée v2`de v2puis la
valeur correspondante de la compression initiale ∆`i.
III.2. On considère maintenant que la condition précédente sur v2n’est pas remplie.
Julien Cubizolles, sous licence http://creativecommons.org/licenses/by- nc-nd/2.0/fr/.1/72016–2017

MPSI2, Louis le Grand Devoir en temps limité no6: Dynamique, molécules samedi 25 février
(a) On désigne par θmax l’angle pour lequel le contact est rompu. Établir la relation vérifiée par
θmax, v2,R et g0. Déterminer également le module et les composantes sur #»
exet #»
ezde la vitesse en
θ=θmax. On exprimera le module en fonction de v2uniquement et les composantes en fonction
de v2et de A = v2
2
3g0R.
(b) Quelle est la nature de la trajectoire ultérieure? Déterminer la valeur de A pour laquelle la bille
passe par O3. En déduire la valeur de ∆`icorrespondante et justifier que le flipper est un jeu de
précision.
Problème 2 : Ralentissement d’atomes froids
On étudie les principes des techniques utilisées depuis les années 1980 ipour refroidir et piéger des gaz
atomiques au moyen de champ magnétiques et de faisceaux laser. Aucune connaissance sur le champ ma-
gnétique, les lasers ni la structure atomique n’est nécessaire pour l’introduction présentée ici.
On considère un atome de rubidium 87Rb de masse m.
Données : masse d’un atome de Rubidium m= 1,46 ·10−25 kg, constante de Planck h= 6,63 ·10−34 J·s,
accélération de la pesanteur g= 9,81m ·s−2, intensité de la force F0= 1,50 ·10−20 N, coefficient β=
3,00 ·10−1s2·m−2, vitesse caractéristique v0= 4m ·s−1, vitesse initiale vi= 500m ·s−1.
I Ralentisseur à effet Zeeman
On étudie le ralentissement d’un jet d’atomes émis à grande vitesse
par une enceinte à haute température nommée «four». On considère
le mouvement d’un de ces atomes. On néglige dans un premier temps
le poids de l’atome ; on peut alors considérer que son mouvement est
unidimensionnel, selon un axe noté Ox.
On note vila vitesse de l’atome en x= 0, dirigée selon +#»
ex, et vxsa
vitesse à un instant ultérieur.
x
O#»
vi
I.1. (a) On considère tout d’abord que l’atome est soumis à une force constante #»
F = −F0#»
ex, avec F0>0.
Déterminer l’expression de vx(t).
(b) En déduire x(t) puis l’équation de la trajectoire dans l’espace des phases vx(x). Représenter son
allure.
(c) Déterminer l’expression de la distance `nécessaire pour arrêter l’atome en fonction de sa vi-
tesse initiale vi. Calculer `pour vi= 500m ·s−1(vitesse caractéristique d’un atome issu d’un
four à une température de 400K) et F0= 1,50 ·10−20 N. Commenter quant à la réalisation de ce
ralentissement en laboratoire.
(d) Calculer la durée nécessaire pour que l’atome parcoure la distance `et comparer à ce qu’elle
aurait été en l’absence de la force #»
F .
i. et couronnées entre autres par l’attribution du Prix Nobel 2007 à S. Chu, C. Cohen-Tannoudji et W.D. Phillips.
(e) Déterminer les expressions et les valeurs de la distance d’arrêt `et de la durée d’arrêt pour une
vitesse initiale égale à vi/2. Superposer à la courbe de la question I.1b la trajectoire dans l’espace
des phases correspondante. Par la suite, on considère de nouveau un atome de vitesse initiale vi,
sauf mention explicite du contraire.
I.2. La force #»
F est exercée par un faisceau laser et dépend en fait de la vitesse de l’atome (par ce qu’on
nomme l’effet Doppler) et de la présence d’un éventuel champ magnétique B(x) variable selon x. On
peut la mettre sous la forme :
#»
F = −F0
1 + β(vx(x)−αB(x))2
#»
ex,
avec αet βdes constantes positives.
(a) Rappeler l’expression de vx(x) lors d’une décélération constante due à une force de norme F0.
(b) En déduire quelle doit être l’expression de B(x) pour que le mouvement de l’atome soit unifor-
mément décéléré ? On réalise ainsi un ralentisseur Zeeman.
I.3. On considère dans cette question que B(x) est uniforme à la valeur B(x) = vi/α. On considère le mou-
vement jusqu’à l’annulation de la vitesse.
(a) Le ralentissement sera-t-il plus ou moins efficace que dans les conditions de la question I.2b ?
Déterminer un encadrement de la norme de la force F au cours du mouvement.
(b) En déduire un encadrement de la distance et de la durée d’arrêt (on donnera leur expression et
leur valeur). Donner également l’allure de la trajectoire dans l’espace des phases, qu’on superpo-
sera à celle de la question I.1b.
I.4. On considère maintenant un atome de vitesse initiale v0
i< vi. Le champ B(x) a la forme établie à la
question I.2b permettant d’assurer F = F0pour un atome de vitesse vi.
(a) Justifier sans calcul que la norme de la force F sera supérieure à :
F0
1 + β(vi−v0
i)2.(2)
En déduire un encadrement de la force F puis de la distance d’arrêt `. Calculer numériquement
les distances de l’encadrement pour v0
i= 0,8×vi.
(b) En déduire l’allure de la trajectoire dans l’espace des phases. On superposera :
•l’allure de la trajectoire de vitesse initiale v0
idans le champ B(x) correspondant à viet celles
correspondant à l’encadrement établi à la question précédente,
•la trajectoire de vitesse initiale vidans le champ B(x) correspondant à vi.
I.5. On considère désormais le cas v0
i> viProposer une borne de la norme F dépendant de v0
i−vi. Établir
la distance d’arrêt correspondante et superposer :
•l’allure de la trajectoire dans l’espace des phases de vitesse initiale v0
idans le champ B(x) corres-
pondant à viet celle correspondant à la borne déterminée à la question précédente,
•la trajectoire de vitesse initiale vidans le champ B(x) correspondant à vi.
I.6. On considère de nouveau un atome de vitesse initiale vi, dans le champ B(x) adapté à vidéfini à la
question I.2b. Le dispositif est tronqué au bout d’une distance xmax < ` et la structure pour x>xmax
est telle qu’on peut considérer #»
F = 0 pour x>xmax.
Déterminer l’expression et la valeur de xmax pour qu’on ait vx= 0,5m ·s−1pour x>xmax. Commenter.
Julien Cubizolles, sous licence http://creativecommons.org/licenses/by- nc-nd/2.0/fr/.2/72016–2017

MPSI2, Louis le Grand Devoir en temps limité no6: Dynamique, molécules samedi 25 février
II Interprétation quantique
La force #»
F est la conséquence de l’absorption par l’atome d’une partie des photons émis par le laser. On
considère un laser de longueur d’onde λ= 7,80 ·102nm.
II.1. Déterminer par analyse dimensionnelle la force moyenne (à une constante multiplicative près) subie
par l’atome s’il absorbe un nombre γde photons par seconde.
II.2. En déduire l’ordre de grandeur de γpour produire la force F0étudiée puis l’ordre de grandeur du
nombre de photons absorbés durant le freinage.
III Mélasse optique
On change dans toute la suite l’origine des axes : x= 0 correspond désormais à la sortie du ralentisseur
Pour finir le freinage, et «figer» les atomes, on utilise deux faisceaux laser se propageant en sens opposés.
Ils produisent la force totale :
#»
F =
F0
1 + β(v0+vx)2−F0
1 + β(vx−v0)2
#»
ex,(3)
avec v0une constante positive et vxla composante sur xde la vitesse
III.1. (a) Montrer, au moyen d’un développement limité, pour vxv0et vx1/(βv0), que la force se met
sous la forme : #»
F' −γvx
#»
ex,
avec γune constante positive dont on donnera l’expression. On utilisera cette expression dans
toute la suite.
(b) L’atome est initialement en x= 0 et animé de vx=v1. Déterminer vx(t) puis x(t) en fonc-
tion de v1,γ,m et t. Identifier une constante de temps τdont on calculera la valeur pour
β= 3,00 ·10−1s2·m−2et v0= 4,00m ·s−1.
(c) Déterminer également l’équation de la trajectoire dans l’espace des phases. Tracer l’allure des
trajectoires correspondant à des vitesses v1de module et de signe différents.
(d) Calculer la distance totale parcourue avant l’arrêt pour v1= 0,50m ·s−1.
III.2. On utilise désormais 3 paires de faisceaux lasers identiques à celle de l’équation (3) se propageant
respectivement selon Ox, Oyet Oz. On tient désormais compte pour cette question de la pesanteur en
notant #»
g=−g#»
ezson accélération. On considère l’atome initialement placé au point O de coordonnées
x= 0,y = 0, z = 0 et animé de la vitesse v1#»
ex. On note M sa position à un instant ultérieur.
(a) Établir l’équation différentielle vérifiée par le vecteur # »
OM(t).
(b) Résoudre cette équation différentielle et tracer l’allure de la trajectoire. On identifiera une vitesse
caractéristique v∞qu’on exprimera en fonction de get τet dont on calculera la valeur.
(c) Déterminer pendant combien de temps on peut conserver l’atome dans une boule de rayon R '
5mm autour du point O. On pourra effectuer des approximations dont on justifiera la pertinence.
(d) Quelle serait cette durée en l’absence des faisceaux lasers, dans le cas v1= 0 ?
Exercice 1 : Le Soufre
L’élément soufre a pour numéro atomique Z = 16.
1. Donner sa configuration électronique à l’état fondamental ainsi que son nombre d’électrons de va-
lence.
2. Proposer une structure de Lewis des espèces chimiques suivantes :
•H2S
•SO2
•SO3
•H2SO4
•CH3SOCH3
•SF6
3. Proposer une géométrie autour de l’atome de soufre pour les molécules H2S, SO2, SO3, et CH3SOCH3.
Préciser, en le justifiant, lesquelles de ces molécules sont planes.
4. Comparer les énergies et les longueurs des différentes liaisons S O dans H2SO4.
5. Comparer, en le justifiant, les électronégativités de S et O (Z = 8). En déduire quelles molécules parmi
H2S, SO2, et SO3possèdent un momment dipolaire. On précisera sa direction et son sens.
Julien Cubizolles, sous licence http://creativecommons.org/licenses/by- nc-nd/2.0/fr/.3/72016–2017

MPSI2, Louis le Grand Devoir en temps limité no6: Dynamique, molécules samedi 25 février
Correction du problème 1
I Poids apparent
I.1. La bille est soumise à son poids #»
P = −mg cos(α)#»
ey−mg sin(α)#»
ezet à la réaction du support #»
R = R#»
ey.
On écrit la relation fondamentale de la dynamique, dans RTgaliléen, pour un mouvement contraint
dans le plan #»
ez,#»
ex:
#»
eym¨
y= 0 = R −mg cosα#»
ez:md2z
dt2=−mg sinα.
On peut ainsi définir le poids apparent : m#»
g0=m#»
g0, avec #»
g0=−gsinα#»
ez.
Dans toute la suite, on ne mentionnera plus les composantes des forces sur vvEypuisqu’elles n’in-
fluent pas sur le mouvement dans le plan (#»
ex,#»
ez) (sauf pour le calcul de la force de frottement).
II Propulsion
II.1. (a) La bille est soumise selon #»
ezau poids apparent et à la force de tension du ressort #»
T =
−k# »
PM −`0#»
ez=−k(O1M)=−kz #»
ez. À l’équilibre, on aura donc :
−mg0−kz = 0 →z=−mg0/k =−∆`eq →∆`eq = 1,30mm.
(b) On a :
m¨
z=−mg0−kz →¨
z+ω2
0z=−ω2
0∆`eq,(4)
avec ω0=√k/m la pulsation du mouvement.
(c) Les solutions de cette équation différentielle sont : z=−∆`eq + Acos(ω0t+ϕ). Celle vérifiant
z(0) = −∆`eq −∆liet dz
dt(0) = 0 est :
z=−∆`eq −∆`icosω0t.
II.2. Le ressort ne peut que pousser la bille : le contact sera donc rompu dès que Tz(positive quand la
bille comprime le ressort) s’annule, ie pour une élongation nulle du ressort, quand la bille est en O1.
L’accélération de la bille sera alors égale à #»
g0.
Il faut pour que ce point soit atteint que le sommet de la trajectoire déterminée précédemment, −∆`eq+
Delta`isoit au-dessus de O1, soit ∆`i>∆`eq.
II.3. (a) On calcule la vitesse à l’instant t1où z= 0 :
z(t1) = −∆`eq−∆`icos(ω0t1)→v1=˙
z(t1) = ω0∆`isin(ωt1) = ω0∆`iq1−∆`2
eq/∆`2
i=ω0q∆`2
i−∆`2
eq.
(5)
(b) Le mouvement est par la suite une chute libre d’accélération #»
g0. En choisissant une nouvelle
origine des temps à l’instant du décollement, On a donc :
z(t) = v1t−g0t2/2 et : ˙
z(t) = v1−g0t
t=v1−v
g→z=v2
1−v2
2g0.(6)
Elle atteindra le point O2si sa vitesse n’y est pas nulle. Dans le cas limite, on aura z= D quand
v= 0, soit :
D = v2
1
2g0.(7)
II.4. (a) Le bilan des forces établi à la première section assure que la force normale est #»
N = mg cos(α)#»
ey.
La loi d’Amontons et Coulomb assure alors que la force de frottement est, tant que la vitesse est
selon +#»
ez:#»
Ff=−µ#»
ez=−µmg cos(α)#»
ez.(8)
On a de nouveau un mouvement uniformément accéléré, d’accélération (−g0−µgcos(α))#»
ez. En
adaptant le résultat précédent, on détermine l’expression de la vitesse, la distance d’arrêt est
celle pour laquelle v= 0 :
z=v2
1−v2
2g(sin(α) + µcos(α)) →zmax =v2
1
2g(sin(α) + µcos(α)) =D
1 + µ/tan(α).(9)
(b) Une fois arrêtée, la bille peut rester en zmax si la somme des forces qui lui sont appliquée est alors
nulle. La force de frottement solide Ffdoit alors compenser le poids apparent, soit Ff=mg0.
Comme Ffne peut pas dépasser µN = µmg cos(α), l’équilibre ne sera possible que si tan(α)6µ,
soit zmax 6D/2.
III Trajectoire circulaire
III.1. (a) La bille est soumise à son poids apparent et à la réaction #»
N = Ny
#»
ey+ Nr
#»
erdu guide hémi-
circulaire et du support (avec Nr60). On écrit la loi de la quantité de mouvement pour un
mouvement circulaire de rayon R. Avec #»
g0=g0(−sin(θ)#»
er−cos(θ)#»
eθ), on obtient, dans le plan
xOz
m −v2
R
#»
er+ R ¨
#»
eθt!=m#»
g0+ Nr
#»
er=−mg0cos(θ)#»
eθ+Nr−mg0sin(θ)#»
er(10)
(b)•La solution proposée vérifie la condition initiale : #»
v(θ= 0) = R ˙
θ(θ= 0) = v2,
•on vérifie qu’on a bien mR¨
#»
eθt=−mg0cos(θ).
En l’introduisant dans l’équation radiale, on obtient :
−mR˙
θ2= Nr−mg0sin(θ)→Nr=m
3g0sin(θ)−v2
2
R
.(11)
(c) Le point O4pourra être atteint si le contact n’est jamais rompu, Nrne doit donc pas s’annuler
pour 0 6θ6πy compris en π/2. On doit donc avoir : v2>p3g0R.
On vérifie également que le point θ=π/2 peut bien être atteint puisque pour cette valeur, l’équa-
tion (1) donne v(θ=π/2) = pg0R>0.
On calcule v2l= 1,20m ·s−1. Les expressions (6) et (5) donnent alors :
v2
2=v2
1−2g0D→∆`i=q∆`2
eq +∆leq (2D + 3R)= 5,80cm.(12)
Julien Cubizolles, sous licence http://creativecommons.org/licenses/by- nc- nd/2.0/fr/.4/72016–2017

MPSI2, Louis le Grand Devoir en temps limité no6: Dynamique, molécules samedi 25 février
III.2. (a) L’équation (11) permet de calculer l’angle pour lequel Nr= 0 : sinθmax =v2
2
3g0R. En ce point,
l’équation (1) permet de calculer :
v(θmax) = qv2
2−2g0Rsinθmax =rv2
2−2
3v2
2=v2
√3.
La vitesse étant orthoradiale, on a #»
v=v#»
eθ=v(cos(θmax)#»
ez+ sin(θmax)#»
ex), soit :
v(θmax) = v2
√3(p1−A2#»
ez+ A#»
ex) avec : A ≡sinθmax =v2
2
3g0R.
On a utilisé cosθmax =q1−sin2θmax =√1−A2puisque θmax ∈[0;π/2].
(b) Après rupture du contact, la bille n’est plus soumise qu’à son poids apparent, uniforme et sta-
tionnaire. Son mouvement est donc uniformément accéléré d’accélération #»
g0. Pour déterminer
la trajectoire, on utilise les coordonnées cartésiennes. En choisissant une nouvelle origine des
temps à l’instant du décrochage, les conditions initiales sont :
z(0) = Rsinθmax = RA
x(0) = −Rcosθmax =−R√1−A2
˙
z(0) = v2
3√1−A2
˙
x(0) = v2
3A.
Les équations paramétriques du mouvement sont donc :
z=−1
2g0t2+v2
√3√1−A2t+ RA
x=v2
√3At−R√1−A2
La droite x= 0 est atteinte pour t0=√3R√1−A2
v2Aet à cet instant :
z(t0) = −1
2g03R2(1 −A2)
v2
2A2+R(1 −A2)
A+ RA.
La bille passera par O3si z(t0) = 0, soit, puisque v2
2
3g0R= A :
−1−A2
2A3+1−A2
A+ A = 0 →1−A2= 2A4+ 2A2(1 −A2)→A = 1
√3→v2
2=√3g0R.
L’équation 12 donne alors :
∆`i=q∆`2
eq +∆`eq(2D + √3R) = 5,50cm.
Les trois valeurs particulières obtenue précédemment ∆`i= 5,10cm, ∆`i= 5,80cm et ∆`i=
5,50cm ne diffèrent que de quelques millimètres et conduisent à des mouvements très diffé-
rents : il faut donc une grande précision pour contrôler précisément la trajectoire de la bille.
Correction du problème 2
I Ralentisseur Zeeman
I.1. (a) On est dans le cas d’un mouvement unidimensionnel uniformément décéléré. La loi de la quan-
tité de mouvement s’écrit, en projection sur l’axe x:mdvx
dt=−F0qui s’intègre, compte tenu de la
condition initiale vx(0) = vien vx=vi−F0t
m.
(b) On intègre de nouveau, compte-tenu de la condition ini-
tiale x(0) = 0 :
x(t)−x(0) =
τ=t
Z
τ=0
vi−F0τ
mdτ
x(t) = vit−F0t2
2m.
On détermine la trajectoire dans l’espace des phases en
«éliminant le temps» : on a t=m(vi−vx)
F0, soit, après sim-
plifications :
x(t) = mv2
i−v2
x
2F0soit : vx=rv2
i−2F0x
m.(13)
On obtient l’allure représentée sur la courbe de la Fi-
gure 1.
`
vi
x
vx
Figure 1
(c) L’expression de vx(x) montre que la vitesse vxs’annule pour x=mv2
i
2F0, soit `= 1,20 ·10−1m. Il est
donc envisageable de réaliser ce ralentissement en laboratoire.
(d) La durée tfest celle pour laquelle vx(t)=0, soit tf=mvi
F0= 3,85 ·10−3s. En mouvement rectiligne
uniforme à la vitesse vi, la durée `aurait été parcourue en `/vi= 2,40 ·10−3m·s−1.
(e) Pour vi/2, la distance d’arrêt serait 4 fois plus faible mais la durée ne serait que 2 fois plus faible
(voir la courbe en traits interrompus sur la figure 1).
I.2. (a) On doit s’assurer que le dénominateur reste constamment nul pour que la force soit d’intensité
constante. Dans ce cas, la vitesse aura l’expression (13)
(b) Le champ B devra varier selon :
B = vx
α=qv2
i−2F0x
m
α.(14)
I.3. (a) On a, ∀x, Bx=vi/α, donc :
#»
F = −F0
1 + β(vi−vx)2
#»
ex.(15)
Au fur et à mesure que la vitesse diminue sous l’effet du freinage, le coefficient (vi−vx)2aug-
mente et l’intensité de la force diminue : le freinage sera donc moins efficace. L’intensité de
la force sera donc inférieure à F0mais néanmoins supérieure à sa valeur pour vx= 0, égale à
F0/(1 + βv2
i).
Julien Cubizolles, sous licence http://creativecommons.org/licenses/by- nc- nd/2.0/fr/.5/72016–2017
 6
7
8
6
7
8
1
/
8
100%